一种快速出水的跨介质飞行器及其出水控制方法
文献发布时间:2023-06-19 12:02:28
技术领域
本申请属于无人机技术领域,具体涉及一种快速出水的跨介质飞行器及其出水控制方法。
背景技术
跨介质飞行器将空中飞行器、水面航行器和水下潜航器三种无人工作系统集成一体,在单一平台上就可以同时具备空中飞行、水面航行和水下潜航三种功能。该平台不仅机动灵活,也能更好地适应各种环境条件,具有一定通用性和隐蔽性。
跨介质飞行器突破了传统单一介质无人系统平台的局限性,它既有水面飞行器的飞行特点,又有水下航行器的潜行特点,因而具备极佳的环境适应性。同时也能够有效利用各种探测设备的盲区,快速、隐蔽地突破目标防御系统,高效便捷地执行远程侦察、打击等任务。
由于水和空气密度相差800倍左右,其流体力学性质相差极大,跨介质飞行器在出水过程中要自重影响,并且出水姿态要求稳定,否则在波动的水面容易发生倾覆。因此跨介质飞机出水的姿态稳定控制成为桎梏跨介质飞行器发展的一大难题,急需解决。
发明内容
为解决上述技术问题,本发明提供一种快速出水的跨介质飞行器及其出水控制方法,采用多旋翼结构,配合尺寸设计和动力设计,能够快速、稳定出水。
实现本发明目的所采用的技术方案为,一种快速出水的跨介质飞行器,所述跨介质飞行器为多旋翼结构,所述旋翼的数量N为偶数,且N≥4;所述跨介质飞行器的动力系统包括n*N个动力单元,n为正整数,各所述旋翼上均安装n个所述动力单元,所述动力单元包括螺旋桨和用于驱动螺旋桨的电机,所述动力系统中各电机的总功率P≥3P1,P1为所述跨介质飞行器在悬停状态下所需的动力系统中各电机的总功率;所述跨介质飞行器的水平尺寸t与待进出水域的波浪的波长λ满足:t≥4λ或t≤0.25λ。
可选的,所述螺旋桨的直径D和螺距p满足:D1≤D≤D2,p1≤p≤p2,其中D1和p1分别为相同推力、相同流体介质密度和相同螺旋桨转速的条件下,船用螺旋桨的对应直径和对应螺距;D2和p2分别为相同推力、相同流体介质密度和相同螺旋桨转速的条件下,飞机用螺旋桨的对应直径和对应螺距。
可选的,所述螺旋桨的直径D为6~8英寸,所述螺旋桨的螺距p<D;所述电机为大扭矩无刷电机,所述大扭矩无刷电机的扭矩范围是0.1~10N·m。
可选的,所述螺旋桨的桨叶具有翼梢小翼,所述翼梢小翼的倾斜角为10°~30°,所述翼梢小翼的安装角为-40°~0°。
可选的,所述跨介质飞行器的水平尺寸t与待进出水域的波浪的波长λ满足:t≥10λ或t≤0.1λ。
可选的,所述跨介质飞行器的水平尺寸t为对角中心距。
可选的,所述跨介质飞行器的信号电线路以及电路板上均包覆有密封胶。
可选的,所述跨介质飞行器的动力电线路的导线规格为18AWG以上;所述动力电线路的接头处涂覆有保护层。
可选的,所述跨介质飞行器的机械运动部件的缝隙中涂覆有润滑脂。
基于同样的发明构思,本发明还对应提供了一种应用于上述的快速出水的跨介质飞行器的出水控制方法,采用动力式出水控制策略,调整所述动力系统中电机和螺旋桨的参数,以使所述动力单元在空中时的推力小于在水中时的推力,控制所述动力系统的电机同时转动,以使所述跨介质飞行器逐渐靠近水面,直至所述跨介质飞行器出水。
