提花机上摆动机构用的电动旋转驱动传动装置
文献发布时间:2024-01-17 01:21:27
【技术领域】
本发明涉及一种提花机上摆动机构用的电动旋转驱动传动装置,属于提花开口机械技术领域。
【背景技术】
请参见申请人于2022年3月15日申请的名称为矮机身低重量高稳定性提花机(申请号2022103097658),该机型采用比第一纵向摆轴41、第二纵向摆轴42均短的一条纵向转轴2,纵向转轴2的内端位于前底梁1与后底梁1’之间,提花机共用织机的动力源并通过万向立轴传动,与万向立轴其上端相连的上锥形齿轮箱布置在二块底梁之间的安装空间内,第一偏心轮31、第二偏心轮32同轴装于纵向转轴2上,活动曲柄62a活套在第一纵向摆轴41上,从动曲柄62b固定在第二纵向摆轴42上,其中,第二偏心轮32需依次通过第二横连杆52a、活动曲柄62a、第三横连杆52b和从动曲柄62b才能将运动传递至第二纵向摆轴42。
由于活动曲柄62a与第一纵向摆轴41为活动连接,并且活动曲柄62a与第二横连杆52a为铰连接,因而存在连接点以及横连杆配置数量多的不足,不但使得第二纵向摆轴42与第一纵向摆轴41同步性提升受制约,而且耗电欠节能,另外,主动固定曲柄61需设置配重体9,进一步增加了电耗;第一偏心轮31到第一纵向摆轴41的传动路线与第二偏心轮32距离第二纵向摆轴42的传动路线存在不相等的不足。
当需要增加或减少实际所用针数规格时,在现有提花机上难以实现。
【发明内容】
申请人针对背景技术述及提花机型结构存在的不足,本发明目的是提供一种提花机上摆动机构用的电动旋转驱动传动装置。
为此,本发明采用如下技术方案:
提花机上摆动机构用的电动旋转驱动传动装置,由电机、呈经向设置于机架的输入轴和连接机构组成,所述连接机构有两套,两套连接机构分别由一个偏心件、纬向布置的一个连杆和一个摆臂组成,电机和输入轴分别有两个,布置于摆动机构二侧,两个电机的输出轴分别固定连接小齿轮,两个输入轴分别固定连接大齿轮,两个小齿轮各自啮合对应的大齿轮,两个输入轴各自与摆动机构中呈经向、平行布置的相近的或者相远的一个摆轴之间通过一套连接机构传动连接,其中,在每套连接机构中,偏心件既与输入轴固定连接又与连杆的一端活动连接,连杆的另一端与固定在所述摆轴上的摆臂活动连接。
上述机架由呈纬向布置且相互平行的两块底梁和连接所述底梁的两块连接梁组成,两个电机呈对称地固定在一块底梁上。
作为优先,上述机架由呈纬向布置且相互平行的两块底梁和连接所述底梁的两块连接梁组成,两个输入轴由安装在两块底梁上的轴承支承,两个输入轴以摆动机构的两摆轴的轴线间隔中心呈等距布置。
上述设计为二套连接机构对称布置创造了必要条件,并且二输入轴通用互换性强,利于节省库存。
作为优先结构,上述两套连接机构分别由一个曲柄、一个连杆和一个摆臂组成,曲柄其轴孔套置并固定在输入轴上而其偏心轴头由安装在连杆外端的轴承支承,连杆的内端与相近或相远摆轴上固定的的摆臂铰接;两个输入轴可通用互换,两套连接机构的曲柄、连杆和摆臂分别可通用互换。
由曲柄、连杆和摆臂组成的二套连接机构中,呈完全对称化,因此互为反向往复运动全过程中达到了完美的力学平衡;有利地,用户根据生产业务需要在有限设备资源的条件下,提花机需要增加或减少实际所用针数规格(1200针~8448针)时,可相应确定并置换二组提刀的纬向长度,此时,机架、电控系统不用改动(整机不用重新就位安装),摆动机构则根据提刀的纬向长度作适应性纬向移动就位安装,并且与提刀机构重新连接,而二边的电机、输入轴、连接机构相应地等距离纬向移动就位并重新安装,从而实现了在现有针数规格的提花机上作针数增/减调整,达到了现有设备针数规格的可变性和适应性目的。
作为另一种改进结构,上述两套连接机构分别由一个偏心轮、一个连杆和一个摆臂组成,偏心轮的内孔压装在输入轴上,偏心轮由安装在连杆其大端的轴承支承,连杆的小端与相近或相远摆轴上固定的摆臂铰接;两个输入轴可通用互换,两套连接机构的偏心轮、连杆和摆臂分别可通用互换。
