抓握装置和包括抓握装置的机器人装置
文献发布时间:2023-06-19 19:38:38
技术领域
本公开的实施例涉及一种抓握装置和包括抓握装置的机器人装置,更具体地,涉及一种具有改进结构的抓握装置和包括抓握装置的机器人装置,在改进结构中,移动用作支撑点的铰链以获得适于抓握对象的力传递比。
背景技术
随着电子技术的发展,已经开发了各种类型的电子装置。具体地,最近已经开发了用于在工业现场或在医疗、空间、家务等领域中代替人类执行任务的各种类型的机器人装置。这样的机器人装置可包括用于执行各种任务(诸如,抓握对象、组装、传送、焊接等)的抓握装置。
为了使抓握装置抓握扁平的对象(诸如,盘子),在减小抓握装置的手状件间的间隙的同时获得较大的抓握力是重要的。与此相对,为了使抓握装置抓握高的对象(诸如,杯子),在增大抓握装置的手状件间的间隔的同时获得小的抓握力是重要的。
然而,相关技术的抓握装置一致地执行抓握操作而不论待抓握的对象的形状如何,因此抓握装置以低效方式被驱动。另外,使用齿轮方法或螺旋旋转方法的抓握装置的驱动速度低。
发明内容
技术问题
为了解决上述问题,本公开的实施例提供了一种具有改进结构的抓握装置以及包括抓握装置的机器人装置,在改进结构中,移动用作支撑点的铰链以获得适于抓握对象的力传递率。
技术方案
根据本公开的实施例,提供了一种抓握装置。所述抓握装置可包括:第一指状件;第二指状件,面向第一指状件;第一链接部分,包括第一引导槽并且被构造为支撑第一指状件;第二链接部分,包括第二引导槽,其中,第二链接部分与第一链接部分相交并被构造为支撑第二指状件;铰链,被构造为在第一引导槽和第二引导槽内移动,并在第一链接部分和第二链接部分的相交处连接第一链接部分和第二链接部分;第一致动器,被构造为移动第一链接部分和第二链接部分中的至少一个来调节第一指状件与第二指状件之间的间隙;以及第二致动器,被构造为在第一引导槽和第二引导槽内移动所述铰链。
根据本公开的实施例,第一链接部分还可包括:第一连杆,连接到第一指状件上的第一点;第二连杆,第二连杆连接到第一指状件上的第二点;以及第三连杆,连接到第二连杆并与第一指状件平行设置,第二链接部分还可包括:第四连杆,连接到第二指状件上的第一点;第五连杆,连接到第二指状件上的第二点并且与第四连杆平行设置;以及第六连杆,连接到第五连杆并且与第二指状件平行设置,以及第一引导槽形成在第二连杆中,并且第二引导槽形成在第五连杆中。
根据本公开的实施例,第三连杆的长度可等于第一指状件上的第一点与第二点之间的距离,并且第六连杆的长度可等于第二指状件上的第一点与第二点之间的距离。
根据本公开的实施例,第一致动器可被构造为调节第三连杆与第六连杆之间的间隙。
根据本公开的实施例,第一致动器可包括:第一驱动电机,被构造为沿第一方向移动第三连杆;以及第二驱动电机,被构造为沿与第一方向相反的第二方向移动第六连杆。
根据本公开的实施例,第二致动器可包括:第三驱动电机,被构造为在第一引导槽和第二引导槽内移动所述铰链。
根据本公开的实施例,第二致动器可包括:第三驱动电机,设置在第二连杆上并且被构造为沿着第一引导槽移动所述铰链;以及第四驱动电机,设置在第五连杆上并且被构造为沿着第二引导槽移动所述铰链。
根据本公开的实施例,第三驱动电机和第四驱动电机中的每一个可包括止转轭式驱动电机、齿条和小齿轮式驱动电机、或液压式驱动电机。
根据本公开的实施例,第二连杆和第五连杆可各自相对于第一指状件和第二指状件之间的空间具有凸形形状。
根据本公开的实施例,提供了一种机器人装置。所述机器人装置可包括:图像传感器,被配置为检测对象的形状和位置中的至少一个;抓握装置,具有链接部分,其中,所述抓握装置被构造为通过在所述链接部分上移动铰链来调节所述链接部分的支撑点,其中,所述链接部分相对于所述抓握装置的第一指状件、所述抓握装置的第二指状件、和所述铰链相交排列,并且所述链接部分被构造为支撑第一指状件和第二指状件;以及处理器,被配置为控制抓握装置将所述铰链定位成与由所述图像传感器检测到的所述对象相应。
根据本公开的实施例,所述链接部分可包括:第一链接部分,包括第一引导槽并且被构造为支撑第一指状件;以及第二链接部分,包括第二引导槽,其中,第二链接部分与第一链接部分相交并且被构造为支撑第二指状件,所述铰链可在第一引导槽和第二引导槽内移动,并且可在第一链接部分与第二链接部分的相交处连接第一链接部分和第二链接部分,并且所述抓握装置还可包括致动器,其中,所述致动器被构造为在第一引导槽和第二引导槽内移动所述铰链。
