一种基于伺服电机的电子多臂控制方法
文献发布时间:2023-06-23 06:30:03
技术领域
本发明涉及织机技术领域,特别涉及一种基于伺服电机的电子多臂控制方法。
背景技术
电子多臂是实现织机开口运动的一种装置,实现综框运动的电子多臂的信号来源于电磁铁的得失电,现有的电子多臂动力源来源织机,通过同步齿形带传动,同步调整还需张力调整以及跑偏调整,并设有安全防护措施,经一对锥齿轮方向转换,再经过差动机构,将匀速圆周运动转换成固定的非匀速圆周运动,这一套机构存在结构复杂,精度需求高,加工难度大,适用面窄,温升高以及保全用时多等缺点。
发明内容
针对现有技术存在的不足,本发明的主要目的在于提供一种与机械结构性能相同,结构简单,成本减低,动作可靠性得到加强的基于伺服电机的电子多臂控制方法。
为实现上述目的,本发明提供了如下技术方案:一种基于伺服电机的电子多臂控制方法,其控制方法包括如下步骤:
(1)、伺服电机通过联轴器与织机的偏心轮轴连接;
(2)、织机和伺服电机共用同一编码器,使得伺服电机与织机平综时同步;
(3)、伺服电机在每个开口周期内作出与机械差动一样的非匀速圆周运动,即伺服电机作曲线运动,通过每片综框静止角及闭口角的相互组合来达到综框的运动规律。
优选的,所述伺服电机与织机的速比为1:2。
优选的,所述织机的所有综框由一台伺服电机驱动。
本发明相对于现有技术具有如下优点,本方案现改进为用伺服电机直接与偏心轮轴相连,让伺服电机与织机平综时同步,并在一圈中实现与机械差动一样的非匀速圆周运动。性能相同,结构简单,成本减低,动作可靠性得到加强。将电子多臂动力传输及防护机构,传动机构和差动机构全费除,取代为司服电机直接驱动,电控上保证织机同步,在一个开口周期,任何时段速度可以变化,满足引纬需求,让开口量在合理范围内,使织机能耗更低,织机速度更高。机械零件制作难度大大降低。
动力消耗少,可靠性和稳定性得到加强,适应性得到提高,温升得到了降低,噪音得到进一步控制,保全用时大大减少,智能化得到加强,成本得到减少,机器制造难度得到降低。
附图说明
图1为现有技术中电子多臂的结构示意图;
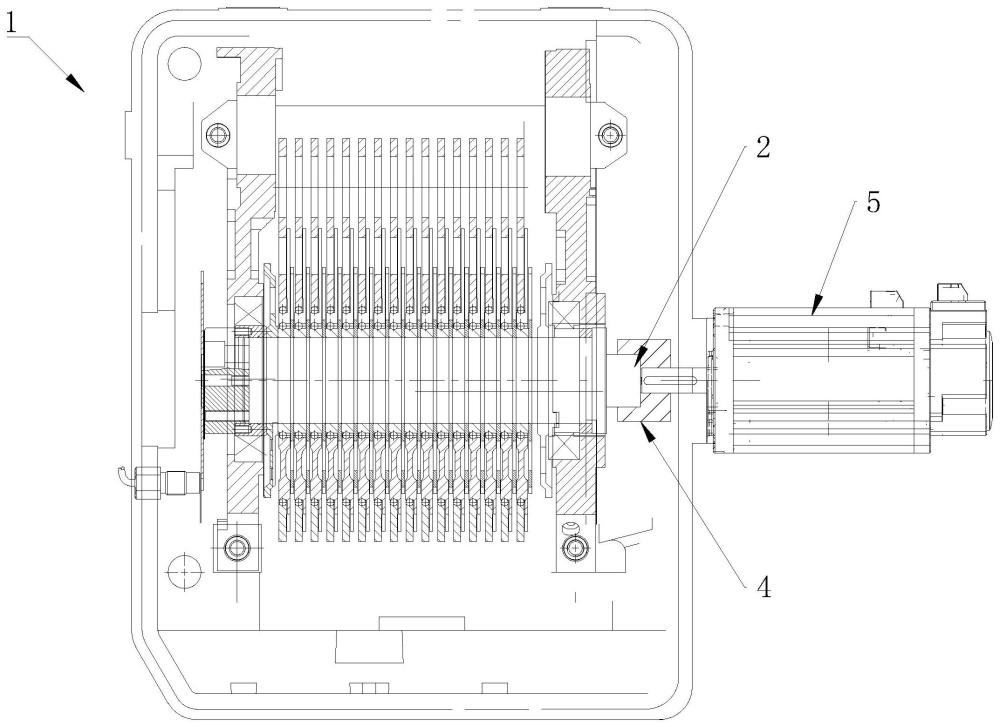
图2为本发明的基于伺服电机的电子多臂的结构示意图;
图3为以织机600rpm为例的伺服电机时许图。
图中:1、织机;2、偏心轮轴;3、差动机构和驱动机构;4、联轴器;5、伺服电机。
实施方式
下面结合附图对本发明作进一步说明。
如图1所示,一种基于伺服电机5的电子多臂控制方法,其控制方法包括如下步骤:
(1)、伺服电机5通过联轴器4与织机1的偏心轮轴2连接;
(2)、织机1和伺服电机5共用同一编码器,使得伺服电机5与织机1平综时同步;
