基于红外遥感的电力线路智能监测装置
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及线路监测设备技术领域,具体为基于红外遥感的电力线路智能监测装置。
背景技术
电力是进行现代化建设所必不可少的的基础原动力,电力的传输一般都是由高压线路进行传输,高压线路分布广,架空线路长,同时暴露在室外,受环境与自然变化的影响,高压线在电力的运输中难免会发生故障,从而影响电力的正常传输,为及时发现电力在运输中可能出现的状况,人们需要对高压线路进行监测,以便于及时发现问题并排除故障。
现有用于电力线路监测的智能设备,也即电路检修过程中我们所常见到的线路监测机器人,这种设备类似一个车体,车体的上方安装有用于驱动整个装置在线路上行走的滚轮,车体上还安装有用于监控线路的红外探头,人们在地面上即可控制该设备在线路上行走,并通过红外探头实时监测线路上的情况,由于线路上每隔一段距离都会安装有一个间隔棒,当该线路监测机器人通过间隔棒时,滚轮压在间隔棒上时,容易造成线路监测设备的大幅摇晃,降低了现有电力线路监测设备的实用性。
有鉴于此,本发明提供了一种基于红外遥感的电力线路智能监测装置,以解决上述现有技术中存在的技术问题。
发明内容
本发明提供了基于红外遥感的电力线路智能监测装置,具备避免电力线路监测设备经过间隔棒时造成大幅度摇晃的有益效果,解决了现有技术中,由于线路上每隔一段距离都会安装有一个间隔棒,当该线路监测机器人通过间隔棒时,滚轮压在间隔棒上时,容易造成线路监测设备的摇晃,降低了现有电力线路监测设备实用性的问题。
本发明提供如下技术方案,基于红外遥感的电力线路智能监测装置,包括电力线路智能监测装置本体,以及安装在电力线路智能监测装置本体上的红外摄像头,所述电力线路智能监测装置本体上可转动的安装有第一驱动轴、第二驱动轴、第三驱动轴和第四驱动轴;所述第一驱动轴的一端固定安装有第一皮带轮,所述第一驱动轴的另一端固定安装有同时与第一驱动轴垂直的四个第一支撑件,四个第一支撑件呈十字分布在所述第一驱动轴的外表;所述第二驱动轴的一端固定安装有第二皮带轮,所述第二驱动轴的另一端固定安装有同时与第二驱动轴垂直的四个第二支撑件,四个第二支撑件呈十字分布在所述第二驱动轴的外表面;所述第三驱动轴的一端固定安装有第三皮带轮,所述第三驱动轴的另一端固定安装有同时与第三驱动轴垂直的四个第三支撑件,四个第三支撑件呈十字分布在所述第三驱动轴的外表面;所述第四驱动轴的一端固定安装有第四皮带轮,所述第四驱动轴的另一端固定安装有同时与第四驱动轴垂直的四个第四支撑件,四个第四支撑件呈十字分布在所述第四驱动轴的外表面;其中,所述第一支撑件与所述第三支撑件呈水平和垂直设置,所述第二支撑件与所述第四支撑件呈倾斜设置,所述第一皮带轮、第二皮带轮、第三皮带轮和第四皮带轮依此通过传动皮带传动连接。
优选的,所述电力线路智能监测装置本体上固定安装有安装板,所述安装板上固定安装有第一纵杆和第二纵杆,所述第一纵杆上固定安装有第一驱动管,所述第二纵杆上固定安装有第二驱动管,所述第一驱动管与所述第二驱动管在同一直线上;其中,所述第一驱动管上可转动的安装所述第一驱动轴和第二驱动轴,所述第二驱动管上可转动的安装所述第三驱动轴和第四驱动轴。