由上述技术方案可知,本发明提供的快速出水的跨介质飞行器,整机多旋翼结构,旋翼的数量N为偶数,且N≥4,保证动力系统工作时不会产生自旋扭矩。对应的动力系统包括n*N个动力单元,n为正整数,各旋翼上均安装n个动力单元,动力单元包括螺旋桨和用于驱动螺旋桨的电机,动力系统中各电机的总功率P不小于3倍的悬停功率,提供尽可能强的出水动力,缩短其出水时间至1s内。跨介质飞行器的水平尺寸t与待进出水域的波浪的波长λ满足:t≥4λ或t≤0.25λ,即跨介质飞行器的尺寸设计为远小于当地波浪的波长,或远大于当地波浪的波长。
对于跨介质飞行器,出水过程的姿态稳定控制是控制难点,本发明提供的快速出水的跨介质飞行器,一方面通过将跨介质飞行器的尺寸设计为远小于当地波浪的波长,或远大于当地波浪的波长,使得波动的水面相对于跨介质飞行器近似为平面;另一方面通过设置动力系统中各电机的总功率P不小于3倍的悬停功率,提供尽可能强的出水动力,缩短其出水时间至1s内,能够在水面未发生明显变化的极短时间内出水。通过以上两方面共同解决水面波动对跨介质飞行器的稳定出水造成的严重影响,出水可靠性可达99.8%以上。
本发明将多旋翼无人机应用于跨介质飞行领域,多旋翼无人机属于目前较为成熟的技术,实施难度小,由于多旋翼无人机具有多个动力,可以采用动力式出水控制策略,对于电机的控制可以采用多动力差速式控制方案。调整动力系统中电机和螺旋桨的参数,以使动力单元在空中时的推力小于在水中时的推力,控制动力系统的电机同时转动,以使跨介质飞行器逐渐靠近水面直至出水。
本发明提供的快速出水的跨介质飞行器在水中或者水面时,整机受多个力:重力、浮力和若干电机的拉力;整机受n*N个力矩,即电机反扭带来的力矩。多旋翼布局的无人机,整机结构对称,因此重心位于飞机的中心。一般跨介质无人机整机密度相对于水来说较大,相比于其他作用力,浮力为非重要影响因素。因此各个电机的拉力差是使该多旋翼无人机俯仰横滚操纵的力矩的来源。各个电机的力矩差是使该多旋翼无人机偏航操纵的力矩的来源。
由于本发明提供的跨介质飞行器中,动力单元在空中时的推力小于在水中时的推力,即使跨介质飞行器在水面上的姿态是不平稳的,由于不平稳的姿态导致必有一个较高位置的电机带动旋转的螺旋桨首先出离水面,该电机离开水介质后,受到水和空气密度差的影响,浮力和螺旋桨拉力均瞬间减小,由此使得该机臂受到一个力矩作用,有向下运动并恢复平衡的趋势。此时未离开水面的其他三个电机由于仍处于水中,电机拉力大于离开水面的电机的拉力,使得处于水中的三个机臂也受到一个力矩作用,有向上运动并恢复平衡的趋势。叠加这两种分析所得的运动方式,飞行器最终将趋于姿态平稳并逐渐离开水面。
与现有技术相比,本发明具有如下优点:
1、本发明提供的快速出水的跨介质飞行器,采用多旋翼结构,规避固定翼布局的固有矛盾,有效提高了跨介质飞行器对两种工作环境的兼容性,能够快速出水。
2、本发明提供的快速出水的跨介质飞行器,通过设计跨介质飞行器的尺寸远小于或远大于当地波浪的波长,以及设置动力系统中各电机的总功率P不小于3倍的悬停功率,共同解决水面波动对跨介质飞行器的稳定出水造成的严重影响,出水速度可缩短至1s内,出水可靠性可达99.8%以上。