(3)、伺服电机5在每个开口周期内作出与机械差动一样的非匀速圆周运动,即伺服电机5作曲线运动,通过每片综框静止角及闭口角的相互组合来达到综框的运动规律。
优选的,所述伺服电机5与织机1的速比为1:2。
优选的,所述织机1的每个综框均由单独的伺服电机5驱动。
因为现有技术中电子多臂装置利用织机1作为动力源,由织机1皮带轮外接织机1侧同步带轮,通过同步带来实现织机1与多臂1:1的精确同步转动,多臂侧同步带轮将运动传递给箱体内部,驱动轴通过一对螺旋锥齿轮,以1:2的速比,使大锥齿轮座作匀速转动。再通过差动机构的转换,使偏心轮2轴作有停顿的非匀速运动。本方案现改进为用伺服电机5直接与偏心轮轴2轴相连,让伺服电机5与织机1平综时同步,并在一圈中实现与机械差动一样的非匀速圆周运动。性能相同,结构简单,成本减低,动作可靠性得到加强。改进后电子多臂,取消差动机构,一对变向齿轮,动力传输机构及防护机构。
织机1每转两圈,伺服电机5转一圈,织机1和电子多臂臂的伺服电机5共用一处编码器,以织机1600rpm 为例 ,织机1每转一圈为100ms,电子多臂的伺服电机5每转一圈为200ms,如附图3所示。从290°到70°用时52ms,从70°到85°用时8ms,从85°到95°用时40ms,从95°到110°用时8ms,从110°到250°用时52ms,从250°到265°用时8ms,从265°到275°用时40ms,从275°到290°用时8ms.合计200ms,这样来实现非匀速运动。伺服电机5在每个开口周期内作出与机械差动一样的非匀速圆周运动,即伺服电机5作曲线运动,通过每片综框静止角及闭口角的相互组合来达到综框的运动规律。可以自由设定开口静止时间和相位角度,可做到柔性可调,适用于不同的织物品种。本方案中的伺服电机5的运动控制采用单独的控制器进行控制,其运动过程程序根据织物品种进行单独设定,本方案的重点不在于程序的开发而在于利用伺服电机5配合偏心轮轴2实现多种非匀速圆周运动方案,在一圈中实现与机械差动一样的非匀速圆周运动。性能相同,结构简单,成本减低,动作可靠性得到加强。
本方案的种基于伺服电机5的电子多臂控制方法,将电子多臂动力传输及防护机构,差动机构和驱动机构3全费除,取代为司服电机直接驱动,电控上保证织机1同步,在一个开口周期,任何时段速度可以变化,满足引纬需求,让开口量在合理范围内,使织机1能耗更低,织机1速度更高。机械零件制作难度大大降低。
动力消耗少,可靠性和稳定性得到加强,适应性得到提高,温升得到了降低,噪音得到进一步控制,保全用时大大减少,智能化得到加强,成本也减少一些,机器制造难度降低了许多。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。