智能热压胶合机的新型胶合装置
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉防盗门生产设备领域,具体涉及智能热压胶合机的新型胶合装置。
背景技术
热压胶合机是一种可对复合面料、防盗门板实施热压,使复合面料或防盗门快速实现胶合的专用设备,传统的热压胶合机主要由机体、架设于机体上并呈层叠设置的若干块压合板及驱动压合板压紧或分离的驱动机构,各压合板之间具有压合空间,机体上设有可对压合板内部添加热能的热能发生器;在使用过程中,需要将待胶合的物体放置于压合空间内,然后通过驱动机构驱动压合板,使物体得到热胶合。然而,目前对于待胶合物体的放置及由机体上的输出分别通过人工进行,不仅操作过程较为繁琐,需要耗费较多的人力,而且存在较大的安全隐患,同时也延长了加工时间,胶合效率较低,为此本申请人提出了一种提高胶合效率、节省人工成本、消除安全隐患的全自动热压胶合设备,包括有胶合装置,胶合装置包括有机体、架设于机体上并
呈成叠设置的若干块压合板及驱动压合板压紧或分离的驱动机构,各压合板之间具有压合空间,机体上设有可对压合板内部添加热能的热能发生器,其特征在于:所述机体的两侧分别对称的设有待胶合物体输入装置及完成胶合物体输出装置,所述的待胶合物体输入装置
包括有机架、架设于机架上的输送平台、架设于输送平台上并可沿输送平台往复移动的送料机构及设于机架上并可对输送平台实施升降的升降机构a;所述的完成胶合物体输出装置包括有机架体、架设于机架体上的输出平台、架设于输出平台上并可沿输出平台往复移动的出料机构及设于机架体上并可对输出平台实施升降的升降机构b,通过在机体的两侧分别设置可自动将待胶合的物体输送至机体上压合空间内的待胶合物体输入装置及将经过胶合的物体输出的完成胶合物体输出装置,使对待胶合物体的输送及移出可通过全自动的机械实施操作,无需人工手动操作,不仅提高了胶合效率,而且降低了由于人工操作而产生的生产成本及消除了人工操作时存在的安全隐患,待胶合物体输入装置中输送平台的设置是为了对待胶合的物体实施输送,升降机构a的设置是由于压合板具有若干块,因此压合空间也就具有若干个,升降机构a可通过升降促使处于输送平台上的待胶合物体可对某个压合空间实施选择,然后通过送料机构将输送平台上的待胶合物体输送至压合空间内实施胶合;完成胶合物体输出装置中的升降机构b的设置是为了将输出平台升降至完成胶合的压合空间处,对该完成胶合的物体实施衔接,使完成胶合的物体可由输出平台自动输出;
目前的胶合装置是采用液压方式驱动压合板升降并通过升降机(升降机构)进行升降,不仅结构复杂,且由于采用液压驱动的方式进行驱动,液压驱动的方式使得压合板升降的精度不高、响应速度慢、控制起来较为繁琐,且液压驱动一般都包括油缸及液压缸,不仅体积大、占用面积较大且重量较重,不利于减轻胶合装置的总体重量。
发明内容
本发明所要解决的技术问题在于针对上述现有技术的不足,
提供智能热压胶合机的新型胶合装置。
为实现上述目的,本发明提供了如下技术方案:智能热压胶合机的新型胶合装置,包括机体,架设于机体上并呈成叠设置的若干块压合板及驱动压合板压紧或分离的驱动机构,各压合板之间均具有压合空间,机体上设有可对压合板内部添加热能的热能发生器,其特征在于:各压合板之间的压合空间四周设置有与待胶合防盗门厚度一致的垫块,所述驱动机构包括设于机体上部的驱动电机,设置于机体中并位于最下方压合板下部可沿机体纵向升降的胶合底座及设置于驱动电机与胶合底座之间可促使胶合底座沿机体纵向升降的传动结构,胶合底座与机体之间设有第一导向组件,压合板与机体之间设有第二导向组件,压合板成叠设置于胶合底座之上通过胶合底座的上升从而联动压合板上升,热能发生器可直接采用现有技术中的水箱及与水箱连通的水管,在此不做赘述。
