导航装置及方法
文献发布时间:2023-06-19 19:16:40
技术领域
本发明是关于一种导航装置及方法。具体而言,本发明是关于一种关于物件的语意标签比对的导航装置及方法。
背景技术
现有的导航服务,通常需要使用者输入精确的商店名称、完整地址或坐标等信息,才能搜寻到导航的目标地点,进而为使用者产生导航路径。然而,当使用者仅能输入关于目标地点的部分相关信息时,现有的导航服务无法智能地协助使用者寻找导航的目标地点。
此外,既有的地图数据维护需要透过专门的探勘车队,通过特殊的运输载具搭载各类感测器以获取环境数据与物件特征。举例而言,用于高精地图的数据采集系统通常是配备有多个整合感测器(如:LiDAR、GPS、IMU等)的运输工具,借以获取道路和周围物体的特征以更新地图数据。由于实际探勘的成本高且相当耗时,因此一般无法在短时间内再次实际探勘同区域,使得目前地图数据可能与实际仍存在的物件(例如:商店)有差异。
有鉴于此,如何提供一种关于物件的语意标签比对的导航技术以快速进行目标导航,并可进一步进行地图数据更新,乃业界亟需努力的目标。
发明内容
本发明的一目的在于提供一种导航装置。导航装置包含储存器、收发接口及处理器,处理器电性连接至储存器及收发接口。储存器储存地图数据,其中地图数据包含多个物件及对应等物件中各者的多个语意标签,每一所述语意标签分别用以描述对应的各该物件。处理器接收输入数据及至少一定位信息。处理器对输入数据执行语意分析,以产生多个语意信息。处理器从所述多个语意信息中选择至少其中之一作为筛选条件。处理器比对筛选条件及地图数据中的所述多个语意标签,以判断所述多个语意标签中是否具有符合筛选条件的至少一第一语意标签。当判断所述多个语意标签中具有至少一第一语意标签时,处理器产生比对结果,其中比对结果与至少一第一语意标签所对应的物件相关。处理器根据比对结果与至少一定位信息,产生导航路线。
本发明的另一目的在于提供一种导航方法,导航方法用于电子装置,电子装置包含储存器、收发接口及处理器。储存器储存地图数据,其中地图数据包含多个物件及对应所述多个物件中各者的多个语意标签,每一所述语意标签分别用以描述对应的各该物件。导航方法由处理器所执行,且包含下列步骤:接收输入数据及至少一定位信息;对输入数据执行语意分析,以产生多个语意信息;从所述多个语意信息中选择至少其中之一作为筛选条件;比对筛选条件及地图数据中的所述多个语意标签,以判断所述多个语意标签中是否具有符合筛选条件的至少一第一语意标签;当判断所述多个语意标签中具有至少一第一语意标签时,产生比对结果,其中比对结果与至少一第一语意标签所对应的物件相关;根据比对结果与至少一定位信息,产生导航路线。
在本发明的一实施方式中,其中该处理器还用以:根据该比对结果自一外部地图数据服务器接收一区域地图数据,根据该区域地图数据、该比对结果与该至少一定位信息产生该导航路线。
在本发明的一实施方式中,其中该导航装置还包含:至少一定位感测器,电性连接至该处理器,用以产生该至少一定位信息。
在本发明的一实施方式中,其中该处理器还用以:基于该至少一定位信息,产生一空间筛选条件;以及基于该空间筛选条件,更新该筛选条件。
在本发明的一实施方式中,其中该处理器还用以:当判断所述多个语意标签中不具有该至少一第一语意标签时,根据该至少一定位信息识别一即时物件特征,以产生一物件特征识别结果;比对该筛选条件及该物件特征识别结果,以判断该物件特征识别结果是否符合该筛选条件;以及当判断该物件特征识别结果符合该筛选条件时,根据该物件特征识别结果与该至少一定位信息,产生该导航路线。
在本发明的一实施方式中,其中该处理器还用以:当判断该物件特征识别结果符合该筛选条件时,根据该至少一定位信息及该筛选条件,产生一新物件及对应该新物件的一新语意标签,以更新该地图数据。