根据本公开的实施例,所述致动器可包括连接构件,其中,所述连接构件连接到所述铰链并且长度可变,并且所述处理器可被配置为根据由图像传感器检测到的对象的形状和位置中的至少一个来确定所述连接构件的长度,并且控制所述致动器以使所述连接构件的长度等于确定的长度。
根据本公开的实施例,所述机器人装置还可包括压力传感器,其中,所述压力传感器被配置为测量施加到第一指状件和第二指状件中的至少一个的压力,并且其中,所述处理器可被配置为基于由所述压力传感器测量的值控制所述抓握装置的抓握操作。
根据本公开的实施例,所述机器人装置还可包括:第一指状件上的第一距离传感器;以及第二指状件上的第二距离传感器,以及其中,所述处理器还可被配置为:基于第一距离传感器在所述机器人装置移动期间检测到所述对象,激活第二距离传感器;接收由第一距离传感器和第二距离传感器根据所述机器人装置的移动在多个点处检测到的距所述对象的距离有关的信息;以及基于接收到的所述信息来控制所述抓握装置的抓握操作。
附图说明
图1是根据本公开的实施例的抓握装置的侧视图。
图2是铰链被向后移动的图1的抓握装置的侧视图。
图3和图4是第三驱动电机和第四驱动电机的长度彼此不同的抓握装置的侧视图。
图5是第一链接部分和第二链接部分中的每一个被构造为单个连杆的抓握装置的侧视图。
图6是根据本公开的实施例的机器人装置的框图。
图7a至图7f是用于描述根据由距离传感器测量的值来控制抓握装置的抓握操作的处理的示图。
具体实施方式
提供以下描述的实施例作为非限制性示例以帮助理解本公开,并且应当理解的是,本公开的实施例可以以与这些实施例不同的各种形式来实现。在本公开的以下描述中,当确定相关的公知功能或组件将由于不必要的细节而模糊本公开的主题时,将不详细描述相关的公知功能或组件,并且未在附图中示出相关的公知功能或组件。在附图中,未以实际比例示出组件,并且一些组件的尺寸可能被放大以帮助理解本公开。
在本说明书和权利要求书中,考虑到本公开的功能来选择一般术语。然而,可根据本领域技术人员的意图、法律或技术解释、新技术的出现等来选择非通用术语。申请人可任意选择一些术语。这些术语可如本说明书中所定义的那样解释,并且当在本文中没有具体定义时,可基于本说明书的整体内容和相关技术领域中的技术常识来解释这些术语。
如本文所使用的,诸如“具有”、“可具有”、“包括”或“可包括”的表述旨在指示特征(例如,数值、功能、操作、机器部件的组件等)的存在,并且不排除附加特征的存在。
虽然本说明书描述了用于描述本公开的示例实施例的组件,但是本公开不必限于此。因此,可以改变或省略一些组件,并且可以添加其他组件。此外,组件可以分布和设置在不同的独立装置中。
尽管本文将参考附图和附图中所示的内容详细描述本公开的示例实施例,但是本公开不限于示例实施例或不受示例实施例限制。
在下文中,将参考附图更详细地描述本公开的实施例。
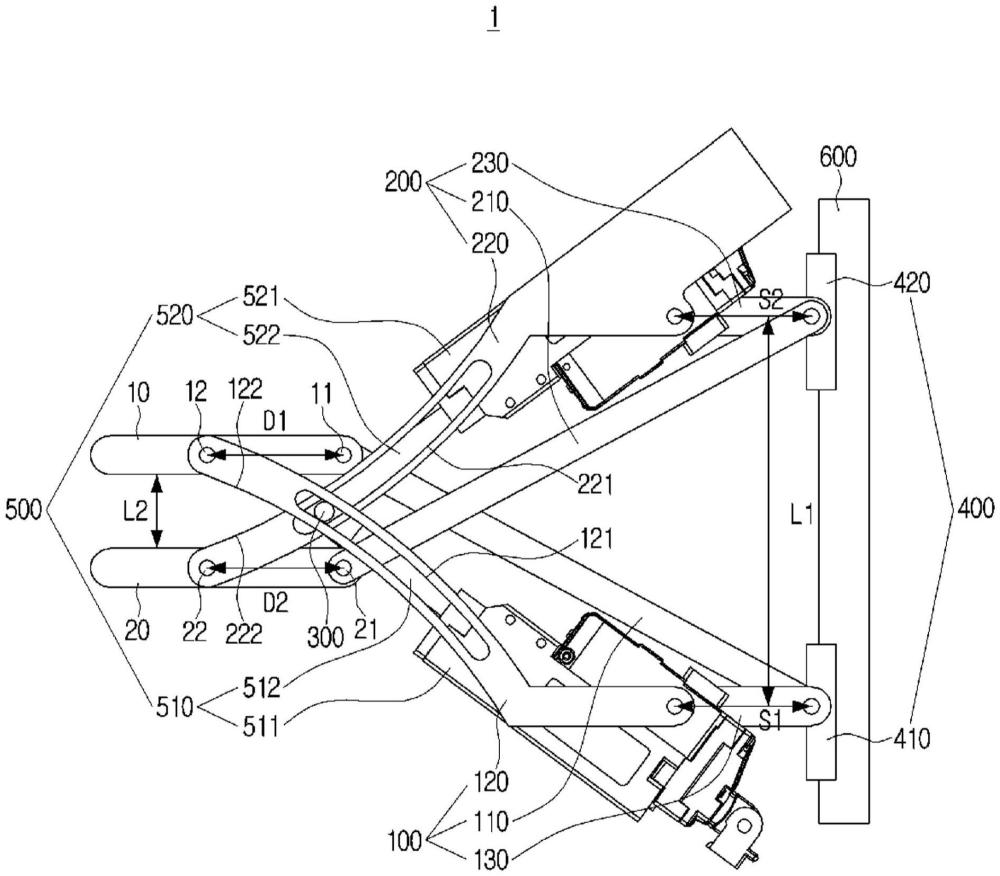
图1是根据本公开的实施例的抓握装置的侧视图。
参照图1,根据本公开的实施例的抓握装置1可包括第一指状件10、第二指状件20、第一链接部分100、第二链接部分200、铰链300、第一致动器400、第二致动器500和支撑件600。
第一指状件10和第二指状件20彼此相对地布置并且彼此间隔开一定距离,以形成用于在其中布置将被抓握的对象的空间。
第一指状件10和第二指状件20可由下面将描述的第一致动器400和第二致动器500驱动,并且第一指状件10与第二指状件20之间的间隙L2可通过由第一链接部分100和第二链接部分200传递的驱动力来调节。
第一链接部分100可设置有第一引导槽121并且可支撑第一指状件10。第二链接部分200可设置有第二引导槽221并且可支撑第二指状件20。
第一链接部分100和第二链接部分200中的每一个可具有四杆连杆结构。具体地,第一链接部分100和第二链接部分200中的每一个可包括依次彼此连接的三个连杆,并且三个连杆和第一指状件10或第二指状件20之间的总共四个接触点连接以形成闭环形状。