3、本发明提供的出水控制方法,采用动力式出水控制策略,出水过程全程可控,且在出水过程中跨介质飞行器可自动修正自身姿态,保证姿态平稳,避免发生倾覆。
附图说明
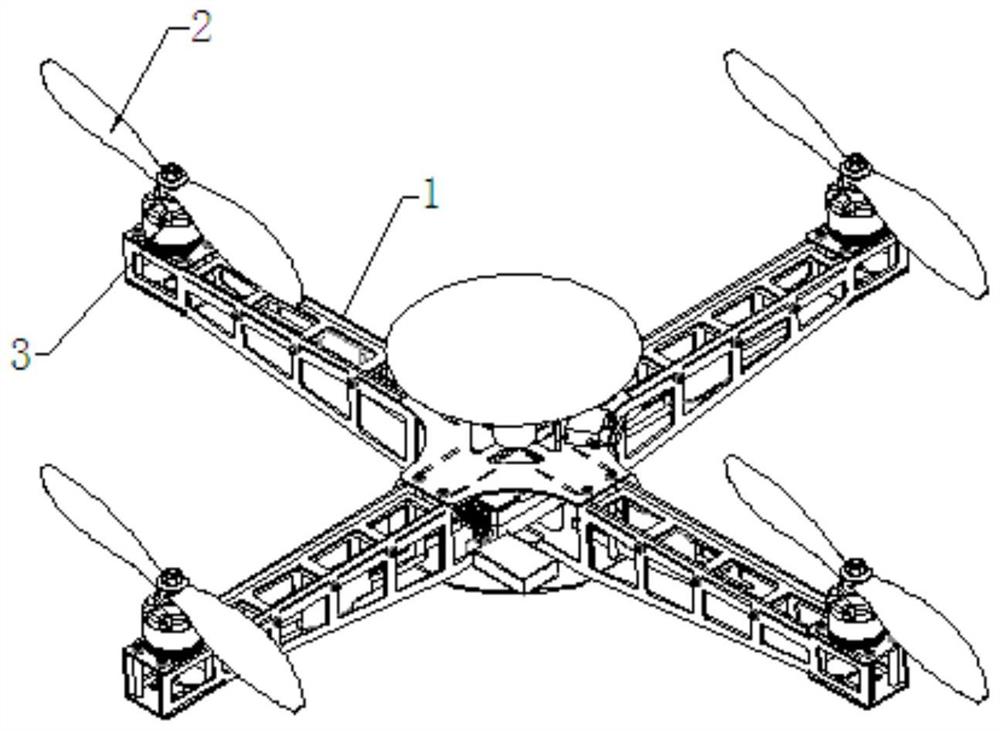
图1为本发明实施例中快速出水的跨介质飞行器的结构示意图;
图2为图1的快速出水的跨介质飞行器中动力系统桨叶的结构示意图;
附图标记说明:1-旋翼,2-螺旋桨,3-电机,4-桨叶,41-翼梢小翼。
具体实施方式
为了使本申请所属技术领域中的技术人员更清楚地理解本申请,下面结合附图,通过具体实施例对本申请技术方案作详细描述。
由于水和空气密度相差800倍左右,其流体力学性质相差极大,跨介质飞行器在出水过程中要自重影响,并且出水姿态要求稳定,否则在波动的水面容易发生倾覆。
如是在静水中进行出水操作,由于水面平稳,所有的电机工作状态类似,能够做到同时出水,但是实际使用中几乎不存在平整的水面,如果水面有波动,跨介质飞行器在波动的水中,螺旋桨可能会产生一种新的状态,即桨盘的一部分浸入水中,而另一部分在空气中。此时螺旋桨的转速与在水中的转速相差不大,但是产生的推力没有水中大。由于水空密度相差约800倍,因此其他所有工作条件都一致的螺旋桨,在水中的推力是在空气中的约800倍。由于桨盘浸入水中的面积从0到100%都是有可能的,因此无法对这种状态下的螺旋桨推力进行量化,使得波动的水面会对跨介质飞行器的稳定出水造成严重影响,导致跨介质飞行器出水时倾覆,无法出水。
上述原因导致跨介质飞机出水的姿态稳定控制是十分难以解决。
为了上述技术问题,本发明提出一种设计思路,将多旋翼无人机应用于跨介质飞行领域,多旋翼无人机属于目前较为成熟的技术,实施难度小,由于多旋翼无人机具有多个动力单元,并且飞行过程全程可控,因此可采用动力式出水方式,通过尺寸设计和动力系统功率设计,共同解决水面波动对稳定出水造成的严重影响。
下面结合具体实施例对本发明的技术方案进行详细介绍:
实施例1:
本实施例提供一种快速出水的跨介质飞行器,参见图1,跨介质飞行器为多旋翼结构,旋翼1的数量N为偶数,且N≥4,例如四旋翼、六旋翼、八旋翼等。跨介质飞行器的动力系统包括n*N个动力单元,n为正整数,各旋翼1上均安装n个动力单元,例如六旋翼无人机,每个旋翼均配置双动力,则动力单元共12个。动力单元的偶数设计保证动力系统工作时不会产生自旋扭矩。
动力单元包括螺旋桨2和用于驱动螺旋桨2的电机3,动力系统中各电机的总功率P≥3P1,P1为跨介质飞行器在悬停状态下所需的动力系统中各电机的总功率,也称悬停功率。由于动力系统的总功率一般是平均分配至各个电机上,因此也可理解为单个电机的功率p≥3p1,p1为该电机的悬停功率,可直接查询得到。设置动力系统总功率P不小于3倍的悬停功率,使得动力系统能够提供尽可能强的出水动力,缩短其出水时间至1s内,能够在水面未发生明显变化的极短时间内出水。
对于整机,跨介质飞行器的水平尺寸t与待进出水域的波浪的波长λ满足:t≥4λ或t≤0.25λ,即跨介质飞行器的尺寸设计为远小于当地波浪的波长,或远大于当地波浪的波长,使得波动的水面相对于跨介质飞行器近似为平面。
