具有夜航操作辅助功能的无人机
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及一种具有夜航操作辅助功能的无人机,特别涉及一种以控制舵控制飞航方向的具有夜航操作辅助功能的无人机。
背景技术
目前一般的无人机并不具有夜航操作辅助功能,因此当使用者在夜间环境或视线不佳的情况下进行遥控飞行时,容易因为无法清楚辨识无人机当前的飞行状况(例如无人机当前的滚转程度等),而无法准确的遥控无人机。此可能导致无人机处于不当的滚转角而影响其飞行,或是造成不必要的功率消耗。有鉴于此,为了在夜间环境或视线不佳的情况下能辅助使用者进行无人机的遥控,将需要一种具有夜航操作辅助功能的无人机。
发明内容
为了解决上述问题,本发明的一构想在于提供一种具有夜航操作辅助功能的无人机。
基于前述构想,本发明提供一种具有夜航操作辅助功能的无人机,包括:传感器,感测该无人机的滚转角;第一控制舵;第二控制舵;以及飞控系统,当该飞控系统处于夜航操作模式,且该无人机并未接收到远端控制装置所发出的遥控指令时,该飞控系统根据该滚转角控制该第一控制舵与该第二控制舵,以使该无人机的该滚转角维持在第一预设角度范围内;其中该传感器通讯连接该飞控系统;其中该飞控系统操控连接该第一控制舵与该第二控制舵。
在本发明的一较佳实施例中,该第一预设角度范围为-5度至+5度。
在本发明的一较佳实施例中,当该飞控系统处于该夜航操作模式,且该无人机接收到该远端控制装置所发出的该遥控指令时,该飞控系统根据该滚转角控制该第一控制舵与该第二控制舵,以使该无人机的该滚转角维持在第二预设角度范围内,借以避免该滚转角因为该遥控指令而超出该第二预设角度范围。
在本发明的一较佳实施例中,该第二预设角度范围为-20度至+20度。
在本发明的一较佳实施例中,当该无人机接收到该远端控制装置所发出的该遥控指令时,该飞控系统根据该滚转角控制该第一控制舵与该第二控制舵,以使该无人机的该滚转角维持在第二预设角度范围内,借以避免该滚转角因为该遥控指令而超出该第二预设角度范围。
在本发明的一较佳实施例中,该无人机进一步包括:第一舵面控制器,连接该第一控制舵;以及第二舵面控制器,连接该第二控制舵;其中该飞控系统操控连接该第一舵面控制器与该第二舵面控制器;其中该飞控系统通过该第一舵面控制器控制该第一控制舵;其中该飞控系统通过该第二舵面控制器控制该第二控制舵。
在本发明的一较佳实施例中,当该飞控系统处于该夜航操作模式时,该无人机以预定频率持续收到该远端控制装置发出的信号。
在本发明的一较佳实施例中,当该飞控系统处于该夜航操作模式,而该无人机在第一预设时间内未接收到该远端控制装置发出的信号时,该飞控系统控制该无人机以飞至预设归航点。
在本发明的一较佳实施例中,当该飞控系统处于该夜航操作模式,而该无人机在该第一预设时间内未接收到该远端控制装置发出的该信号而飞至该预设归航点,并在到达该预设归航点后在第二预设时间内未接收到该远端控制装置发出的指令时,该飞控系统使该无人机降落。
在本发明的一较佳实施例中,该传感器为姿态仪。
在本发明的一较佳实施例中,当该飞控系统处于该夜航操作模式,且该无人机接收到该远端控制装置所发出的该遥控指令时,该飞控系统不会将该无人机的该滚转角限制在第一预设角度范围内。
本发明前述各方面及其它方面依据下述的非限制性具体实施例详细说明以及参照附随的图式将更趋于明了。
附图说明
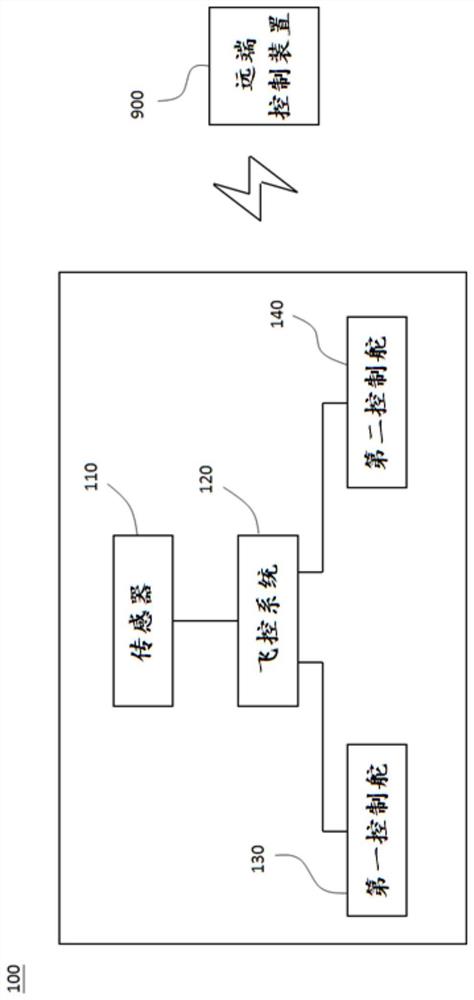
图1为本发明具有夜航操作辅助功能的无人机一具体实施例的系统架构图。