然而,第一链接部分100和第二链接部分200不限于上述结构,并且可各自实施为单个连杆。例如,第一链接部分100的单个连杆和第二链接部分200的单个连杆可在彼此相交连接的同时支撑第一指状件10和第二指状件20。
铰链300能够在第一引导槽121和第二引导槽221内移动,并且可在第一链接部分100和第二链接部分200的相交处连接第一链接部分100和第二链接部分200。
铰链300可用作第一链接部分100和第二链接部分200的支撑点。也就是说,第一链接部分100和第二链接部分200可围绕作为支撑点的铰链300旋转,从而执行抓握操作。
因为铰链300能够在第一引导槽121和第二引导槽221内移动,所以铰链300的位置可被改变为靠近或远离待抓握的对象。
因此,为了以大的抓握力抓握待抓握的对象,铰链300可被布置为靠近对象以增加力传递比,因此可以以小的驱动力有效地抓握对象。相反,为了以小的抓握力抓握待抓握的对象,铰链300可被布置为远离对象以减小力传递比,因此可在不改变驱动力的强度的情况下以相同的驱动力容易地抓握对象。
第一致动器400可移动第一链接部分100和第二链接部分200中的至少一个,以调节第一指状件10与第二指状件20之间的间隙L2。第一致动器400可调节将在下面描述的第三连杆130与第六连杆230之间的间隙L1。
具体地,因为第一致动器400增大或减小第一链接部分100的一端和第二链接部分200的一端之间的间隙L1,并且第一链接部分100和第二链接部分200围绕铰链300旋转,所以分别由第一链接部分100和第二链接部分200支撑的第一指状件10和第二指状件20之间的间隙L2也可增大或减小。
当抓握装置1执行抓握操作时,第一致动器400可向上移动第一链接部分100的一端并且向下移动第二链接部分200的一端。因此,第一链接部分100可围绕铰链300逆时针旋转,并且第二链接部分200可围绕铰链300顺时针旋转。随着第一链接部分100和第二链接部分200旋转,第一指状件10和第二指状件20可以彼此靠近地移动以加压并抓握第一指状件10与第二指状件20之间的对象。
相反,当抓握装置1执行卸下操作时,第一致动器400可向下移动第一链接部分100的一端并且向上移动第二链接部分200的一端。因此,第一链接部分100可围绕铰链300顺时针旋转,并且第二链接部分200可围绕铰链300逆时针旋转。随着第一链接部分100和第二链接部分200旋转,第一指状件10和第二指状件20可彼此远离地移动以卸下第一指状件10与第二指状件20之间对象。
第一致动器400可包括第一驱动电机410和第二驱动电机420,第一驱动电机410被构造为沿第一方向移动第一链接部分100的第三连杆130,第二驱动电机420被构造为沿与第一方向相反的第二方向移动第二链接部分200的第六连杆230。第一驱动电机410和第二驱动电机420可以是直线电机,但不限于此,并且第一驱动电机410和第二驱动电机420的类型不受限制,只要它们能够移动第三连杆130和第六连杆230即可。
也就是说,随着第一驱动电机410和第二驱动电机420沿相反方向移动第三连杆130和第六连杆230,第一指状件10和第二指状件20可执行抓握操作或卸下操作。
尽管第一致动器400被示出为包括用于移动第一链接部分100的第一驱动电机410以及用于移动第二链接部分200的第二驱动电机420,但第一致动器400不限于此。例如,第一致动器400可仅包括第一直线电机410,并且第二链接部分200的一端可固定在支撑件600上,使得可通过仅移动第一链接部分100来平滑地执行抓握操作和卸下操作。
第二致动器500可在第一引导槽121和第二引导槽221内移动铰链300。具体地,第二致动器500可仅包括第三驱动电机510以移动铰链300,或者可包括第三驱动电机510和第四驱动电机520两者以移动铰链300。
第三驱动电机510可包括主体511和连接构件512。第三驱动电机510的连接构件512的一端可连接到铰链300,并且连接构件512的长度可以是可变的。
具体地,连接构件512的长度可被改变为远离或靠近主体511,因此连接到连接构件512的铰链300可沿着第一引导槽121和第二引导槽221移动。