采用上述技术方案,传统或现有的热压胶合机均是通过采用液压机构作为驱动源配合升降机实现压合板的升降,这种方式精度差、实时响应速度慢且重量较重,不利于胶合机在装配完成后的运输,本发明采用电机作为驱动源通过传动结构驱动胶合底座升降,胶合底座设置在最下面一块压合板下方,当胶合底座在传动结构的作用下沿第一导向组件上升时联动压合板沿第二导向组件同步上升,当驱动电机反转时传动结构使胶合底座沿第一导向组件下降,压合板沿第二导向组件同步下降,采用驱动电机的方式,精度更高,且电机可以选用伺服电机进一步提升控制精度,本发明的工作原理为通过驱动电机驱动及传动结构控制胶合底座上升,胶合底座上升时向上推挤压合板,使压合板沿第二导向结构同步上升,而当胶合底座下降时,压合板在自身重力下沿第二导向结构同步下降,由于各压合板之间的压合空间的四周安装有垫块,因此不会使得相邻压合板在下降或上升时使处于压合空间中的待胶合防盗门被过度挤压。
上述的智能热压胶合机的新型胶合装置可进一步设置为:机体周向在与外部输入装置高度适配位置设有在压合板上升或下降过程中对压合空间进行选择的定位结构。
采用上述技术方案,在机体周向设置当压合板上升或下降的过程中对压合空间进行选择的定位结构,不仅相应速度快,且定位快速。
上述的智能热压胶合机的新型胶合装置可进一步设置为:所述定位结构为设置于机体周向的至少四个定位气缸,定位气缸的活塞杆朝向压合空间设置。
采用上述技术方案,当上一压合空间中送入待胶合防盗门后,压合底座促使所有压合板上升,下一压合空间对准外部的待胶合防盗门输入机构时,定位气缸的活塞杆伸入将该压合空间上方的所有压合板停住,然后压合底座下降,使得该层压合板中的压合空间打开以便接受待胶合防盗门。
上述的智能热压胶合机的新型胶合装置可进一步设置为:所述传动结构包括架设于机体上部与驱动电机处于同一水平面且相对设置的第一链轮轴及第二链轮轴,第一链轮轴及第二链轮轴上均设置有链轮,驱动电机的电机轴上设置传动链轮并分别通过同步带与第一、第二链轮轴上的链轮同步连接,所述第一、第二链轮轴两端分别设有主动链轮,机体下部在主动链轮相对应位置架设有从动链轮,主动链轮与从动链轮之间通过链条同步转动,所述链条上安装有链条拉板,链条拉板一端与胶合底座固定连接。
采用上述技术方案,通过驱动电机带动第一、第二链轮轴转动,第一、第二链轮轴两端分别设置主动链轮,在机体下方与主动链轮相对应位置设置从动链轮通过链条实现主动、从动链轮之间的传动,为了保证胶合底座及压合板尽量处于水平位置进行升降,因此、第一链轮轴、第二链轮轴上的主动链轮及机体下部的从动链轮布设在压合板的四周设置,通过各链条上设置的链条拉板带动胶合底座上升或下降从而联动压合板沿第二导向结构上升或使压合板在自身及上部压合板的重力作用下沿第二导向结构下降。
上述的智能热压胶合机的新型胶合装置可进一步设置为:所述第一导向结构包括设置于机体中且位于压合板四周的至少四个导向齿条,所述胶合底座两侧均穿设有同步轴,所述同步轴两端在导向齿条相对应位置设有与导向齿条啮合设置的导向齿轮,所述第二导向结构包括各压合板在导向齿条相对应位置设置的导向块,所述导向块上设有与导向齿条啮合设置的镶块。
采用上述技术方案,通过机体中在压合板四周设置的至少四根导向齿条与胶合底座同步轴上设置的导向齿轮的配合对胶合底座实现导向,通过在各压合板靠近导向齿条的位置设置导向块,导向块上安装镶块,镶块上设置与导向齿条啮合设置的齿形,通过导向块与导向齿条的配合对压合板的升降进行导向。