在本发明的一实施方式中,其中该处理器还用以:基于该至少一定位信息及该筛选条件,产生一新物件及对应该新物件的一新语意标签,以更新该地图数据。
在本发明的一实施方式中,其中该处理器还用以:将所述多个语意信息输入至一第一外部数据库,从该第一外部数据库中搜寻与所述多个语意信息相关的至少一搜寻数据;比对该至少一搜寻数据及该物件特征识别结果,以判断该物件特征识别结果是否符合该搜寻数据;以及当该物件特征识别结果符合该搜寻数据时,根据该搜寻数据与该至少一定位信息产生该导航路线,并根据该搜寻数据更新该地图数据。
在本发明的一实施方式中,其中该处理器还用以:将所述多个语意信息输入一第二外部数据库,从该第二外部数据库中搜寻与所述多个语意信息相关的至少一外部数据;以及基于该至少一外部数据,更新该地图数据中对应该新物件的该新语意标签。
在本发明的一实施方式中,还包含下列步骤:根据该比对结果自一外部地图数据服务器接收一区域地图数据,根据该区域地图数据、该比对结果与该至少一定位信息产生该导航路线。
在本发明的一实施方式中,其中该电子装置还包含:至少一定位感测器,电性连接至该处理器,用以产生该至少一定位信息。
在本发明的一实施方式中,还包含下列步骤:基于该至少一定位信息,产生一空间筛选条件;以及基于该空间筛选条件,更新该筛选条件。
在本发明的一实施方式中,还包含下列步骤:当判断所述多个语意标签中不具有该至少一第一语意标签时,根据该至少一定位信息识别一即时物件特征,以产生一物件特征识别结果;比对该筛选条件及该物件特征识别结果,以判断该物件特征识别结果是否符合该筛选条件;以及当判断该物件特征识别结果符合该筛选条件时,根据该物件特征识别结果与该至少一定位信息,产生该导航路线。
在本发明的一实施方式中,还包含下列步骤:当判断该物件特征识别结果符合该筛选条件时,根据该至少一定位信息及该筛选条件,产生一新物件及对应该新物件的一新语意标签,以更新该地图数据。
在本发明的一实施方式中,还包含下列步骤:基于该至少一定位信息及该筛选条件,产生一新物件及对应该新物件的一新语意标签,以更新该地图数据。
在本发明的一实施方式中,还包含下列步骤:将所述多个语意信息输入至一第一外部数据库,从该第一外部数据库中搜寻与所述多个语意信息相关的至少一搜寻数据;比对该至少一搜寻数据及该物件特征识别结果,以判断该物件特征识别结果是否符合该搜寻数据;以及当该物件特征识别结果符合该搜寻数据时,根据该搜寻数据与该至少一定位信息产生该导航路线,并根据该搜寻数据更新该地图数据。
在本发明的一实施方式中,还包含下列步骤:将所述多个语意信息输入一第二外部数据库,从该第二外部数据库中搜寻与所述多个语意信息相关的至少一外部数据;以及基于该至少一外部数据,更新该地图数据中对应该新物件的该新语意标签。
本发明所提供的导航技术(至少包含装置及方法),通过对于输入数据执行语意分析产生多个语意信息,从所述多个语意信息中选择至少其中之一作为筛选条件,再比对筛选条件及地图数据中的所述多个语意标签,以判断所述多个语意标签中是否具有符合筛选条件的至少一第一语意标签,当判断所述多个语意标签中具有至少一第一语意标签时,产生比对结果,根据比对结果与至少一定位信息产生导航路线。本发明所提供的导航技术通过分析语意信息及比对地图数据物件的语意标签产生导航路线,解决习知技术无法智能地协助使用者寻找导航的目标地点的问题。此外,本发明亦提供即时更新地图数据的技术,解决习知技术无法即时更新地图数据的问题。
以下结合附图阐述本发明的详细技术及实施方式,以使本发明所属技术领域中具有通常知识者能理解所请求保护的发明的技术特征。