尽管第三驱动电机510被示出为布置在第一链接部分100的第二连杆120上,但实施例不限于此,并且主体511可在与铰链300相同的高度处固定在支撑件600上,以向前移动或向后移动铰链300。
第四驱动电机520可具有与上述第三驱动电机510相同的结构。也就是说,第四驱动电机520可包括主体521和连接构件522,连接构件522的一端可连接到铰链300,并且连接构件522的长度可以是可变的以远离或靠近主体521。
第三驱动电机510可被布置在第一链接部分100的第二连杆120上以沿着第一引导槽121移动铰链300。第四驱动电机520可被布置在第二链接部分200的第五连杆220上以沿着第二引导槽221移动铰链300。
第三驱动电机510的连接构件512和第四驱动电机520的连接构件522可移动以具有相同的长度或不同的长度。因此,不仅可向前移动或向后移动铰链300,而且可向上移动或向下移动铰链300,并且可扩大将由抓握装置1抓握的区域。这将在下面参照图3和图4详细描述。
第三驱动电机510和第四驱动电机520可以是各自具有可变长度的直线电机,并且可被实施为止转(scotch)轭式、齿条和小齿轮式、或液压式,但不限于此。
在下文中,将更详细地描述第一链接部分100和第二链接部分200的结构。
第一链接部分100可包括:第一连杆110,连接到第一指状件10上的第一点11;第二连杆120,连接到第一指状件10上的第二点12并与第一连杆110平行布置;以及第三连杆130,连接到第二连杆120并与第一指状件10平行布置。
第二链接部分200可包括:第四连杆210,连接到第二指状件20上的第一点21;第五连杆220,连接到第二指状件20上的第二点22并与第四连杆210平行布置;以及第六连杆230,连接到第五连杆220并与第二指状件20平行布置。
即使当第一链接部分100和第二链接部分200旋转时,第三连杆130和第六连杆230也可保持水平形状。第一引导槽121可形成在第二连杆120中,并且第二引导槽221可形成在第五连杆220中。
第三连杆130可具有等于第一指状件10上的第一点11与第二点12之间的距离D1的长度S1。第六连杆230可具有等于第二指状件20上的第一点21与第二点22之间的距离的长度S2。
由于第一连杆110、第二连杆120和第三连杆130具有上述结构,因此第一连杆110、第二连杆120和第三连杆130中的每一个和第一指状件10的区域具有与平行四边形基本相同的形状,因此第一指状件10可保持水平形状。
同样,由于第四连杆210、第五连杆220和第六连杆230具有上述结构,因此第四连杆210、第五连杆220和第六连杆230中的每一个和第二指状件20的区域具有与平行四边形基本相同的形状,因此第二指状件20可保持水平形状。
也就是说,根据本公开的实施例的抓握装置1具有如下结构:平行四边形形状的四杆连杆机构对称地支撑第一指状件10和第二指状件20,因此第一指状件10和第二指状件20能够在保持水平状态的同时稳定地抓握对象。
第二连杆120和第五连杆220可相对于第一指状件10与第二指状件20之间的空间具有凸形形状。也就是说,当从第一指状件10与第二指状件20之间的放置待抓握对象的空间向后观察时,第二连杆120和第五连杆220中的每一个的区域可具有凸形形状。
由此,第一指状件10与第二指状件20之间的空间变大,因此,即使是体积大的对象,也能够容易地被抓握。当执行抓握操作时,可在使待抓握对象与第一链接部分100和第二链接部分200之间的干扰最小化的同时容易地抓握对象。
支撑件600可以是机器人的手臂或身体部分,并且可支撑第一致动器400并提供第一致动器400移动的路径。尽管支撑件600被示出为具有竖直形状,但支撑件600不限于此。
图1示出以下示例:在抓握装置1中,移动第三驱动电机510的连接构件512和第四驱动电机520的连接构件522以增加连接构件512和连接构件522的长度,使得铰链300可被布置为靠近待抓握的对象。
为了通过抓握装置1抓握扁平的对象(例如,盘子),可使用第一指状件10与第二指状件20之间的窄间隙L2和大的抓握力来抓握扁平的对象。因此,如图1所示,通过由第三驱动电机510和第四驱动电机520将铰链300移动靠近扁平的对象,可在减小第一指状件10与第二指状件20之间的间隙L2的同时以高的力传递比容易地抓握扁平的对象。