优选的,所述第二支撑件、第三支撑件和第四支撑件的形状大小及其内部构造均与所述第一支撑件相同;其中,所述第一支撑件包括固定套筒,所述固定套筒的一端与所述第一驱动轴相固定,所述固定套筒的内部可伸缩的套设有伸缩套筒,所述伸缩套筒位于所述固定套筒内的一端通过第二弹簧与所述固定套筒的内壁相连接。
优选的,所述伸缩套筒位于所述固定套筒外部的一端固定连接有卡线块,所述卡线块的内部开设有锥形的卡线槽,用于卡设线路。
优选的,所述卡线块的内部开设有连通槽,所述连通槽的一端与所述卡线槽连通,其另一端与所述伸缩套筒的内腔相连通,伸缩套筒内可伸缩的套设有调节杆,所述调节杆的一端贯穿连通槽并延伸至所述卡线槽内,所述调节杆的另一端固定安装有滑动块,用于在所述伸缩套筒内滑动,所述滑动块的底部通过第一弹簧与所述伸缩套筒的内腔相连接;其中,所述伸缩套筒内还开设有调节滑槽,所述调节滑槽的内部可滑动的安装有调节块,所述调节块上开设有与所述调节杆的杆斜面相接触的块斜面,所述调节块上还固定安装有卡接块,所述卡接块的一端贯穿所述伸缩套筒的侧壁,用于与所述固定套筒的内壁形成抵触,所述调节块通过弹性橡胶圈与所述调节槽的内壁形成抵触,所述弹性橡胶圈用于对所述调节块提供弹力,并驱动所述调节块靠近所述调节杆运动。
优选的,所述卡接块上固定安装有第二齿牙,所述固定套筒内固定安装有第一齿牙,所述第一齿牙用于与所述第二齿牙啮合,从而增大所述卡接块与所述固定套筒直接的摩擦力。
优选的,所述第一驱动管上固定安装有驱动电机,所述驱动电机的输出轴上固定连接有蜗杆;所述第一驱动轴上固定安装有涡轮,所述蜗杆与所述涡轮相啮合。
由上可知,相比现有技术,本发明具备以下有益效果:
1、该基于红外遥感的电力线路智能监测装置,能够保证线路监测装置在运动时的稳定性,减小线路监测装置在途径间隔棒时的晃动概率。
2、该基于红外遥感的电力线路智能监测装置,具体参考图加以说明,以该装置在高压线上静止时第一支撑件c与第三支撑件j与高压线形成支撑为例,当该装置向右运动时,此时第一驱动轴、第二驱动轴、第三驱动轴和第四驱动轴在传动皮带的转动下同时顺时针转动,随着运动的进行,转动角度为45°时,此时第二支撑件g与第四支撑件o会与高压线路形成支撑,随着运动的继续进行,则后续每转动45°与高压线形成支撑的分别是第一支撑件d与第三支撑件k,第二支撑件h与第四支撑件p,第一支撑件a与第三支撑件m,第二支撑件e与第四支撑件q,第一支撑件b与第三支撑件i,第二支撑件f与第四支撑件n,最后是第一支撑件c与第三支撑件j,以此循环,由于上述各个支撑件之间都存在间隔,因此高压线上的间隔棒会大概率的存在于两支撑件之间,从而避免传统的监测设备在途径间隔棒必然碾压到间隔棒而产生晃动的问题。
3、该红外遥感的电力线路智能监测装置正常运动时,卡线槽会在高压线上,此时高压线会对调节杆形成抵触,并促使其向下运动压缩第一弹簧,此时调节杆的杆斜面会对调节块施压,调节块远离调节杆运动并促使卡接块与固定套筒的内壁形成接触,从而避免伸缩套筒向固定套筒内缩进,避免红外遥感的电力线路智能监测装置在正常运动时,由于避免伸缩套筒向固定套筒内缩进而产生起伏晃动。