附图说明
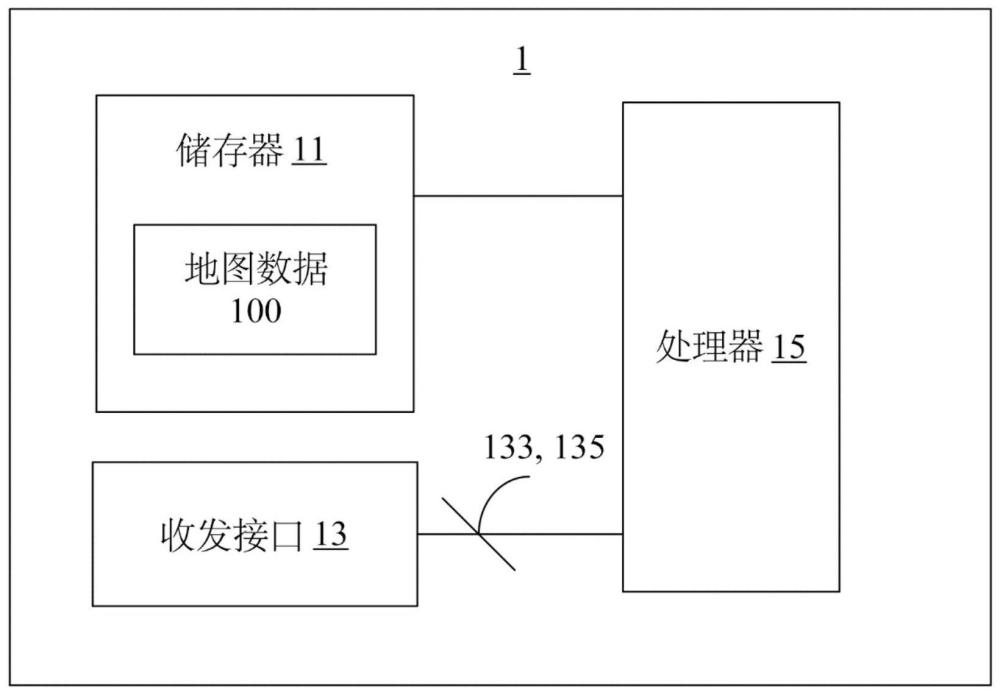
图1是描绘第一实施方式的导航装置的架构示意图;
图2是描绘第一实施方式的地图数据的示意图;
图3是描绘某些实施方式的导航装置的架构示意图;以及
图4是描绘第二实施方式的导航方法的部分流程图。
【符号说明】
1:导航装置
11:储存器
13:收发接口
15:处理器
100:地图数据
133:输入数据
135:定位信息
OB1、OB2:物件
ST1、ST2、ST3、ST4、ST5:语意标签
17a、17b、……、17n:定位感测器
S401、S403、S405、S407、S409、S411:步骤
具体实施方式
以下将透过实施方式来解释本发明所提供的一种导航装置及方法。然而,该等实施方式并非用以限制本发明需在如该等实施方式所述的任何环境、应用或方式方能实施。因此,关于实施方式的说明仅为阐释本发明的目的,而非用以限制本发明的范围。应理解,在以下实施方式及附图中,与本发明非直接相关的元件已省略而未绘示,且各元件的尺寸以及元件间的尺寸比例仅为例示而已,而非用以限制本发明的范围。
本发明的第一实施方式为导航装置1,其架构示意图是描绘于图1。导航装置1包含储存器11、收发接口13及处理器15,处理器15电性连接至储存器11及收发接口13。储存器11可为记忆体、通用串列总线(Universal Serial Bus;USB)盘、硬盘、光盘、随身盘或本发明所属技术领域中具有通常知识者所知且具有相同功能的任何其他储存媒体或电路。收发接口13为可接收及传输数据的接口或本发明所属技术领域中具有通常知识者所知悉的其他可接收及传输数据的接口。处理器15可为各种处理单元、中央处理单元(CentralProcessing Unit;CPU)、微处理器或本发明所属技术领域中具有通常知识者所知悉的其他计算装置。
于某些实施方式中,导航装置1可为但不限于穿戴式装置、移动式电子装置、或是安装于交通工具上的电子装置等等。举例而言,可将导航装置1应用于室内空间,以通过导航装置1进行室内空间的导览。
于本发明的第一实施例中,处理器15接收使用者输入的输入数据及至少一定位信息(即,包含一个或多个)。接着,处理器15对输入数据执行语意分析,以产生多个语意信息。随后,处理器15从多个语意信息中选择其中之一作为筛选条件,处理器15比对筛选条件及地图数据中的语意标签,以判断语意标签中是否具有符合筛选条件的第一语意标签(即,包含一个或多个)。最后,当处理器15判断语意标签中具有第一语意标签时,产生比对结果,且处理器15根据比对结果与定位信息,产生导航路线。以下段落将详细说明与本发明相关的实施细节,请参考图1。
于本实施方式中,储存器11储存地图数据100,地图数据100包含多个物件及分别对应每一物件的多个语意标签,语意标签分别用以描述对应的物件。举例而言,地图数据100可为高精地图(High Definition Map,HD Map),高精地图中记录了地图中的各个物件及对应各物件的语意标签(例如:高精地图中的语意地图(semantic map)),各个语意标签包含对应至物件的相关信息。须说明者,地图数据100可能包含各种物件及语意标签,以餐厅的物件为例,各个语意标签可能包含餐厅的地址、路名、周边地标、周边店家、评价、菜单、推荐菜色等等的内容信息,本发明并未限制语意标签可能包含的内容。