图2是图1的铰链300被向后移动的状态的侧视图。
参照图2,与图1相比,随着第三驱动电机510的连接构件512和第四驱动电机520的连接构件522移动以减小连接构件512和连接构件522的长度,铰链300也可移动远离待抓握的对象。
为了通过抓握装置1抓握高的对象(例如,杯子),可使用第一指状件10与第二指状件20之间的大的间隙L2和低的抓握力来抓握对象。因此,如图2所示,通过由第三驱动电机510和第四驱动电机520将铰链300移动远离高的对象,也可在增加第一指状件10与第二指状件20之间的间隙L2的同时以低的力传递比容易地抓握对象。
也就是说,即使在使用相同的驱动源的情况下,根据本公开的实施方式的抓握装置1也能够通过改变第一指状件10与第二指状件20之间的间隙L2以及通过将用作支撑点的铰链300移动靠近或远离对象来改变力传递比,从而使用最有效的结构来抓握各种类型的对象。
图3和图4是第三驱动电机510和第四驱动电机520的长度彼此不同的状态的侧视图。
图3示出第三驱动电机510的连接构件512比第四驱动电机520的连接构件522长并且因此铰链300向上移动的示例。相反,图4示出第三驱动电机510的连接构件512比第四驱动电机520的连接构件522短并且因此铰链300向下移动的示例。
具体地,由于第三驱动电机510和第四驱动电机520的长度不同,因此表示由第一指状件10和第二指状件20执行抓握的高度的抓握线G可位于抓握装置1的中心线C的上方或下方。
抓握线G是与铰链300的高度相应的水平线,并且可表示将由抓握装置1抓握对象的点。在抓握装置1具有垂直对称形状的情况下,中心线C也可以是作为对称的基准的水平线。
例如,当待抓握的对象放置在诸如架子的高处时,第三驱动电机510的连接构件512可操作为比第四驱动电机520的连接构件522长。因此,抓握装置1的抓握线G比中心线C高,因此第一指状件10和第二指状件20可在不妨碍架子的情况下容易地抓握高处的对象。
相反,当待抓握对象放置在诸如地板或桌子的低处时,第三驱动电机510的连接构件512可操作为比第四驱动电机520的连接构件522短。因此,抓握装置1的抓握线G比中心线C低,因此第一指状件10和第二指状件20可在例如不妨碍地板或桌子的情况下容易地抓握低处的对象。
也就是说,根据本公开的实施例的抓握装置1可移动,使得第三驱动电机510的连接构件512和第四驱动电机520的连接构件522的长度彼此相等,因此,铰链300可移动到与待抓握的对象的形状相应的位置,并且即使用较小的力也可容易地抓握对象。
此外,根据本公开的实施例的抓握装置1可移动,使得第三驱动电机510的连接构件512和第四驱动电机520的连接构件522的长度彼此不同,因此,铰链300可形成与抓握装置1的中心线C不同的抓握线G,并且可在不妨碍支撑物(诸如,架子、地板或桌子)的情况下容易地抓握对象。
图5是第一链接部分和第二链接部分中的每一个被构造为单个连杆的抓握装置的侧视图。
参照图5,在抓握装置1a中,被构造为分别支撑第一指状件10和第二指状件20的第一链接部分100和第二链接部分200可各自被构造为单个连杆。第一链接部分100和第二链接部分200可布置为彼此相交并通过铰链300彼此连接。例如,第一链接部分100和第二链接部分200可具有大致剪刀的形状。
第一引导槽101和第二引导槽201可在纵向方向上分别形成在第一链接部分100和第二链接部分200中。铰链300可在第一引导槽101和第二引导槽201内移动。
第一致动器400可配置有两个驱动电机,但驱动电机的数量不限于两个,并且第一致动器400可配置有一个驱动电机并连接到第一链接部分100或第二链接部分200的后端。
第二致动器500可配置有一个驱动电机并移动铰链300。第二致动器500可布置在支撑件600上,以向前或向后移动铰链300。然而,第二致动器500的布置不限于此,并且可以以与图1所示类似的方式由第一链接部分100或第二链接部分200支撑。
即使当第一链接部分100和第二链接部分200a均被构造为单个连杆时,铰链300也可移动到预设位置以与对象的形状相应。具体地,当需要大的抓握力和指状件之间的窄间隙来抓握诸如盘子的对象时,铰链300可通过第二致动器500向前移动以靠近对象。当需要小的抓握力和指状件之间的宽间隙来抓握诸如杯子的对象时,铰链300可通过第二致动器500向后移动以远离对象。