作为优选方案,跨介质飞行器的水平尺寸t与待进出水域的波浪的波长λ应满足:t≥10λ或t≤0.1λ。也即跨介质飞行器的水平尺寸t与待进出水域的波浪的波长λ之间的相差一个数量级。本实施例中,该跨介质飞行器的水平尺寸t为对角中心距,即位于对角的两个螺旋桨的中心距。
当然,在其他实施例中,也可将任意两个螺旋桨的中心距作为该跨介质飞行器的水平尺寸t,以最为通用的四旋翼结构为例,任意两个螺旋桨可以是同一侧边的两个螺旋桨或者对角的两个螺旋桨,相应的任意两个螺旋桨的中心距可以是同一侧边的两个螺旋桨的中心距,也可以是对角的两个螺旋桨的中心距。
在其他实施例中,还可以将任意两个螺旋桨的桨盘边缘的距离作为跨介质飞行器的水平尺寸t,同样以最为通用的四旋翼结构为例,任意两个螺旋桨的定义同上,此处不再赘述。两个螺旋桨的桨盘边缘是指螺旋桨桨盘上任意一点与另一螺旋桨桨盘上任意一点的距离,该距离随着点选取的不同而不同,当选择最外侧的两个象限点时,两个螺旋桨的桨盘边缘的距离最大,当选择最内侧的两个象限点时,两个螺旋桨的桨盘边缘的距离最小。对于跨介质飞行器的水平尺寸t与待进出水域的波浪的波长λ之间的相差一个数量级或以上的情况,可将上述任一种间距作为跨介质飞行器的水平尺寸t,不同间距形式的选择对于跨介质飞行器稳定性的影响可忽略不计。
本发明的跨介质飞行器中,动力单元包括螺旋桨和用于驱动螺旋桨的电机,由于要进行跨介质作业,螺旋桨2的直径D和螺距p满足:D1≤D≤D2,p1≤p≤p2,其中D1和p1分别为相同推力、相同流体介质密度和相同螺旋桨转速的条件下,船用螺旋桨的对应直径和对应螺距;D2和p2分别为相同推力、相同流体介质密度和相同螺旋桨转速的条件下,飞机用螺旋桨的对应直径和对应螺距。这样可以使这套动力在水中和空气中都能提供稳定的动力输出。在水中电机输出高扭矩,转速较低;在空气中电机输出低扭矩,转速较高。
具体的,螺旋桨2的直径D为6~8英寸,螺旋桨的螺距p<D,本实施例中螺距p为3.8~4.0英寸。整机对角轴距在250~550mm之间,起飞重量为0.5~2Kg。以起飞重量1.4Kg为例,本实施例提供的跨介质飞行器的对角轴距仅450mm,而同重量的固定翼无人机通常翼展超过600mm,因此相比于同样重量的固定翼式跨介质飞行器,整机尺寸较小。电机3采用大扭矩电机,其输出的扭矩范围是0.1~10N·m,本实施例中电机的扭矩在0.5~10N·m范围内,优选在飞机用螺旋桨对应电机的输出扭矩的两倍以上,例如对于一确定参数的飞机用螺旋桨,与之匹配的电机的扭矩为a,则本实施例中电机的扭矩应大于等于2a,具体数值根据实际使用需求而确定。对于电机的选型,本实施例具体采用无刷电机,大扭矩无刷电机能耐受较大电流,同时适应水与空气两种介质。且在水中工作时,电机可直接通过水介质散热,效率更高,也能降低损坏概率。
参见图2,本实施例中,螺旋桨2的桨叶4具有翼梢小翼41,翼梢小翼41与桨叶4呈角度设置,翼梢小翼41的具体参数如下:a)倾斜角为10°~30°,翼梢小翼的弦平面与地平面之间的夹角定义为倾斜角,本实施例中倾斜角度取15°~20°;b)安装角为-40°~0°,翼梢小翼的安装角是指其根弦与机翼翼尖弦之间的夹角。其安装角一般为负值.即小翼的前缘向外,也称外撇角,本实施例中安装角度取-20°~0°。采用带有翼梢小翼41的小直径螺旋桨,改善了气动性能和动力学特性,能有效减少水中潜行时产生的诱导阻力,提高了效率;并减少了扰流对螺旋桨翼梢的影响,提高了控制性能以及飞行器在水下航行和跨介质过程中的稳定性。