由偏心轮、连杆和摆臂组成的二套连接机构中,呈完全对称化,因此互为反向往复运动全过程中达到了完美的力学平衡;有利地,用户根据生产业务需要在有限设备资源的条件下,提花机需要增加或减少实际所用针数规格(1200针~8448针)时,可相应确定并置换二组提刀的纬向长度,此时,机架、电控系统不用改动(整机不用重新就位安装),摆动机构则根据提刀的纬向长度作适应性纬向移动就位安装,以及与提刀机构重新连接,而二边的电机、输入轴、连接机构相应地等距离纬向移动就位并重新安装,从而实现了在现有针数规格的提花机上作针数增/减调整,达到了现有设备针数规格的可变性和适应性目的。
本发明具有如下优点和积极效果:
采用经向设置的双侧输入轴,可将现有技术分体设计的第二、第三横连杆改进为单个连杆并且该单个连杆与现有第二、第三横连杆相比总长度可显著地缩短和/或者相当,改进后的所述连杆用于传动其中一个摆轴,逻辑分析可知,这与用来传动另一个摆轴的连杆在质量上能够实现匹配,因而可摒弃设置于现有活动曲柄上的现有配重体,并且两套连接机构的传动路线得以缩短和/或者相当,结合每套连接机构的连杆数量仅为1个,显著节省提花机运行电耗;在本发明的其中一套连接机构中,取消了现有技术设于一个纵向摆轴上的活动曲柄及该活动曲柄由于需分别铰连接第二横连杆、第三横连杆,因而可相应减少多达三个连接点,从而提升了本发明两套连接机构的同步性;配置两个输入轴后,两个输入轴通过互为反向往复运动的两套连接机构传动连接至摆动机构,不但两套连接机构的互为反向运动平衡,而且摆动机构运行平稳,有利于抑制提花机运行震动和噪音,进而节省电耗。
【附图说明】
图1是本发明的主视图(前梭口方位);
图2是本发明的俯视图;
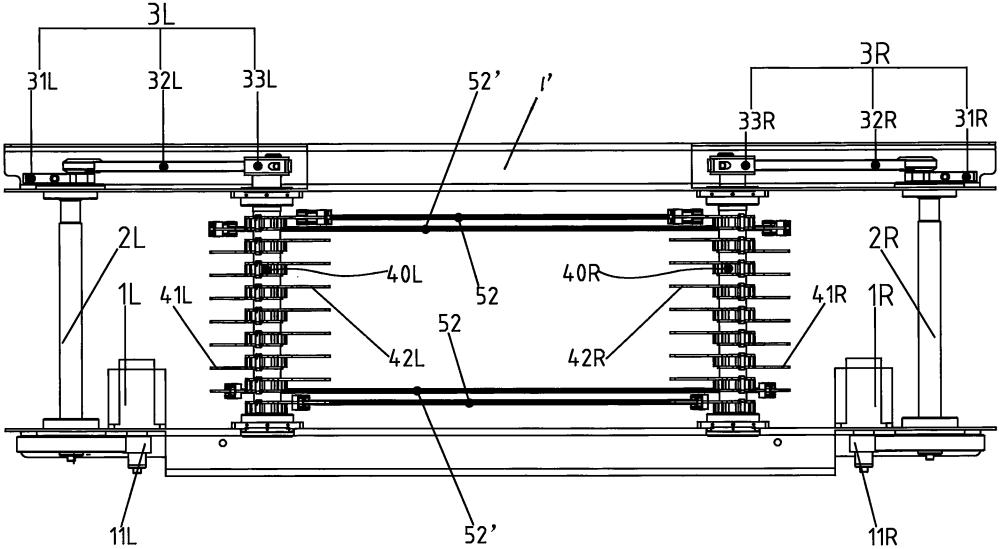
图3是本发明的后视图(后梭口方位);
图4是从前梭口方位看过去的本发明的立体图;
图5是从后梭口方位看过去的本发明的立体图;
图6是本发明的左视图;
图7是本发明的右视图;
图8是曲柄的立体图。
【具体实施方式】
参阅图1~图8所示,提花机上摆动机构用的电动旋转驱动传动装置,由电机、呈经向设置于机架的输入轴和连接机构组成,所述连接机构有两套,两套连接机构分别由一个偏心件、纬向布置的一个连杆和一个摆臂组成,电机和输入轴分别有两个,两个电机、两个输入轴的各一个布置于摆机构的其中一侧(图2中示出了电机1L、输入轴2L布置在摆动机构的左侧),两个电机、两个输入轴的各另一个布置于摆机构的另一侧(图2中示出了电机1R、输入轴2R布置在摆动机构的右侧),电机1L的输出轴固定连接小齿轮11L,电机1R的输出轴则固定连接小齿轮11R,输入轴2L固定连接大齿轮21L,输入轴2R则固定连接大齿轮21R,小齿轮11L啮合大齿轮21L以及小齿轮11R啮合大齿轮21R。小齿轮11L与大齿轮21L的减速比跟小齿轮11R与大齿轮21R的减速比相等。
输入轴2L与摆轴4L之间通过连接机构3L传动连接,以及输入轴2R与摆轴4R之间通过连接机构3R传动连接,此时二者传动路线相当并且连杆32L与连杆32R均较短因而二套连接机构的传动路线较短;当然还可以是输入轴2L与摆轴4R之间通过连接机构传动连接,以及输入轴2R与摆轴4L之间通过连接机构传动连接,彼时二者传动路线相当但由于连杆较长因而二套连接机构的传动路线会长些,然而在机架的竖直高度被满足的情形下,机架的纬向尺寸却能相应缩短。
以前一种情况加以进一步说明,其中一个偏心件既与输入轴2L固定连接又与连杆32L的一端(外端)活动连接,连杆32L的另一端(内端)与固定在摆轴4L上的摆臂33L活动连接;另一个偏心件既与输入轴2R固定连接又与连杆32R的一端(外端)活动连接,连杆32R的另一端(内端)与固定在摆轴4R上的摆臂33R活动连接。