因此,即使当第一致动器400以相同的驱动力操作时,抓握装置1也可以以适合于对象的形状的力传递比有效地抓握对象。
图6是根据本公开的实施例的机器人装置的框图。
参照图6,根据本公开的实施例的机器人装置1000可包括抓握装置1、处理器700、图像传感器810、压力传感器820、距离传感器830和存储器900。
抓握装置1可包括第一指状件10、第二指状件20以及链接部分100和链接部分200。链接部分100和链接部分200可相对于铰链300彼此相交布置,并且可支撑第一指状件10和第二指状件20。抓握装置1可通过改变铰链300在链接部分100和链接部分200上的位置来调节链接部分100和链接部分200的支撑点。
具体地,链接部分100和链接部分200可包括相对于铰链300彼此相交布置的第一链接部分100和第二链接部分200。第一链接部分100可设置有第一引导槽101和第一引导槽121,并且可支撑第一指状件10。第二链接部分200可设置有与第一链接部分100相交布置的第二引导槽201和第二引导槽221,并且可支撑第二指状件20。
铰链300可在第一引导槽101和第一引导槽121以及第二引导槽201和第二引导槽221内移动,并且可在第一链接部分100和第二链接部分200的相交处连接第一链接部分100和第二链接部分200。
抓握装置1还可包括致动器500,其中,致动器500被构造为在第一引导槽121和第二引导槽221内移动铰链300。致动器500可包括连接到铰链300并且各自具有可变长度的连接构件501、连接构件512和连接构件522。
抓握装置1的链接部分100和链接部分200可各自实施为如图1所示的四杆连杆装置,但不限于此,并且可各自实施为如图5所示的单个连杆。这里可简单描述抓握装置1的组件中的与上述示例相同的部分,或者可省略其详细描述。
处理器700可控制机器人装置1000的整体操作。为此,处理器700可包括中央处理器(CPU)或应用处理器(AP)。处理器700可被实现为至少一个通用处理器、数字信号处理器、专用集成电路(ASIC)、片上系统(SoC)、微计算机(MICOM)、驱动器IC等。
图像传感器810可检测对象的形状或位置中的至少一个。具体地,图像传感器810可被配置为拍摄机器人装置1000周围的对象,并且可以是相机。例如,图像传感器810可被实现为三维(3D)相机或深度相机。
图像传感器810可被布置在机器人装置1000的身体部分或头部上,但不一定限于此,并且可被布置在抓握装置1上的各种位置上,诸如第一链接部分100、第二链接部分200、第一指状件10和第二指状件20上。
压力传感器820可测量施加到第一指状件10和第二指状件20中的至少一个的压力。例如,压力传感器820可包括压电元件或测压元件,将施加到第一指状件10和第二指状件20中的至少一个的压力转换成电信号,并将电信号发送到处理器700。
压力传感器820可布置在彼此面对的第一指状件10的表面和第二指状件20的表面上。可设置两个压力传感器820,并将其布置在第一指状件10和第二指状件20两者上,或者可设置一个压力传感器820,并将其布置在第一指状件10或第二指状件20上。
当抓握装置1抓握对象时,压力传感器820可检测对象施加到第一指状件10和第二指状件20的压力,将压力转换为电信号,并且将电信号发送到处理器700。
距离传感器830可检测距对象的距离。具体地,距离传感器830可被实现为包括发光部件和光接收部件的飞行时间(ToF)传感器,并且基于从发光部件发射、从对象反射并由光接收部件接收的光所需的时间来检测距离传感器830与对象之间的距离。
例如,距离传感器830可被实现为红外传感器,其中,红外传感器基于在发射红外线之后将从对象反射并接收的红外线所需的时间来检测距对象的距离。然而,距离传感器830的类型不必限于此,并且可被实现为能够检测距对象的距离的各种类型的传感器,诸如,超声传感器或光波检测和测距(LiDAR)传感器。另外,ToF传感器仅是示例,并且本公开的实施方式的传感器的类型不受限制,只要其能够检测距对象的距离即可。
下面将参照图7a至图7f详细描述使用距离传感器830的机器人装置1000的控制处理。