4、该红外遥感的电力线路智能监测装置上的第一支撑件、第二支撑件、第三支撑件或第四支撑件恰好碾压到间隔棒上时,由于间隔棒大于高压线的直径,此时间隔棒位于卡线槽内时并不能触碰到调节杆,调节杆不受力时会在第一弹簧的作用下向上运动,且此时由于不受调节杆的限制作用,调节块亦会在弹性橡胶圈的支撑作用下向调节杆方向运动,从而使得卡接块脱离与固定套筒的接触,此时伸缩套筒能够向固定套筒内缩进,用于缓冲间隔棒对线路监测装置造成的起伏晃动。
附图说明
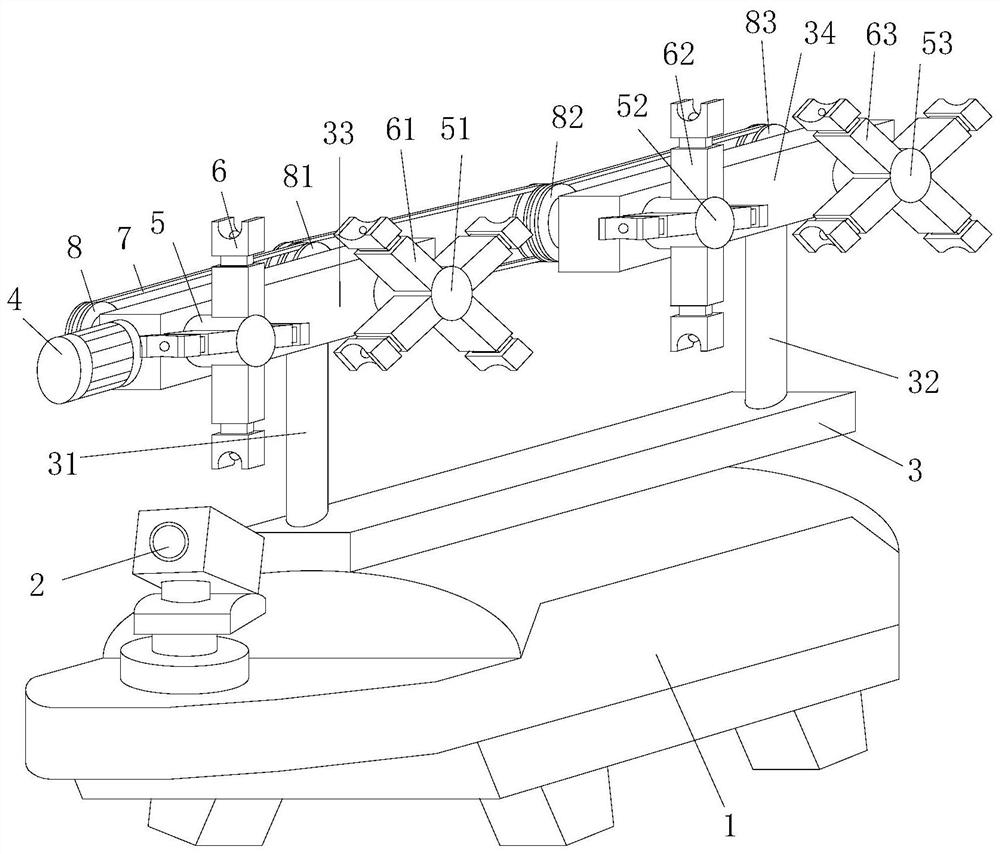
图1为本发明的结构示意图。
图2为本发明的扇叶固定座和连接座的剖视图。
图3为本发明的防护罩剖视图。
图4为本发明的扇叶固定座俯剖视图。
图5为本发明的连接座主视图。
图中:1、电力线路智能监测装置本体,2、红外摄像头,3、安装板,31、第一纵杆,32、第二纵杆,33、第一驱动管,34、第二驱动管,4、驱动电机,41、蜗杆,42、涡轮,5、第一驱动轴,51、第二驱动轴,52、第三驱动轴,53、第四驱动轴,6、第一支撑件,61、第二支撑件,62、第三支撑件,63、第四支撑件,600、固定套筒,601、第一齿牙,610、伸缩套筒,611、调节滑槽,620、卡线块,621、卡线槽,622、连通槽,630、调节杆,631、杆斜面,640、滑动块,650、调节块,651、块斜面,660、卡接块,661、第二齿牙,670、第一弹簧,680、第二弹簧,690、弹性橡胶圈,7、传动皮带,8、第一皮带轮,81、第二皮带轮,82、第三皮带轮,83、第四皮带轮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
请参阅图1-5,本实施例公开了一种基于红外遥感的电力线路智能监测装置,包括电力线路智能监测装置本体1,以及安装在电力线路智能监测装置本体1上的红外摄像头2,电力线路智能监测装置本体1上可转动的安装有第一驱动轴5、第二驱动轴51、第三驱动轴52和第四驱动轴53;第一驱动轴5的一端固定安装有第一皮带轮8,第一驱动轴5的另一端固定安装有同时与第一驱动轴5垂直的四个第一支撑件6,四个第一支撑件6呈十字分布在第一驱动轴5的外表;第二驱动轴51的一端固定安装有第二皮带轮81,第二驱动轴51的另一端固定安装有同时与第二驱动轴51垂直的四个第二支撑件61,四个第二支撑件61呈十字分布在第二驱动轴51的外表面;第三驱动轴52的一端固定安装有第三皮带轮82,第三驱动轴52的另一端固定安装有同时与第三驱动轴52垂直的四个第三支撑件62,四个第三支撑件62呈十字分布在第三驱动轴52的外表面;第四驱动轴53的一端固定安装有第四皮带轮83,第四驱动轴53的另一端固定安装有同时与第四驱动轴53垂直的四个第四支撑件63,四个第四支撑件63呈十字分布在第四驱动轴53的外表面;其中,第一支撑件6与第三支撑件62呈水平和垂直设置,第二支撑件61与第四支撑件63呈倾斜设置,第一皮带轮8、第二皮带轮81、第三皮带轮82和第四皮带轮83依此通过传动皮带7传动连接。
