一种自动适应绝缘子形状的爬行机构
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及移动机器人技术领域,特别涉及一种自动适应绝缘子形状的爬行机构。
背景技术
爬行机构是一种常用的移动机器人机构,其可以在柱形或类似柱形杆上爬行运动,为其他操作或设备提供移动载体,如在水泥电线杆、木电线杆、桥梁桅杆、输电线路的绝缘子串等上爬行,实现对杆周围环境的检测或进行某些操作作业。爬行机构的运动性能的好坏,决定着爬行机器人是否可以正常工作,具有重要的实际应用价值。
目前爬行机构的按照移动工作原理分,可以分为蠕动式、连续运动式(轮式或履带式)或多连杆式。其中蠕动式具有原理简单,适应性好等特点,但其缺点明显,即运动效率太低,且运动平稳度差。连续运动式,主要包括轮式和履带式两种,可以通过轮子或履带与杆的滚动接触实现运动,优点是运动连续,运动效率高,爬行速度快,运动平稳性好,但可能会存在对杆的适应性较差或结构复杂等缺点。多连杆式,主要是通过多连杆机构的运动,实现输出连杆末端的特定运动轨迹,从而可实现对动物爬树动作的模拟,优点是驱动可以是连续运动,运动速度较高,但缺点是对杆的直径、形状适应能力较差,容错能力差,一旦一步未抱紧杆即有可能掉落。
按照行走部件与杆或绝缘子串之间的接触特点可分为轮式、腿式、履带式、夹爪式等种类。其中轮式爬行机构运动效率高,但仅能适应表面连续的杆状体,对于绝缘子这类表面形状复杂的对象难以爬行。腿式爬行机构是一种仿生机构,存在结构复杂,环境适应性差等缺点。履带式可以克服轮式爬行机构的缺点,但一般情况下其调节能力差,对于被爬行对象稍有弯曲、凸起等情形难以适应。夹爪式行走机构一般也是蠕动式机构,具有蠕动式机构的特点。
因此,开发一种具有运动效率高、运动速度快、结构简单、适应能力强的爬行机构,成为制约爬行机器人能否具有实用价值的关键技术之一。
发明内容
针对上述问题,本发明的目的在于提供一种自动适应绝缘子形状的爬行机构,以克服现有爬行机构的缺陷,可简单、高效、快捷地实现在各种材质的绝缘子串上或杆类结构上的爬行动作。
为了实现上述目的,本发明采用以下技术方案:
一种自动适应绝缘子形状的爬行机构,包括第一框架、第二框架、开合电机组件、导向杆组件、第一夹紧机构、第二夹紧机构及平移驱动机构,其中第一框架和第二框架平行设置,并且通过多个导向杆组件连接,所述平移驱动机构设置于所述第二框架上,并且输出端与所述第一框架连接;所述开合电机组件设置于所述第一框架或第二框架上,用于驱动所述第一框架和第二框架同步张开或闭合;所述第一夹紧机构和第二夹紧机构分别设置于所述第一框架和所述第二框架上,用于夹紧绝缘子。
所述第一框架和所述第二框架结构相同,均包括第一弧形框和第二弧形框,所述第一弧形框和所述第二弧形框的一端通过铰轴铰接,另一端之间设有开口;
所述开合电机组件设置于所述第一框架上,并且输出端与所述铰轴连接,所述开合电机组件可驱动所述第二弧形框转动。
所述第二弧形框的周长小于所述第一弧形框的周长。
所述第一框架和所述第二框架的内侧沿周向布设有多个环抱导轨,各所述环抱导轨沿竖直方向设置。
所述第一夹紧机构和第二夹紧机构结构相同,均包括驱动拉紧电机组件、钢丝绳及多个压紧导杆组件;
所述第一夹紧机构中,多个压紧导杆组件沿周向分布,并且各所述压紧导杆组件沿径向可滑动地与所述第一框架连接,所述驱动拉紧电机组件设置于所述第一框架的一端,所述钢丝绳的一端缠绕于所述驱动拉紧电机组件的卷轴上,另一端依次经过各所述压紧导杆组件后固定于所述第一框架的另一端;