存储器900可将用于控制机器人装置1000的组件的整体操作的操作系统(OS)以及与所述组件相关的指令或数据存储在存储器900中。
因此,处理器700可通过使用存储在存储器900中的各种指令或数据来控制机器人装置1000的多个硬件或软件组件,通过将从至少一个其他组件接收的命令或数据加载到易失性存储器中对从至少一个其他组件接收的命令或数据进行处理,并且将各种类型的数据存储在非易失性存储器中。
具体地,存储器900可存储关于以下项的信息:各种对象的形状、因待抓握的对象而施加到第一指状件10和第二指状件20的临界压力值、以及由距离传感器830在抓握装置1所在的每一个点处检测到的距离的总和。
处理器700可接收并分析关于由图像传感器810检测到的对象的形状和位置的信息,以识别对象的位置、大小、形状和类型。具体地,处理器700可通过对象识别算法来识别对象,以识别对象的大小、形状、类型等,并且基于对象的深度信息来识别对象的位置。
在下文中,将详细描述根据本公开的实施例的使用图像传感器810的机器人装置1000的控制处理。
图像传感器810可检测待抓握的对象的位置和形状,并且将关于检测到的位置和形状的信息发送到处理器700。处理器700将从图像传感器810接收的信息与存储在存储器900中的关于各种对象的形状的信息进行比较,以识别对象的类型和位置。
此后,处理器700可控制抓握装置1将铰链300定位成与由图像传感器810检测到的对象相应。具体地,处理器700可根据由图像传感器810检测到的对象的形状或位置中的至少一个来确定连接构件501、连接构件512和连接构件522的长度,并且控制致动器500使得连接构件501、连接构件512和连接构件522具有确定的长度。
例如,当处理器700识别出待抓握的对象具有与盘子的形状类似的扁平形状时,处理器700可控制致动器500增加连接构件501、连接构件512和连接构件522的长度。因此,参照图1,铰链300移动靠近对象,因此抓握装置1可在减小第一指状件10与第二指状件20之间的间隙L2的同时以高的力传递比容易地抓握甚至扁平的对象。
当处理器700将待抓握的对象识别为诸如杯子的高的对象时,处理器700可控制致动器500减小连接构件501、连接构件512和连接构件522的长度。因此,参照图2,铰链300移动远离对象,因此抓握装置1可在增加第一指状件10与第二指状件20之间的间隙L2的同时以低的力传递比容易地抓握甚至高的对象。
也就是说,即使在使用相同的驱动源时,根据本公开实施例的机器人装置1000也能够通过图像传感器810和处理器700的控制处理移动用作支撑点的铰链300靠近或远离对象。因此,机器人装置1000通过根据对象的形状改变第一指状件10与第二指状件20之间的间隙L2以及力传递比,能够有效地抓握各种形状的对象。
当处理器700识别出待抓握的对象位于抓握装置1的中心线C的上方或下方时,处理器700可控制致动器500,使得第三驱动电机510的连接构件512和第四驱动电机520的连接构件522的长度彼此不同。
具体地,如图3所示,当对象位于抓握装置1的中心线C上方时,处理器700可控制致动器500,使得第三驱动电机510的连接构件512比第四驱动电机520的连接构件522长。
相反,如图4所示,当对象位于抓握装置1的中心线C下方时,处理器700可控制致动器500,使得第三驱动电机510的连接构件512比第四驱动电机520的连接构件522短。
因此,抓握装置1相对于高度与中心线C不同的抓握线G,能够在不妨碍支撑物(诸如,架子、地板、桌子)的情况下容易地在宽范围内执行抓握操作。
在下文中,将详细描述根据本公开的实施例的使用压力传感器820的机器人装置1000的控制处理。
当待抓握的对象位于第一指状件10与第二指状件20之间的情况下,抓握装置1也可通过第一致动器400执行抓握动作。在该处理中,压力可由对象被施加到第一指状件10和第二指状件20,并且压力传感器820可测量压力值。
处理器700也可基于由压力传感器820测量出的压力值来控制抓握装置1的抓握操作。具体地,处理器700可将由压力传感器820测量的压力值与存储在存储器900中的临界压力值进行比较,并且当测量的压力值达到临界压力值时,控制第一致动器400的操作停止。