上述的智能热压胶合机的新型胶合装置可进一步设置为:位于最上方的压合板上方设置有配重箱,所述配重箱两侧架均架设有第二同步轴,所述第二同步轴上设置与导向齿条啮合设置的第二同步齿轮。
采用上述技术方案,由于胶合装置在进行胶合时需要对待胶合防盗门施加一定的压力,因此在压合板上方设置配重箱,配重箱为实心,当胶合底座下降时,所有压合板在配重箱的作用下沿第二导向结构下降。
本发明的有益效果为:采用电机驱动的方式驱动压合板上升,上升距离控制精准且设有定位结构压合空间定位快速。
下面结合附图和实施例对本发明作进一步详细说明。
附图说明
图1为本发明实施例的立体示意图1。
图2为本发明实施例的立体示意图2。
图3为本发明实施例去掉机体四周钣金后的立体示意图1。
图4为本发明实施例去掉机体四周钣金后的立体示意图2。
图5为本发明实施例去掉机体四周钣金后的立体示意图3。
图6为本发明实施例去掉机体四周钣金后的立体示意图4。
图7为本发明实施例的导向块与镶块装配结构示意图。
具体实施方式
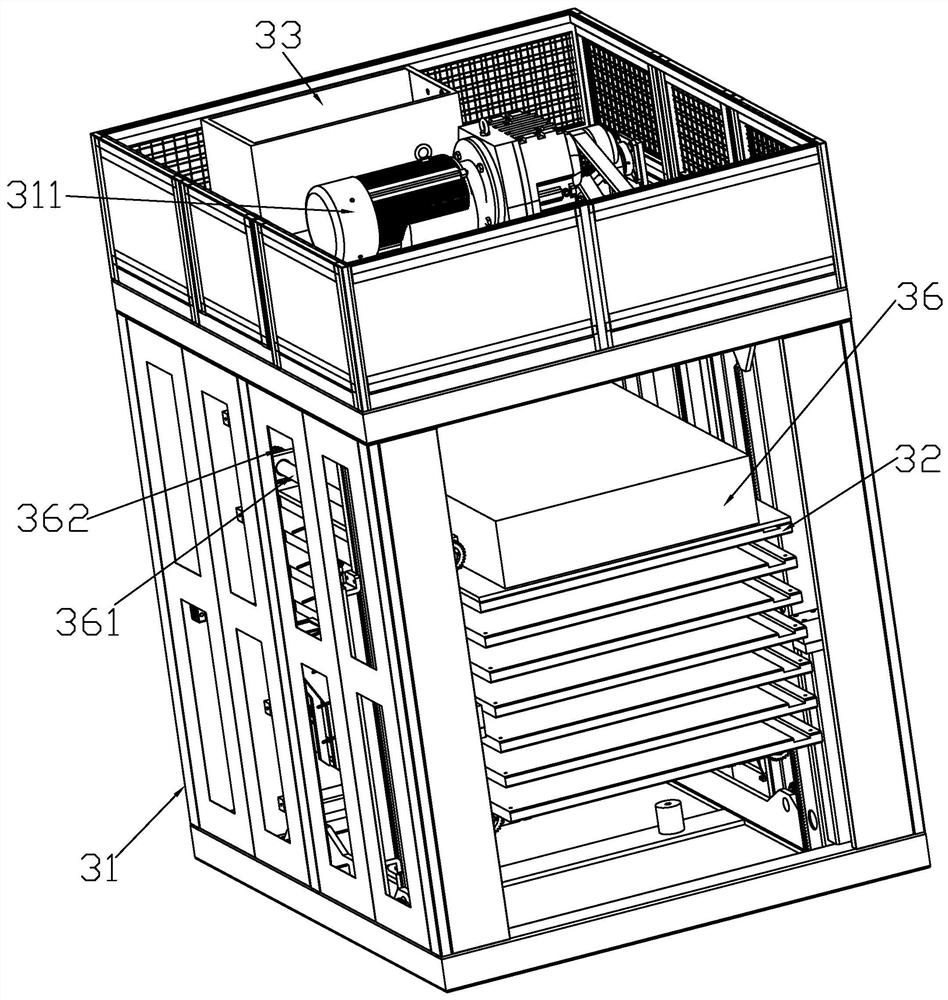
参见图1-图7示:智能热压胶合机的新型胶合装置,包括机体31,架设于机体31上并呈成叠设置的若干块压合板32及驱动压合板32压紧或分离的驱动机构,各压合板32之间均具有压合空间,机体31上设有可对压合板32内部添加热能的热能发生器33,各压合板32之间的压合空间四周设置有与待胶合防盗门厚度一致的垫块(图中未示出);
驱动机构包括设于机体31上部的驱动电机311,设置于机体31中并位于最下方压合板32下部可沿机体31纵向升降的胶合底座312及设置于驱动电机311与胶合底座312之间可促使胶合底座312沿机体纵向升降的传动结构,胶合底座312与机体31之间设有第一导向组件,压合板32与机体31之间设有第二导向组件,压合板32成叠设置于胶合底座312之上通过胶合底座312的上升从而联动压合板32上升,机体31周向在与外部输入装置高度适配位置设有在压合板32上升或下降过程中对压合空间进行选择的定位结构,
定位结构为设置于机体31周向的至少四个定位气缸313,定位气缸313的活塞杆3131朝向压合空间设置;
传动结构包括架设于机体31上部与驱动电机311处于同一水平面且相对设置的第一链轮轴314及第二链轮轴315,第一链轮轴314及第二链轮轴315上均设置有链轮316,驱动电机311的电机轴上设置传动链轮3111并分别通过同步带3112与第一链轮轴314、第二链轮轴上315的链轮316同步连接,第一链轮轴314、第二链轮轴315两端分别设有主动链轮3141,机体31下部在主动链轮3141相对应位置架设有从动链轮3142,主动链轮3141与从动链轮3142之间通过链条3143同步转动,链条3143上安装有链条拉板3144,链条拉板3144一端与胶合底座312固定连接;
第一导向结构包括设置于机体31中且位于压合板32四周的四个导向齿条35,胶合底座312两侧均穿设有同步轴3121,同步轴3121两端在导向齿条35相对应位置设有与导向齿条35啮合设置的导向齿轮3122,第二导向结构包括各压合板32在导向齿条35相对应位置设置的导向块321,导向块321上设有与导向齿条35啮合设置的镶块322,(镶块322上的齿图中未示出),位于最上方的压合板32上方设置有配重箱36,配重箱36两侧架均架设有第二同步轴361,第二同步轴361上设置与导向齿条35啮合设置的第二同步齿轮362。
- 智能热压胶合机的新型胶合装置
- 一种智能单件流热压胶合机