由于本发明提供的跨介质飞行器需要在水下航行,防水处理绝对不能忽视。对于外形封闭的潜航器来说,通常对机体做增压处理,来抵抗水下的压力,同时也能具有良好的密封性能防止渗水来保证电子设备的安全。而空中飞行器一般只有一层薄蒙皮来维持气动外形,并不能承受水下压力。同时很多仪器设备不能直接暴露在水下环境中,防水处理将会是一大难题。一般的解决方式是加装密封外壳,但又带来了额外重量,不利于空中飞行。
本实施例中,为了权衡防水性能以及防水措施所带来的其他麻烦,采用物理隔绝的方法,主要处理电路防水以及机械运动部件的防水。
全机电路中主要分为电流较小的信号电和电流较大的动力电,涉及信号电的电元件主要为信号电线路以及电路板,涉及动力电的电元件主要为动力电线路以及动力元件。本实施例中,跨介质飞行器的信号电线路以及电路板上均包覆有密封胶。跨介质飞行器的动力电线路的导线规格为18AWG以上;动力电线路的接头处涂覆有保护层。跨介质飞行器的机械运动部件的缝隙中涂覆有润滑脂。
具体的,对于信号电,所有导线全部用液态硅胶密封后冷凝固化,形成一层致密的保护面。硅胶是一种高活性吸附材料,属非晶态物质,其化学分子式为mSiO
对于所有的电路板,如飞行控制芯片和电子调速器等,也均使用硅胶凝固密封,如此在重量和防水性之间权衡了一个折中方案。电路板的表体具有很多暴露的导线金属线头,在通过硅胶进行涂覆之前需要测试电路板的导电性能是否正常,然后将硅胶均匀涂覆于电路板的外表面,硅胶凝固后应当再次测试电路板能否正常工作,若正常则可投入安装使用,若发生短路或者电路断通,则需要重新检查电路板的局部通电情况。
对于动力电,由于其电流大、电压高,只要采用了电阻小的高质量导线,即使接头完全暴露在水中,电流也会因为水流电阻较大而只从导线中流过,因此只对动力电的接头部分做简单密封处理即可。20℃时,铜的电阻率约为1.85*10
由于本发明的跨介质飞行器工作时需要与水接触,例如在海水中作业,动力电线路不可避免有一部分暴露在海水中,则需要考虑海水对导线、接插件的电化学腐蚀。本实施例中,接头、接插件等暴露于外的导线采用镀金的方式来避免锈蚀,当然也可采用上述的硅胶凝固密封。
对于机上的其他机械运动部件,如舵机等,在其齿轮缝隙涂满具有优良防水性能的润滑脂即可,本实施例中采用锂基润滑脂,具体是含有12-羟基硬脂酸的锂基润滑脂。12-羟基硬脂酸对矿油或合成油的稠化能力都比较强,因此,锂基润滑脂与钙钠基润滑脂相比,稠化剂量可以降低约1/3,而使用寿命可以延长一倍以上,加有抗氧化剂、防锈剂和极压剂之后,就成为多效长寿命通用润滑脂,可以代替钙基润滑脂和钠基润滑脂,通用锂基润滑脂(GB7324-1994)按稠度等级分为1#、2#、3#。12-羟基硬脂酸具有良好的抗水性、机械安定性、防腐蚀性和氧化安定性,应用于本发明的跨介质飞行器的涂覆中,具有良好的防腐蚀性能。12-羟基硬脂酸极强的疏水性,能有效保护舵机不受水流影响,正常工作。