图2为本发明具有夜航操作辅助功能的无人机一具体实施例的示意图。
图3为本发明具有夜航操作辅助功能的无人机一具体实施例的飞行示意图。
附图标记说明:
100 无人机
110 传感器
120 飞控系统
130 第一控制舵
140 第二控制舵
200 无人机
210 传感器
220 飞控系统
230 第一控制舵
240 第二控制舵
250 第一舵面控制器
260 第二舵面控制器
300 无人机
320 飞控系统
330 第一控制舵
340 第二控制舵
390 滚转角
900 远端控制装置
具体实施方式
请参阅图1,其例示说明了根据本发明具有夜航操作辅助功能的无人机一具体实施例的系统架构图。如图1所示实施例,具有夜航操作辅助功能的无人机100包括传感器110、飞控系统120、第一控制舵130以及第二控制舵140。传感器110通讯连接飞控系统120,飞控系统120操控连接第一控制舵130与第二控制舵140。其中,传感器110可感测无人机100的滚转角。而当飞控系统120处于一夜航操作模式,且无人机100并未接收到一远端控制装置900(图未示)所发出的遥控指令时,飞控系统120可根据滚转角以控制第一控制舵130与第二控制舵140,借以使无人机100的滚转角维持在一第一预设角度范围内。在一具体实施例中,传感器110为一姿态仪。
在一具体实施例中,借由将无人机100的滚转角维持在第一预设角度范围内,可使无人机100维持在较低的功率消耗下飞行,进而达到省油或省电的效果。在一具体实施例中,第一预设角度范围为-5度至+5度。然应了解,第一预设角度范围并非仅可设定为-5度至+5度,而是可视需求设定为其它范围。在一具体实施例中,第一预设角度范围可在无人机100飞行前进行设定。在另一具体实施例中,第一预设角度范围可在无人机100的飞行过程中再行调整。在又一具体实施例中,第一预设角度范围为固定范围,而无法由使用者另行设定。
在一具体实施例中,当飞控系统120处于夜航操作模式,且无人机100接收到远端控制装置900所发出的遥控指令时,飞控系统120不会将无人机100的该滚转角限制在一第一预设角度范围内。如此,即可确保使用者在夜航操作模式下仍可顺利操控无人机100。在一具体实施例中,远端控制装置900以无线通讯的方式对无人机100发出遥控指令。
在一具体实施例中,当飞控系统120处于夜航操作模式,且无人机100接收到远端控制装置900所发出的遥控指令时,飞控系统120根据滚转角控制第一控制舵130与第二控制舵140,以使无人机100的滚转角维持在一第二预设角度范围内,借以避免滚转角因为远端控制装置900所发出的遥控指令而超出第二预设角度范围。在一具体实施例中,借由将无人机100的滚转角维持在第二预设角度范围内,可避免无人机100因其滚转角超出滚转角阈值而导致翻覆。在一具体实施例中,第一预设角度范围与第二预设角度范围皆不超出滚转角阈值,例如当滚转角阈值分别为-20度与+20度时,则第一预设角度范围与第二预设角度范围仅可在-20度与+20度内进行设定。在一具体实施例中,第一预设角度范围小于第二预设角度范围。
在一具体实施例中,第二预设角度范围为-20度至+20度。然应了解,第二预设角度范围并非仅可设定为-20度至+20度,而是可视需求设定为其它范围。在一具体实施例中,第二预设角度范围可在无人机100飞行前进行设定(例如可视当前的风速以决定是否需缩小或扩大第二预设角度范围),但其范围无法设定为超出无人机100的滚转角阈值。在另一具体实施例中,第二预设角度范围可在无人机100的飞行过程中再行调整(例如可视当前的风速以决定是否需缩小或扩大第二预设角度范围),但其范围无法设定为超出无人机100的滚转角阈值。在又一具体实施例中,第二预设角度范围为固定范围,而无法由使用者另行设定,如此即可避免不熟悉无人机100的使用者因错误的设定,而使第二预设角度范围超出无人机100的滚转角阈值。