所述第二夹紧机构中,多个压紧导杆组件沿周向分布,并且各所述压紧导杆组件沿径向可滑动地与所述第二框架连接,所述驱动拉紧电机组件设置于所述第二框架的一端,所述钢丝绳的一端缠绕于所述驱动拉紧电机组件的卷轴上,另一端依次经过各所述压紧导杆组件后固定于所述第二框架的另一端。
所述压紧导杆组件包括钢丝绳滚轮、压紧弹簧及压紧导杆,其中压紧导杆与所述第一框架或所述第二框架可沿径向滑动地连接,所述钢丝绳滚轮可转动地设置于所述压紧导杆的外侧端设有的支座上,用于对所述钢丝绳进行导向;所述压紧弹簧套设于所述压紧导杆上,且两端分别与所述支座和所述第一框架或所述第二框架抵接;所述压紧导杆的内侧端用于夹紧绝缘子。
所述平移驱动机构为电动推杆组件,所述电动推杆组件包括下铰座、电动推杆及上铰座,其中上铰座和下铰座分别设置于所述第一框架和所述第二框架上,所述电动推杆的尾部与下铰座铰接,输出端与上铰座铰接;所述电动推杆驱动所述第一框架沿所述导向杆组件平移。
本发明的优点及有益效果是:本发明具有驱动电机少、运动平稳、对绝缘子或杆类结构的轮廓形状适应性强的特点,可简单、高效、快捷地实现在各种材质的绝缘子串上或杆类结构上的爬行动作。
本发明的运动方向可随意前进或后退,对绝缘子串或杆类结构的姿态是竖直还是水平还是其他任意角度放置都能够适应。
本发明对杆的形状具有较大的适应性,对杆上是否有凸起或凹坑、杆在一定范围内的弯曲等都可适应,具有较好的应用推广价值。
附图说明
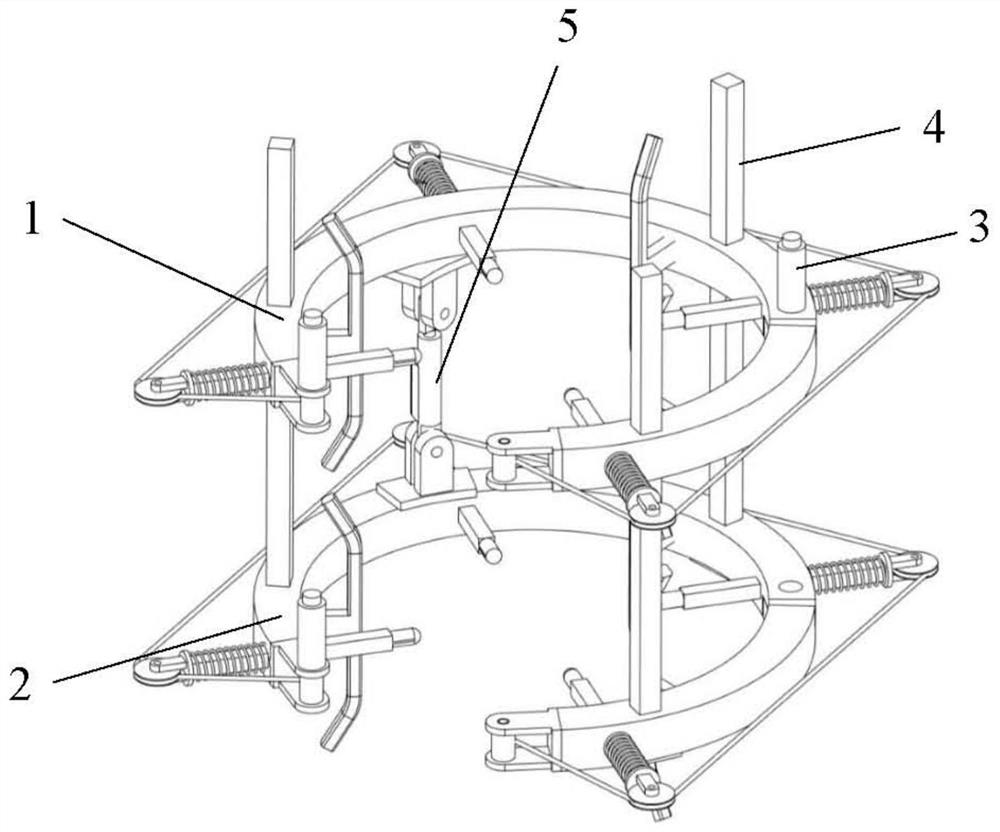
图1为本发明一种自动适应绝缘子形状的爬行机构的结构示意图;
图2为本发明的第一框架的结构示意图;
图3为本发明的压紧导杆组件的结构示意图;
图4为本发明的电动推杆组件的结构示意图。
图中:1为第一框架,2为第二框架,3为开合电机组件,4为导向杆组件,5为电动推杆组件,501为下铰座,502为电动推杆,503为上铰座,11为驱动拉紧电机组件,12为钢丝绳,13为压紧导杆组件,131为钢丝绳滚轮,132为压紧弹簧,133为压紧导杆,14为第一弧形框,15为第二弧形框,16为环抱导轨,17为钢丝绳固定端。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1所示,本发明提供的一种自动适应绝缘子形状的爬行机构,包括第一框架1、第二框架2、开合电机组件3、导向杆组件4、第一夹紧机构、第二夹紧机构及平移驱动机构,其中第一框架1和第二框架2平行设置,并且通过多个导向杆组件4连接,平移驱动机构设置于第二框架2上,并且输出端与第一框架1连接,平移驱动机构可驱动第一框架1沿导向杆组件4上下平移;开合电机组件3设置于第一框架1或第二框架2上,用于驱动第一框架1和第二框架2同步张开或闭合,用于环抱绝缘子;第一夹紧机构和第二夹紧机构分别设置于第一框架1和第二框架2上,用于夹紧绝缘子。
如图2所示,本发明的实施例中,第一框架1和第二框架2结构相同,均包括第一弧形框14和第二弧形框15,第一弧形框14和第二弧形框15的一端通过铰轴铰接,另一端之间设有开口;开合电机组件3设置于第一框架1上,并且输出端与铰轴连接,开合电机组件3可驱动铰轴及第二弧形框15转动。