除舵机外,锂基润滑脂还可涂刷在所述机械组件的连接构件上所述连接构件包含连接跨介质飞行器上个零部件的连接件,具体包含但不限于螺栓、以及卡接构件等容易发生锈蚀的金属制品。
本实施例的快速出水的跨介质飞行器中,其他未详述结构均可参照现有技术的相关公开,本发明不做展开说明。
实施例2:
基于同样的发明构思,本实施例提供一种应用于上述快速出水的跨介质飞行器的出水控制方法,采用动力式出水控制策略,调整动力系统中电机和螺旋桨的参数,以使动力单元在空中时的推力小于在水中时的推力,控制动力系统的电机同时转动,以使跨介质飞行器逐渐靠近水面,直至跨介质飞行器出水,出水时加速,增加动能,靠惯性提高出水成功率。
在动力系统的控制方式上,基础的控制方案只有三种,分别是陀螺进动式、多电机差速式和舵面式。目前所有的飞机、船、潜航器的控制方案都是使用这三种方式,或者是几种方式的组合。陀螺进动式常用于直升机,表现为周期变距。多动力差速式常用于多旋翼飞行器。舵面式常用于固定翼飞机和船、潜航器,表现为舵面。由于飞机螺旋桨在水和空气中转速相差极大,且在水中转速非常低,因此不能使用陀螺进动式,因为控制力矩受转速影响很大。由于飞机在水中和空气中的飞行速度相差很大,因此不能使用舵面式,因为控制力矩受流体流速影响很大,特别是出水瞬间,飞机的速度接近水中速度,而飞机处在空气介质中,此时舵面几乎不能提供操纵力矩。因此选用多动力差速式。多旋翼无人机的多动力差动式控制方案为成熟的现有技术,具体内容可参考现有技术的相关公开,本发明不做展开说明。
多动力差速式在水下状态和在空气状态下,由于所有的电机工作状态都是类似的,因此在调速范围内具备足够且可控的控制力矩。因此如果所有的电机能够做到同时出入水,那么出水控制是没有问题的。
假设跨介质飞行器是有一部分电机在空中,一部分电机在水下。由于本发明提供的跨介质飞行器的出水控制方法,通过调整动力系统中电机和螺旋桨的参数,以使动力单元在空中时的推力小于在水中时的推力,即使跨介质飞行器在水面上的姿态是不平稳的,由于不平稳的姿态导致必有一个较高位置的电机带动旋转的螺旋桨首先出离水面,该电机离开水介质后,受到水和空气密度差的影响,浮力和螺旋桨拉力均瞬间减小,由此使得该机臂受到一个力矩作用,有向下运动并恢复平衡的趋势。此时未离开水面的其他三个电机由于仍处于水中,电机拉力大于离开水面的电机的拉力,使得处于水中的三个机臂也受到一个力矩作用,有向上运动并恢复平衡的趋势。叠加这两种分析所得的运动方式,飞行器最终将趋于姿态平稳并逐渐离开水面。由于水的密度是空气的800倍,因此使同一套电机螺旋桨组合在水下的推力高于在空中的推力是可以实现的。
尽管已描述了本申请的优选实施例,但本领域内的普通技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本申请范围的所有变更和修改。
显然,本领域的技术人员可以对本申请进行各种改动和变型而不脱离本申请的精神和范围。这样,倘若本申请的这些修改和变型属于本申请权利要求及其等同技术的范围之内,则本申请也意图包含这些改动和变型在内。
- 一种快速出水的跨介质飞行器及其出水控制方法
- 一种快速入水的跨介质飞行器及其入水控制方法