一种工业机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及自动化机械领域,尤其是涉及到一种工业机器人。
背景技术
随着科技的发展,机器人的技术探究日益成熟,机器人的功能日益强大,满足各种复杂的应用需求,随着机器人功能的多样性发展,机器人的内部构造日益复杂,发热部件越来越多,使得机器人内部的环境温度居高不下,在高温的环境中,加上电子元件本身工作时发热,存在将焊锡融化使其脱焊的现象。
发明内容
针对现有技术的不足,本发明是通过如下的技术方案来实现:一种工业机器人,其结构包括活动头、机体、机械臂、散热座、脚轮,所述活动头与机体机械连接,所述机体底部设有脚轮,所述机械臂与机体相连接,所述散热座位于机体底部,所述散热座与脚轮相连接;
所述散热座由一号腔、过渡管、散热球、输出口构成,所述一号腔中央设有散热球,所述散热球与过渡管相连接,所述过渡管与输出口相通。
作为本发明的进一步优化,所述散热球由进口、散热机构、实心壁层、出口构成,所述进口与散热机构相通,所述散热机构安装在实心壁层所围成的腔体内,所述出口贯穿实心壁层。
作为本发明的进一步优化,所述散热机构由连接杆、中心轴盘、挡层、固定板、一号腔、二号腔、引导块、双向引导块构成,所述连接杆与中心轴盘机械焊接,所述中心轴盘位于一号腔中央,所述一号腔设于二号腔内,所述连接杆与固定板、引导块、双向引导块相连接,所述固定板、引导块、双向引导块设于连接杆远离中心轴盘的一端上,所述挡层与固定板固定连接,所述固定板位于进口处,所述挡层位于固定板的外侧上,所述挡层与进口之间存在一定的间隙,使得从进口进入的空气可以沿着挡层的弧度从挡层与引导块之间的间距进入到一号腔内。
作为本发明的进一步优化,所述固定板与双向引导块处于同一竖直线上,并且两者之间通过中心轴盘相连接,所述固定板位于双向引导块上方。
作为本发明的进一步优化,所述引导块设有两个并且成对称结构设于固定板与双向引导块所在的连接杆两侧,所述引导块为单向引导结构。
作为本发明的进一步优化,所述引导块靠近固定板的一侧呈一定的弧度向内弯曲,使得热气的进入更为顺畅,远离固定板的一侧向外弧形扩张,使得热气的输出更为顺畅。
作为本发明的进一步优化,所述固定板、引导块、双向引导块之间均设有空隙,便于空气的流通。
作为本发明的进一步优化,所述引导块靠近双向引导块的一侧与双向引导块之间的开口与输出口相通,所述引导块远离双向引导块的一侧与双向引导块之间的开口与进口相通。
本发明一种工业机器人,当机器人工作时内部的元件工作产生的热量会经过进口进入到引导块远离双向引导块的一侧与双向引导块之间的开口,由于挡层向外拱起,使得热气会沿着挡层的弧形往两边运动,并且挡层的阻挡使得热气从两边流动的速度提升,热气进入到一号腔内,并从引导块靠近双向引导块的一侧与双向引导块之间的开口输出到二号腔内,从而进入到过渡管内,并经过过渡管输送到输出口排出到设备外。
与现有技术相比,本发明具有以下优点:
本发明通过将挡层设立为向外拱起的弧形结构,并且从中间往两边厚度依次变薄,元件工作产生的热量进入进口后骤然被挡层阻挡,从而迅速沿着挡层的弧度从挡层与引导块之间的间距进入到一号腔内,实现热量的迅速排送;
本发明利用引导块靠近双向引导块的一侧与双向引导块之间的开口具有一定弧形引导,使得进入到一号腔内的热量会沿着该弧形引导向外,从而实现热量从输出口的排出,达到将机器人工作时电子元件产生的热量向外排出,有效降低其作业时的自身温度,从而防止温度持续升高造成焊锡融化,防止脱焊。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
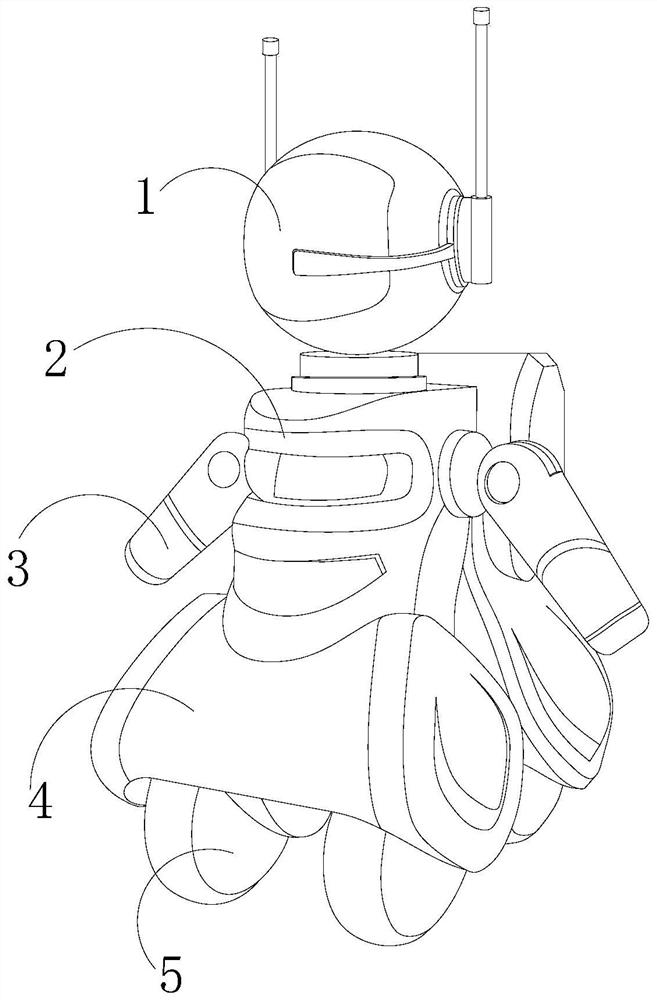
图1为本发明一种工业机器人的结构示意图。
图2为本发明一种工业机器人的散热座结构图。
图3为图2的侧视图。
图4为本发明一种工业机器人的散热球结构图。
图5为本发明一种工业机器人的散热机构结构图。