摆动机构包括呈经向、平行布置的摆轴4L、4R,间隔固定于摆轴4L上的多个外置摇杆41L、多个内置摇杆42L,以及间隔固定于摆轴4R上的多个外置摇杆41R、多个内置摇杆42R,两个摆轴等高。
详细地,摆轴4L固定有多个提臂连接座40L,外置摇杆41L、内置摇杆42L固定于各提臂连接座40L的端面,同样地,摆轴4R也固定有多个提臂连接座40R,外置摇杆41R、内置摇杆42R固定于各提臂连接座40R的端面。
两个输入轴、两个摆轴都与织机的经线方向一致;二个连杆与织机的纬线方向大体一致;图中还画出了三轴向坐标,其中,X轴平行于各底梁的延伸方向,Y轴平行于输入轴、摆轴的延伸方向并且垂直于X轴以及呈水平,Z轴是竖直的。
小齿轮11L与大齿轮21L的速比为4.2∶1,以及小齿轮11R与大齿轮21R的速比为4.2∶1,具体地讲,小齿轮11L、11R的齿数均为23个,大齿轮21L、21R的齿数均有97个。
提刀机构由短提刀机构和长提刀机构组成,其中,短提刀机构由一组较短的提刀52、分别铰接内置摇杆42L及内置摇杆42R和一组提刀52的多个内吊杆51组成,多个内吊杆51的规格相同;长提刀机构由一组较长的提刀52’、分别铰接外置摇杆41L及外置摇杆41R和一组提刀52’的多个外吊杆51’组成,多个外吊杆51’的规格相同。
二个电机内置编码器,二边的大、小齿轮采用合理速比以减速传动二边的输入轴,再由二边的连接机构各自带动摆动机构的相应一条摆轴的摆动,从而实现了两条摆轴的互为反向100%同步往复摆动,由于两条摆轴的反向同步性高,因而铰接于摆动机构下方的二套提刀机构的互为反向往复升降运动精度高,即一组提刀到达上止点的同时另一组提刀相应地位于下止点位置,最终形成为高清晰度的提花开口。
机架由呈纬向布置且相互平行的两块底梁(图1已标出前底梁1,图2已标出后底梁1’)和连接所述底梁的两块连接梁(未画出)组成;两个电机呈对称地固定在一块底梁上;两个输入轴由安装在两块底梁上的轴承支承,两个输入轴以摆动机构的两摆轴的轴线间隔中心呈等距离布置,两个输入轴等高。
本实施例中,图中示出了电机1L、电机1R分别固定在前底梁1的内壁上;电机1L的输出轴伸出前底梁1之外,而电机1R的输出轴也伸出前底梁1之外。
输入轴2L的两端均伸出前底梁1、后底梁1’之外,输入轴2R的两端也均伸出前底梁1、后底梁1’之外。
两个电机的规格相同,且均采用伺服电机;两个电机由电信号维持同步确保二个输入轴转速相等,两个电机自身的转动作为提花机的动力源。
作为一种优先的实施方式,连接机构3L由曲柄31L(已图示)、连杆32L和摆臂33L组成,同样地,连接机构3R则由曲柄31R(已图示)、连杆32R和摆臂33R组成,请参见图2,曲柄31L其轴孔310L套置并固定在输入轴2L上而其偏心轴头311L由安装在连杆32L外端的轴承支承,连杆32L的内端与摆轴4L上固定的摆臂33L铰接(参见图2)或者与摆轴4R上固定的摆臂33R相铰接,结合图6、8;曲柄31R其轴孔310R套置并固定在输入轴2R上而其偏心轴头311R由安装在连杆32R外端的轴承支承,连杆32R的内端与摆轴4R上固定的摆臂33R铰接(参见图2)或者与摆轴4L上固定的摆臂33L相铰接。
两个输入轴可通用互换,曲柄、连杆和摆臂分别可通用互换(包括尺寸、质量分别相同);两个曲柄的安装角度相差180°。
在本实施例中,由曲柄、连杆和摆臂组成的两套连接机构分别位于后底梁1’的外侧。
作为另一种实施方式,两套连接机构分别由一个偏心轮(未图示)、一个连杆和一个摆臂组成,偏心轮的内孔压装在输入轴上,偏心轮由安装在连杆其大端(外端)的轴承支承,连杆的小端(内端)与固定在摆轴上的摆臂铰接。两个输入轴可通用互换,偏心轮、连杆和摆臂分别可通用互换(包括尺寸、质量分别相同);两个偏心轮的安装角度相差180°。
由偏心轮、连杆和摆臂组成的两套连接机构分别位于后底梁1’的外侧。