为便于理解,图2例示了地图数据100中包含物件及多个语意标签(Semantic Tag)的一种态样。图2中包含物件OB1“牛排店A”及物件OB2“牛排店B”,物件OB1“牛排店A”具有语意标签ST1“敦化路”、语意标签ST2“民生路”、语意标签ST3“麦当劳旁边”及语意标签ST4“牛排店”。物件OB2“牛排店B”具有语意标签ST1“民生路”、语意标签ST2“敦化路”、语意标签ST3“推荐菜单:丁骨牛排”、语意标签ST4“牛排店”及语意标签ST5“美味”。须说明者,图2仅方便作为例示,但其非用以限制本发明的范围,实际运作中地图数据100中的物件及该等语意标签尚包含其他必要内容,亦可以不同形式的方式储存,因此任何关于物件及物件带有信息内容的方法均属于本发明所要保护的范围。
于本实施方式中,导航装置1先接收输入数据133及至少一定位信息135。举例而言,使用者可透过语音或是文字的方式,表达欲前往的目的地的相关信息,因此输入数据133可为由麦克风接收的语音输入或是由面板等装置产生的文字输入。另外,定位信息135可包含导航装置1的座标位置、导航装置1周围的3D点云信息、导航装置1的前影像、导航装置1的侧影像及导航装置1的后影像等至少其中之一或其组合。
于某些实施方式中,导航装置1还包含至少一定位感测器(即,包含一个或多个)。如图3所示,导航装置1还包含定位感测器17a、17b、……、17n,定位感测器17a至17n电性连接至处理器15,且定位感测器17a至17n用以产生关于导航装置1的定位信息135。须说明者,定位感测器17a、17b、……、17n可为全球定位系统、照相机及光学雷达等定位感测器的至少其中之一或其组合,用以产生如导航装置1的座标位置、导航装置1周围的3D点云信息、导航装置1的前影像、导航装置1的侧影像及导航装置1的后影像等信息。举例而言,当导航装置1应用于自驾车时,导航装置1可透过自驾车上配置的相机、雷达、光学雷达等装置接收影像或3D点云图等信息,以辅助导航装置1进行后续的分析及判断。
于本实施方式中,为了准确的分析输入数据133的语意,处理器15接着对输入数据133执行语意分析,以产生多个语意信息。随后,处理器15从该等语意信息中选择至少其中之一作为筛选条件。具体而言,处理器15可透过自动语音辨识(Automatic SpeechRecognition;ASR)、计算机语音识别(Computer Speech Recognition;CSR)、语音转文字识别(Speech To Text;STT)、同义字分析等运作对输入数据133执行语意分析,自输入数据133提取出与目的相关的多个语意信息。须说明者,使用何种语意分析的方法非本发明的重点,本发明所属技术领域中具有通常知识者应可根据上述说明理解其内容,故不赘言。
于某些实施方式中,处理器15还基于定位信息135,产生空间筛选条件,且基于空间筛选条件,更新筛选条件。举例而言,处理器15可基于定位信息135定位导航装置1目前的位置,将空间筛选条件设为5公里内,以缩小地图数据的搜索范围。因此,处理器15在进行后续比对时,仅会基于导航装置1周边位置距离5公里内的地图数据中的物件进行搜寻。于某些实施方中,处理器15亦可直接指定比对地图数据中的特定城市区域(例如:台北市中山区)。须说明者,本发明不限定使用任何习知的空间定位技术。举例而言,可采用传统GPS定位、融合感测信息进行定位(例如:GPS结合装置周围图像和/或点云图信息)、历史路径的轨迹定位。
于本实施方式中,处理器15接着比对筛选条件及地图数据100中的语意标签,以判断语意标签中是否具有符合筛选条件的第一语意标签。须说明者,本发明并未局限处理器15用以比对语意标签中是否出现关键字的方法,任何可用于比对关键字的方法都应属于本发明欲保护的范围。
于本实施方式中,当处理器15判断语意标签中具有第一语意标签时,产生比对结果,其中比对结果与第一语意标签所对应的物件相关。最后,处理器15根据比对结果与等定位信息,产生导航路线。