图中:活动头-1、机体-2、机械臂-3、散热座-4、脚轮-5、一号腔-a、过渡管-b、散热球-c、输出口-d、进口-c1、散热机构-c2、实心壁层-c3、出口-c4、连接杆-c21、中心轴盘-c22、挡层-c23、固定板-c24、一号腔-c25、二号腔-c26、引导块-c27、双向引导块-c28。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式以及附图说明,进一步阐述本发明的优选实施方案。
实施例1
请参阅图1-图5,本发明提供一种工业机器人,其结构包括活动头1、机体2、机械臂3、散热座4、脚轮5,所述活动头1与机体2机械连接,所述机体2底部设有脚轮5,所述机械臂3与机体2相连接,所述散热座4位于机体2底部,所述散热座4与脚轮5相连接;
所述散热座4由一号腔a、过渡管b、散热球c、输出口d构成,所述一号腔a中央设有散热球c,所述散热球c与过渡管b相连接,所述过渡管b与输出口d相通。
所述散热球c由进口c1、散热机构c2、实心壁层c3、出口c4构成,所述进口c1与散热机构c2相通,所述散热机构c2安装在实心壁层c3所围成的腔体内,所述出口c4贯穿实心壁层c3。
所述散热机构c2由连接杆c21、中心轴盘c22、挡层c23、固定板c24、一号腔c25、二号腔c26、引导块c27、双向引导块c28构成,所述连接杆c21与中心轴盘c22机械焊接,所述中心轴盘c22位于一号腔c25中央,所述一号腔c25设于二号腔c26内,所述连接杆c21与固定板c24、引导块c27、双向引导块c28相连接,所述固定板c24、引导块c27、双向引导块c28设于连接杆c21远离中心轴盘c22的一端上,所述挡层c23与固定板c24固定连接,所述固定板c24位于进口c1处,所述挡层c23位于固定板c24的外侧上,所述挡层c23与进口c1之间存在一定的间隙,使得从进口c1进入的空气可以沿着挡层c23的弧度从挡层c23与引导块c27之间的间距进入到一号腔c25内。
所述固定板c24与双向引导块c28处于同一竖直线上,并且两者之间通过中心轴盘c22相连接,所述固定板c24位于双向引导块c28上方。
所述引导块c27设有两个并且成对称结构设于固定板c24与双向引导块c28所在的连接杆c21两侧,所述引导块c27为单向引导结构。
所述引导块c27靠近固定板c24的一侧呈一定的弧度向内弯曲,使得热气的进入更为顺畅,远离固定板c24的一侧向外弧形扩张,使得热气的输出更为顺畅。
所述固定板c24、引导块c27、双向引导块c28之间均设有空隙,便于空气的流通。
所述引导块c27靠近双向引导块c28的一侧与双向引导块c28之间的开口与输出口d相通,所述引导块c27远离双向引导块c28的一侧与双向引导块c28之间的开口与进口c1相通。
当机器人工作时内部的元件工作产生的热量会经过进口c1进入到引导块c27远离双向引导块c28的一侧与双向引导块c28之间的开口,由于挡层c23向外拱起,使得热气会沿着挡层c23的弧形往两边运动,并且挡层c23的阻挡使得热气从两边流动的速度提升,热气进入到一号腔c25内,并从引导块c27靠近双向引导块c28的一侧与双向引导块c28之间的开口输出到二号腔c26内,从而进入到过渡管b内,并经过过渡管b输送到输出口d排出到设备外。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神或基本特征的前提下,不仅能够以其他的具体形式实现本发明,还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围,因此本发明要求保护范围由所附的权利要求书及其等同物界定,而不是上述说明限定。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 工业机器人、用于该工业机器人的组件系统以及用于组装该工业机器人的方法
- 一种工业机器人以及工业机器人关节