由于传统滚轮在高压线上滚动时,滚轮与高压线的接触是连需不间断的,因此滚轮是必然会触碰到高压线的间隔棒的,当滚轮在一根高压线上平稳的滚动时,可看作为滚轮的轮轴每转动一个角度,也即监测设备每运行一小段距离,每个滚轮上都有一个接触的点与高压线形成支撑,为解决这一问题,本方案将传统的滚轮改成杆状的结构,也即我们只需要保证监测装置没运动一小段距离都有两个杆与高压线形成接触即可。
本实施例中,第二支撑件61与第四支撑件63的倾斜角度相同,且倾斜角度为45°,使用时,将该基于红外遥感的电力线路智能监测装置悬挂在高压线上,使得第一支撑件6和第二支撑件61中的一个,以及第三支撑件62和第四支撑件63中的一个与高压线路接触,具体参考图5加以说明,以该装置在高压线上静止时第一支撑件6c与第三支撑件62j与高压线形成支撑为例,当该装置向右运动时,此时第一驱动轴5、第二驱动轴51、第三驱动轴52和第四驱动轴53在传动皮带7的转动下同时顺时针转动,随着运动的进行,转动角度为45°时,此时第二支撑件61g与第四支撑件63O会与高压线路形成支撑,随着运动的继续进行,则后续每转动45°与高压线形成支撑的分别是第一支撑件6d与第三支撑件62k第二支撑件61h与第四支撑件63p,第一支撑件6a与第三支撑件62m第二支撑件61e与第四支撑件63q,第一支撑件6b与第三支撑件62i第二支撑件61f与第四支撑件63n,最后是第一支撑件6c与第三支撑件62j,以此循环,由于上述各个支撑件之间都存在间隔,因此高压线上的间隔棒会大概率的存在于两支撑件之间,从而避免传统的监测设备在途径间隔棒必然碾压到间隔棒而产生晃动的问题。
电力线路智能监测装置本体1上固定安装有安装板3,安装板3上固定安装有第一纵杆31和第二纵杆32,第一纵杆31上固定安装有第一驱动管33,第二纵杆32上固定安装有第二驱动管34,第一驱动管33与第二驱动管34在同一直线上;其中,第一驱动管33上可转动的安装第一驱动轴5和第二驱动轴51,第二驱动管34上可转动的安装第三驱动轴52和第四驱动轴53。
第二支撑件61、第三支撑件62和第四支撑件63的形状大小及其内部构造均与第一支撑件6相同;其中,第一支撑件6包括固定套筒600,固定套筒600的一端与第一驱动轴5相固定,固定套筒600的内部可伸缩的套设有伸缩套筒610,伸缩套筒610位于固定套筒600内的一端通过第二弹簧680与固定套筒600的内壁相连接,伸缩套筒610位于固定套筒600外部的一端固定连接有卡线块620,卡线块620的内部开设有锥形的卡线槽621,用于卡设线路。
相应的,第二支撑件61中的固定套筒600与第二驱动轴51固定,第三支撑件62中的固定套筒600与第三驱动轴52固定,第四支撑件63中的固定套筒600与第四驱动轴53固定,当第一支撑件6与高压线形成抵触时,则第一支撑件6上的卡线槽621卡设在高压线上,第二支撑件61、第三支撑件62以及第四支撑件63与高压线接触时的卡接方式与第一支撑件6相同,不赘述。