为便于理解,以一完整范例举例而言,但其非用以限制本发明的范例。在本范例中,导航装置1接收到的输入数据133为“导航至敦化路及民生路交叉口麦当劳旁边的牛排店”。首先,处理器15对输入数据133执行语意分析后,产生“敦化路”、“民生路”、“麦当劳”及“牛排店”等语意信息。随后,处理器15将“敦化路”、“民生路”、“麦当劳”及“牛排店”均作为筛选条件。
接着,处理器15将筛选条件中的“敦化路”、“民生路”、“麦当劳”及“牛排店”分别与地图数据100中的语意标签比对,判断地图数据100中是否有物件对应的语意标签具有“敦化路”、“民生路”、“麦当劳”及“牛排店”的关键字。以图2的地图数据100举例而言,地图数据100中的物件OB1“牛排店A”的语意标签ST1、ST2、ST3及ST4,分别包含“敦化路”、“民生路”、“麦当劳”及“牛排店”的关键字。地图数据100中的物件OB2“牛排店B”的语意标签ST2、ST1及ST4,分别包含“敦化路”、“民生路”“及“牛排店”的关键字。因此,处理器15在比对筛选条件与地图数据100中的语意标签时,判断筛选条件与“牛排店A”具有的语意标签完全符合,因此产生“牛排店A”为比对结果。最后,处理器15基于导航装置1的定位位置,产生至“牛排店A”的导航路线。
须说明者,于某些实施方式中,处理器15亦可基于比对符合筛选条件的语意标签数量及门槛值来产生比对结果。例如:当物件OB3的语意标签具有超过n笔符合筛选条件时(其中n为一正整数),处理器15亦可将物件OB3加入比对结果中。
又举例而言,当输入数据133为“敦化路及民生路交叉口的牛排店美味吗”时,处理器15亦同样执行上述运作。首先,处理器15对输入数据133执行语意分析后,产生“敦化路”、“民生路”、“牛排店”及“美味”等等语意信息。随后,处理器15将“敦化路”、“民生路”、“牛排店”及“美味”均作为筛选条件。处理器15在比对筛选条件与地图数据100中的语意标签时,判断筛选条件与“牛排店B”具有的语意标签与完全符合,因此产生“牛排店B”为比对结果。最后,处理器15基于导航装置1的定位位置,产生至“牛排店B”的导航路线。
于某些实施方式中,在处理器15产生比对结果后,可通过显示装置(未绘示),提供给使用者进行确认,由使用者确认导航目的地之后再进行目标导航。举例而言,当比对结果出现超过二间以上的商店时,由显示装置显示多笔比对结果,由使用者确认哪间商店才是有兴趣的导航目标。
承上述,由于完整的地图数据100的数据量庞大,导航装置1的储存器11可能不够储存完整的地图数据100(例如:设置于车辆上的导航装置1)。于某些实施方式中,处理器15可根据比对结果自外部地图数据服务器(例如:云端服务器)接收区域地图数据,且处理器15根据区域地图数据、比对结果及该等定位信息产生导航路线。
此外,于某些实施方式中,当处理器15无法从地图数据100中比对到符合筛选条件的语意标签时,代表地图数据100可能因为尚未更新商店信息而不具有这笔数据(例如:原地址已搬迁更换其他商店)。在这情况下,导航装置1的储存器11可预先储存各个物件对应的物件特征,例如:麦当劳的图像数据或立体图案、牛排店的标志、各种店家的文字符号、各种店家的商标形状、各种店家的招牌形状,或是任何可用以辨识店家的物件特征等等。因此,导航装置1可透过全球定位系统、照相机及光学雷达等定位感测器产生的定位信息135,即时的对于定位信息135进行即时物件特征比对,以判断是否在目前导航装置1周围有出现符合筛选条件的物件出现,以进一步提醒使用者注意或是进行目标导航。具体而言,处理器15还用以当判断语意标签中不具有第一语意标签时,根据定位信息135识别即时物件特征,以产生物件特征识别结果。接着,处理器15比对筛选条件及物件特征识别结果,以判断物件特征识别结果是否符合筛选条件。最后,当处理器15判断物件特征识别结果符合筛选条件时,根据物件特征识别结果与定位信息,产生导航路线。