因此,根据本公开的实施例的机器人装置1000可防止对象由于过高的压力而破损或者由于过低的压力而从抓握装置1滑落,并且可用适当的抓握力稳定地抓握对象。
下面将参照图7a至图7f详细描述根据距离传感器830的检测结果来控制抓握装置1的操作的处理。图7a至图7f是用于描述根据距离传感器830的测量值控制抓握装置1的抓握操作的处理的示图。
参照图7a至图7f,距离传感器830还可包括第一指状件10上的第一距离传感器831和第二指状件20上的第二距离传感器832。
当第一距离传感器831在机器人装置1000移动期间检测到对象S时,处理器700可激活第二距离传感器832,接收由第一距离传感器831和第二距离传感器832根据机器人装置1000的移动在多个点处检测到的距对象S的距离有关的信息,并且基于接收到的信息控制抓握装置1的抓握操作。
具体地,如图7a所示,在机器人装置1000朝向待抓握的对象S移动期间,处于激活状态的第一距离传感器831可检测对象S,并且第二距离传感器832可处于去激活状态直到第一距离传感器831检测到对象S。
因此,根据本公开实施例的机器人装置1000可消除当第一指状件10和第二指状件20之间没有对象时可能发生的光学干涉效应,并且可通过仅激活第一距离传感器831来使功耗最小化并防止处理器700上的负载。
此后,如图7b所示,当第一距离传感器831检测到对象时,处理器160可激活第二距离传感器832。因此,处理器700可从第一距离传感器831和第二距离传感器832接收关于距待抓握的对象S的距离的信息。
另外,处理器700可确定第一距离传感器831和对象S之间的距离与第二距离传感器832和对象S之间的距离之间的差值是否大于阈值。具体地,当确定差值大于阈值时,处理器700可控制第一指状件10和第二指状件20中的至少一个,使得差值等于或小于阈值。
例如,当阈值被设置为0时,处理器700可控制第一指状件10和第二指状件20中的至少一个,使得第一距离传感器831与对象S之间的距离等于第二距离传感器832与对象S之间的距离。
因此,在抓握装置1抓握对象S时,第一指状件10和第二指状件20可同时以相同的速度接近对象S以稳定地抓握对象S。
此后,如图7c、图7d和图7e所示,机器人装置1000可在朝向对象S的方向上连续移动,处理器700可在机器人装置1000移动期间从第一距离传感器831和第二距离传感器832顺序地接收关于距对象S的距离的信息。
在这种情况下,处理器700可基于从第一距离传感器831和第二距离传感器832接收的关于距离的信息来确定距对象S的距离最小的点。当从第一距离传感器831和第二距离传感器832接收的多个点处的距离值顺序地减小时,处理器700可沿朝向对象S的方向连续移动机器人装置1000。
当从第一距离传感器831和第二距离传感器832接收的距离值顺序地减小但在某点处增大时,处理器700可将紧接在该点之前的点确定为距对象S的距离最小的点,并且控制机器人装置1000返回到距对象S的距离最小的点。
如图7f所示,当抓握装置1位于第一距离传感器831与对象S之间的距离以及第二距离传感器832与对象S之间的距离最小的点时,处理器700可控制第一致动器400使抓握装置1抓握对象S。当第一致动器400的两个驱动电机之间的间隙L1和第一指状件10与第二指状件20之间的间隙L2被控制为小时,抓握装置1可抓握对象S。
以这种方式,本公开的机器人装置1000可通过在第一距离传感器831与对象S之间的距离最小的点处或者在第二距离传感器832与对象S之间的距离最小的点处抓握对象S来抓握对象S的中心部分或最厚部分。因此,本公开的机器人装置1000能够稳固地抓握对象S,并且可防止在抓握对象S的边缘时对象S掉落或破损。
尽管本文已经示出和描述了本公开的示例实施例,但应当理解的是,本公开不限于此,并且本领域普通技术人员可在不脱离所附权利要求中限定的本公开的主旨的情况下进行各种修改,并且这些修改落入权利要求中限定的范围内。
- 抓握增强支撑装置
- 半导体装置以及包括该半导体装置的显示装置
- 用于集成电路板的定位装置和用于包括这种定位装置的集成电路板的检测装置
- 机器人抓握器、联动装置及用于机器人抓握的方法
- 抓握装置、抓握判定方法和抓握判定程序