进一步地,第二弧形框15的周长小于第一弧形框14的周长,从而方便第二弧形框15的打开或闭合。
如图1-2所示,在上述实施例的基础上,第一框架1和第二框架2的内侧沿周向布设有多个环抱导轨16,各环抱导轨16沿竖直方向设置。环抱导轨16用于环抱时,压在绝缘子的表面且使第一框架1和第二框架2沿导向杆组件4平移推进或缩回时均能沿绝缘子的轴线方向而不会偏转。
如图2所示,本发明的实施例中,第一夹紧机构和第二夹紧机构结构相同,均包括驱动拉紧电机组件11、钢丝绳12及多个压紧导杆组件13;
在第一夹紧机构中,多个压紧导杆组件13沿周向分布,并且各压紧导杆组件13沿径向可滑动地与第一框架1连接,驱动拉紧电机组件11设置于第一框架1的一端,钢丝绳12的一端缠绕于驱动拉紧电机组件11的卷轴上,另一端依次经过各压紧导杆组件13后固定于第一框架1另一端的钢丝绳固定端17上;在第二夹紧机构中,多个压紧导杆组件13沿周向分布,并且各压紧导杆组件13沿径向可滑动地与第二框架2连接,驱动拉紧电机组件11设置于第二框架2的一端,钢丝绳12的一端缠绕于驱动拉紧电机组件11的卷轴上,另一端依次经过各压紧导杆组件13后固定于第二框架2的另一端的钢丝绳固定端17上。
工作时,钢丝绳12在驱动拉紧电机组件11的缠绕运动下实现在驱动拉紧电机组件11的卷轴上的拉紧缠绕或松开。
如图3所示,本发明的实施例中,压紧导杆组件13包括钢丝绳滚轮131、压紧弹簧132及压紧导杆133,其中压紧导杆133与第一框架1或第二框架2可沿径向滑动地连接,钢丝绳滚轮131可转动地设置于压紧导杆133的外侧端设有的支座上,用于对钢丝绳12进行导向;压紧弹簧132套设于压紧导杆133上,压紧弹簧132的一端支座抵接,另一端与第一框架1或第二框架2抵接;压紧导杆133的内侧端用于夹紧绝缘子。
本实施例中,当钢丝绳滚轮131受到钢丝绳12的压迫时,压紧弹簧132被压缩,从而压紧导杆133向爬行机构的中心运动,最终实现在绝缘子表面的压紧;当钢丝绳12松开时,压紧弹簧132在其回弹力的作用下,带动钢丝绳滚轮131和压紧导杆133一起运动,松开绝缘子。
如图4所示,本发明的实施例中,平移驱动机构为电动推杆组件5,电动推杆组件5包括下铰座501、电动推杆502及上铰座503,其中上铰座503和下铰座501分别设置于第一框架1和第二框架2上,电动推杆502的尾部与下铰座501铰接,输出端与上铰座503铰接。具体地,第二框架2与导向杆组件4的下端固定连接,第一框架1与导向杆组件4滑动连接,电动推杆502可驱动第一框架1沿导向杆组件4平移推进或缩回。
在爬行之前,第一框架1和第二框架2是张开的,以便于将本爬行机构放到杆上或从杆上取下,而整个爬行机构处于在绝缘子串上的工作状态时,开合电机组件3带动第一框架1和第二框架2的两个弧形部分处于闭合状态,以保证爬行机构始终环抱在绝缘子串上。
本发明提供的一种自动适应绝缘子形状的爬行机构,第一框架和第二框架通过交替的压紧和松开绝缘子,并在电动推杆的伸缩下,实现整个机构在绝缘子串上的爬行。该爬行机构具有驱动电机少、运动平稳、对绝缘子或杆类结构的轮廓形状适应性强的特点,可简单、高效、快捷地实现在各种材质的绝缘子串上或杆类结构上的爬行动作,具有较好的应用和推广前景。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
- 一种自动适应绝缘子形状的爬行机构
- 自动适应绝缘子形状的爬行机构