于某些实施方式中,当处理器15判断物件特征识别结果符合筛选条件时,根据定位信息及筛选条件,产生新物件及对应新物件的新语意标签,以更新地图数据100。
须说明者,导航装置1可透过分析影像(例如:影像、3D点云图等等),即时辨识影像/点云图中物件的特征,并透过现有的各种分析方法执行分析/分类(例如:卷积神经网络(CNN)、3D卷积神经网络(3D CNN))并识别物件特征,以判断是否出现目标物件(例如:麦当劳的商标图像、牛排店的标志、各种店家的文字等等)。
于某些实施方式中,导航装置1可持续更新地图数据100,而不须在处理器15无法找到比对地图数据100中的语意标签符合筛选条件时,才启动地图数据100的更新。具体而言,处理器15基于定位信息及筛选条件,产生新物件及对应新物件的新语意标签,以更新地图数据100。
于某些实施方式中,处理器15可透过兴趣点(Point Of Interest;POI)数据库、搜寻引擎等外部数据库取得物件的相关数据,进一步确认物件特征识别结果与物件的相关数据是否与相符(例如:比对导航装置1座标与店家座标是否相同),并更新更新地图数据100的物件及语意标签。具体而言,处理器15将该等语意信息输入至第一外部数据库,从第一外部数据库中搜寻与语意信息相关的至少一搜寻数据。接着,处理器15比对至少一搜寻数据及物件特征识别结果,以判断物件特征识别结果是否符合搜寻数据。最后,当物件特征识别结果符合搜寻数据时,处理器15根据搜寻数据与定位信息产生导航路线,并根据搜寻数据更新地图数据100。
于某些实施方式中,处理器15可透过搜寻引擎等外部数据库取得物件的相关数据(例如:社群媒体信息、评价、菜单、价格、推荐菜色等),并将物件的相关数据更新至地图数据100。具体而言,处理器15将语意信息输入第二外部数据库,从第二外部数据库中搜寻与语意信息相关的外部数据。接着,处理器15基于外部数据,更新地图数据100中对应新物件的新语意标签。
由上述说明可知,本发明所提供的导航装置1,通过对于输入数据执行语意分析产生多个语意信息,从语意信息中选择至少其中之一作为筛选条件,再比对筛选条件及地图数据中的语意标签,以判断语意标签中是否具有符合筛选条件的第一语意标签,当判断语意标签中具有第一语意标签时,产生比对结果,根据比对结果与定位信息产生导航路线。本发明所提供的导航装置1通过分析语意信息及比对地图数据物件的语意标签产生导航路线,解决习知技术无法智能地协助使用者寻找导航的目标地点的问题。此外,本发明亦提供即时更新地图数据的技术,解决习知技术无法即时更新地图数据的问题。
本发明的第二实施方式为一导航方法,其流程图是描绘于图4。导航方法400适用于一电子装置,例如:第一实施方式所述的导航装置1。电子装置储存地图数据,例如:第一实施方式的地图数据100。导航方法400透过步骤S401至步骤S411产生导航路线。
于某些实施方式中,导航方法400还包含下列步骤:根据比对结果自外部地图数据服务器接收区域地图数据。根据区域地图数据、比对结果与定位信息产生导航路线。
于某些实施方式中,电子装置还包含至少一定位感测器(例如:第一实施方式所述的定位感测器17a、17b、……、17n),至少一定位感测器电性连接至处理器,用以产生定位信息。
于步骤S401,由电子装置接收输入数据及至少一定位信息。于步骤S403,由电子装置对输入数据执行语意分析,以产生多个语意信息。
于步骤S405,由电子装置从语意信息中选择至少其中之一作为筛选条件。于某些实施方式中,导航方法400还包含下列步骤:基于定位信息,产生空间筛选条件。基于空间筛选条件,更新筛选条件。