在一具体实施例中,当无人机100接收到远端控制装置900所发出的遥控指令时,即便无人机100并非处于夜航操作模式,飞控系统120仍根据滚转角控制第一控制舵130与第二控制舵140,以使无人机100的滚转角维持在一第二预设角度范围内,借以避免滚转角因为远端控制装置900所发出的遥控指令而超出第二预设角度范围。
在一具体实施例中,当飞控系统120处于夜航操作模式时,无人机100以一预定频率持续收到远端控制装置900发出的信号。如此,无人机100即可借此确认是否已飞离远端控制装置900的可操控范围。在一具体实施例中,当飞控系统120处于夜航操作模式,而无人机100在一第一预设时间内未接收到远端控制装置900发出的信号时,飞控系统120即控制无人机100以飞至一预设归航点。在一具体实施例中,当飞控系统120处于夜航操作模式,而无人机100在第一预设时间内未接收到远端控制装置900发出的信号而飞至预设归航点,并在到达预设归航点后在一第二预设时间内未接收到远端控制装置900发出的指令时,飞控系统120即控制无人机100以使无人机100降落。
在一具体实施例中,飞控系统120包括一或多个处理器,飞控系统120通过该一或多个处理器以硬件与软件协同运作的方式实施对第一控制舵130以及第二控制舵140的控制。在一具体实施例中,飞控系统120并通过该一或多个处理器,以硬件与软件协同运作的方式控制无人机100进行飞行(例如控制无人机100以飞至一预设归航点)。
请参阅图2,其例示说明了根据本发明具有夜航操作辅助功能的无人机一具体实施例的示意图。如图2所示实施例,具有夜航操作辅助功能的无人机200包括传感器210、飞控系统220、第一控制舵230、第二控制舵240、第一舵面控制器250以及第二舵面控制器260。传感器210通讯连接飞控系统220,飞控系统220操控连接第一舵面控制器250与第二舵面控制器260。第一舵面控制器250连接第一控制舵230,借此可视为飞控系统220通过第一舵面控制器250以操控连接第一控制舵230,并进而可通过第一舵面控制器250控制第一控制舵230。第二舵面控制器260连接第二控制舵240,借此可视为飞控系统220通过第二舵面控制器260以操控连接第二控制舵240,并进而可通过第二舵面控制器260控制第二控制舵240。
请参阅图3,其例示说明了根据本发明具有夜航操作辅助功能的无人机一具体实施例的飞行示意图。如图3所示实施例,具有夜航操作辅助功能的无人机300其飞控系统320根据无人机300的滚转角390控制第一控制舵330与第二控制舵340,以在不同情况下(请参见上述内容)使无人机300的滚转角390维持在一第一预设角度范围内或第二预设角度范围内。
至此,本发明的具有夜航操作辅助功能的无人机已经由上述说明及图式加以说明。然应了解,本发明的各个具体实施例仅是作为说明之用,在不脱离本发明权利要求书与精神下可进行各种改变,且均应包括在本发明的权利要求所保护的范围中。因此,本说明书所描述的各具体实施例并非用以限制本发明,本发明的真实范围与精神公开在以下权利要求书中。
- 具有夜航操作辅助功能的无人机
- 一种便于安装的无人机夜航灯