当卡线槽621恰好卡在间隔棒上时,此时该卡线块620受间隔棒的作用力较其他的卡线块620会更大,从而促使伸缩套筒610向固定套筒600内缩进,并压缩第二弹簧680,以此来缓冲间隔棒对线路监测装置造成的起伏晃动。
卡线块620的内部开设有连通槽622,连通槽622的一端与卡线槽621连通,其另一端与伸缩套筒610的内腔相连通,伸缩套筒610内可伸缩的套设有调节杆630,调节杆630的一端贯穿连通槽622并延伸至卡线槽621内,调节杆630的另一端固定安装有滑动块640,用于在伸缩套筒610内滑动,滑动块640的底部通过第一弹簧670与伸缩套筒610的内腔相连接;其中,伸缩套筒610内还开设有调节滑槽611,调节滑槽611的内部可滑动的安装有调节块650,调节块650上开设有与调节杆630的杆斜面631相接触的块斜面651,调节块650上还固定安装有卡接块660,卡接块660的一端贯穿伸缩套筒610的侧壁,用于与固定套筒600的内壁形成抵触,调节块650通过弹性橡胶圈690与调节槽的内壁形成抵触,弹性橡胶圈690用于对调节块650提供弹力,并驱动调节块650靠近调节杆630运动。
需具体说明的是,该红外遥感的电力线路智能监测装置正常运动时,卡线槽621会在高压线上,此时高压线会对调节杆630形成抵触,并促使其向下运动压缩第一弹簧670,此时调节杆630的杆斜面631会对调节块650施压,调节块650远离调节杆630运动并促使卡接块660与固定套筒600的内壁形成接触,从而避免伸缩套筒610向固定套筒600内缩进,避免红外遥感的电力线路智能监测装置在正常运动时,由于避免伸缩套筒610向固定套筒600内缩进而产生起伏晃动。
还需要说明的是,该红外遥感的电力线路智能监测装置上的第一支撑件6、第二支撑件61、第三支撑件62或第四支撑件63恰好碾压到间隔棒上时,由于间隔棒大于高压线的直径,此时间隔棒位于卡线槽621内时并不能触碰到调节杆630,调节杆630不受力时会在第一弹簧670的作用下向上运动,且此时由于不受调节杆630的限制作用,调节块650亦会在弹性橡胶圈690的支撑作用下向调节杆630方向运动,从而使得卡接块660脱离与固定套筒600的接触,此时伸缩套筒610能够向固定套筒600内缩进,用于缓冲间隔棒对线路监测装置造成的起伏晃动。
卡接块660上固定安装有第二齿牙661,固定套筒600内固定安装有第一齿牙601,第一齿牙601用于与第二齿牙661啮合,从而增大卡接块660与固定套筒600直接的摩擦力。
第一驱动管33上固定安装有驱动电机4,驱动电机4的输出轴上固定连接有蜗杆41;第一驱动轴5上固定安装有涡轮42,蜗杆41与涡轮42相啮合。
本实施例通过驱动电机4来驱动第一驱动轴5的转动,进而驱动第三驱动轴52、第二驱动轴51以及第四驱动轴53的转动。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 基于红外遥感的电力线路智能监测装置
- 基于云平台的遥感智能监测应用的构建运行方法和装置