于步骤S407,由电子装置比对筛选条件及地图数据中的语意标签,以判断语意标签中是否具有符合筛选条件的第一语意标签。接着,于步骤S409,当判断语意标签中具有第一语意标签时,由电子装置产生比对结果,其中比对结果与第一语意标签所对应的物件相关。随后,于步骤S411,由电子装置根据比对结果与定位信息,产生导航路线。
于某些实施方式中,导航方法400还包含下列步骤:当判断语意标签中不具有第一语意标签时,根据定位信息识别即时物件特征,以产生物件特征识别结果。比对筛选条件及物件特征识别结果,以判断物件特征识别结果是否符合筛选条件。当判断物件特征识别结果符合筛选条件时,根据物件特征识别结果与定位信息,产生导航路线。
于某些实施方式中,导航方法400还包含下列步骤:当判断物件特征识别结果符合筛选条件时,根据定位信息及筛选条件,产生新物件及对应新物件的新语意标签,以更新地图数据。
于某些实施方式中,导航方法400还包含下列步骤:基于定位信息及筛选条件,产生新物件及对应新物件的新语意标签,以更新地图数据。
于某些实施方式中,导航方法400还包含下列步骤:将语意信息输入至第一外部数据库,从第一外部数据库中搜寻与语意信息相关的搜寻数据。比对搜寻数据及物件特征识别结果,以判断物件特征识别结果是否符合搜寻数据。当物件特征识别结果符合搜寻数据时,根据搜寻数据与定位信息产生导航路线,并根据搜寻数据更新地图数据。
于某些实施方式中,导航方法400还包含下列步骤:将语意信息输入一二外部数据库,从第二外部数据库中搜寻与语意信息相关的外部数据。以及基于外部数据,更新地图数据中对应新物件的新语意标签。
除了上述步骤,第二实施方式亦能执行第一实施方式所描述的导航装置1的所有运作及步骤,具有同样的功能,且达到同样的技术效果。本发明所属技术领域中具有通常知识者可直接了解第二实施方式如何基于上述第一实施方式以执行此等运作及步骤,具有同样的功能,并达到同样的技术效果,故不赘述。
需说明者,于本发明专利说明书及权利要求书中,某些用语(包含:语意标签及外部数据库)前被冠以“第一”或“第二”,该等“第一”及“第二”仅用来区分不同的用语。例如:第一外部数据库及第二外部数据库中的“第一”及“第二”仅用来表示不同实施方式所使用的外部数据库。
综上所述,本发明所提供的导航技术(至少包含装置及方法),通过对于输入数据执行语意分析产生多个语意信息,从语意信息中选择其中之一作为筛选条件,再比对筛选条件及地图数据中的语意标签,以判断语意标签中是否具有符合筛选条件的第一语意标签,当判断语意标签中具有第一语意标签时,产生比对结果,根据比对结果与定位信息产生导航路线。本发明所提供的导航技术通过分析语意信息及比对地图数据物件的语意标签产生导航路线,解决习知技术无法智能地协助使用者寻找导航的目标地点的问题。此外,本发明亦提供即时更新地图数据的技术,解决习知技术无法即时更新地图数据的问题。
上述实施方式仅用来例举本发明的部分实施态样,以及阐释本发明的技术特征,而非用来限制本发明的保护范畴及范围。任何本发明所属技术领域中具有通常知识者可轻易完成的改变或均等性的安排均属于本发明所主张的范围,而本发明的权利保护范围以权利要求书为准。
- 导航方法、导航效果测试方法、装置、设备和介质
- 一种车辆直行导航方法以及车辆直行导航装置
- 一种无人作业谷物联合收割机导航方法与导航装置
- 用于车辆的导航装置、其方法以及导航系统
- 导航方法、导航装置、移动终端和计算机可读存储介质
- 车队导航系统、领航导航装置、从导航装置及其导航方法
- 车队导航系统、领航导航装置、从导航装置及其导航方法