纤维绳索预牵伸装置、预牵伸方法
文献发布时间:2023-06-19 10:38:35
技术领域
本申请属于纤维绳索技术领域,具体涉及纤维绳索预牵伸装置、预牵伸方法。
背景技术
绳索在加载负荷后会发生伸长,断裂伸长率是继断裂强力和线密度后,绳索的另一个最重要性能指标。新制成的编织或捻制纤维绳索由于其致密结构,在施加负荷时往往有很大的伸长率,而且其中有一部分伸长是不可回复的,这部分不可回复伸长实际上是绳索的结构伸长。对于绳索尺寸稳定性要求较高的绳索产品,例如吊装绳、电力牵引绳、帆船绳、深海浮标系泊缆绳、浮式生产储油卸油装置(FPSO)单点和多点系泊缆绳等,需要在生产过程中消除绳索的结构伸长。
消除绳索的结构伸长最好的手段,是对绳索进行循环预牵伸工艺处理,即施加一定的拉力对绳索进行拉伸~松弛~再拉伸~再松弛的循环预牵伸。现在对绳索进行循环预牵伸工艺处理一般在卧式拉力机上进行,对于长度较大的绳索产品,例如深海浮标系泊缆绳长度为500米或更长,只能在跨度更大的场地上用车辆对绳索施加拉力进行预拉伸,这种预牵伸方式存在着操作复杂、牵伸力难以准确控制、预牵伸过程中绳索易磨毛和沾污的问题,而且拉伸中存在安全隐患。
发明内容
有鉴于此,本申请实施例公开的技术方案是,提供一种纤维绳索预牵伸装置,以消除纤维绳索结构伸长,使纤维绳索获得理想的机械性能指标。
一些实施例公开的纤维绳索预牵伸装置,包括:
装置平台;
第一牵伸组件,设置安装在装置平台上,第一牵伸组件包括至少一个用于牵伸纤维绳索的第一转动部件;
可移动组件,设置在装置平台上,设置为在装置平台上可移动;
第二牵伸组件,设置安装在可移动组件上,第二牵伸组件包括至少一个用于牵伸纤维绳索的第二转动部件,第二转动部件与第一转动部件平行设置,二者之间的距离设置为可调节;
驱动组件,设置与第二转动部件连接,用于驱动第二转动部件的移动,调节与第一转动部件之间的距离;
张力检测组件,设置用于检测施加于纤维绳索的张力;
其中,纤维绳索设置在第一转动部件和第二转动部件上,通过调节第一转动部件与第二转动部件之间的距离以调节纤维绳索的张力。
进一步,一些实施例公开的纤维绳索预牵伸装置,第一牵伸组件还包括:
第一变速箱,设置与第一转动部件连接,用于为第一转动部件传递动力;
第一电机,设置与第一变速箱连接,用于驱动第一转动部件转动。
一些实施例公开的纤维绳索预牵伸装置,第二牵伸组件还包括:
第二变速箱,设置与第二转动部件连接,用于为第二转动部件传递动力;
第二电机,设置与第二变速箱连接,用于驱动第二转动部件转动。
一些实施例公开的纤维绳索预牵伸装置,第一转动部件的表面上设置有第一连续凹槽。
一些实施例公开的纤维绳索预牵伸装置,第二转动部件的表面上设置有第二连续凹槽。
一些实施例公开的纤维绳索预牵伸装置,第一连续凹槽表面设置为橡胶材料。
一些实施例公开的纤维绳索预牵伸装置,第二连续凹槽表面设置为橡胶材料。
一些实施例公开的纤维绳索预牵伸装置,第一转动部件的直径与纤维绳索的直径之比为30~40:1。
一些实施例公开的纤维绳索预牵伸装置,第二转动部件的直径与纤维绳索的直径之比为30~40:1。
另一方面,一些实施例公开了一种纤维绳索预牵伸方法,纤维绳索预牵伸装置依据此方法对纤维绳索进行预牵伸过程,该方法具体包括:
(1)设置纤维绳索依次缠绕在第一转动部件、第二转动部件上;
(2)设定纤维绳索的牵伸拉力;
(3)启动第一转动部件、第二转动部件,使纤维绳索处于拉紧状态,并保持移动;
(4)检测纤维绳索的张力,并根据检测到的张力,通过驱动组件调节第一转动部件与第二转动部件之间的距离使纤维绳索获得与设定的牵伸拉力相当的张力,实现对纤维绳索的连续预牵伸。
本申请实施例公开的纤维绳索预牵伸装置,通过调整第一转动部件与第二转动部件之间的距离,实现对纤维绳索的张力控制,进而实现在设定拉伸力作用下的预牵伸,同时通过第一转动部件与第二转动部件的转动带动纤维绳索连续移动,使得纤维绳索在移动中获得连续预牵伸,能够实现对任意长度纤维绳索的预牵伸,而且能够精确设定并控制预牵伸拉力,在纤维绳索预牵伸处理中具有良好的实用价值,在纤维绳索制造领域具有广阔的应用前景。
附图说明
图1实施例1纤维绳索预牵伸装置组成示意图
图2实施例2第一转动部件与第二转动部件设置示意图
图3实施例3纤维绳索预牵伸装置组成示意图
附图标记
1 第一牵伸组件 2 第二牵伸组件
3 可移动组件 4 驱动组件
5 张力检测组件 6 第一储绳筐
7 第二储绳筐 8 控制组件
11 第一转动部件 12 第一变速箱
13 第一电机 21 第二转动部件
22 第二变速箱 23 第二电机
31 滑动平台 32 滑轨
33 移动平台 34 滚动轮
111 第一转动轴 112 第一导辊
113 第一连续凹槽 211 第二转动轴
212 第二导辊 213 第二连续凹槽
100 装置平台 101 纤维绳索
102 滚动轨道 R
R
具体实施方式
在这里专用的词“实施例”,作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。本申请实施例中性能指标测试,除非特别说明,采用本领域常规试验方法。应理解,本申请中所述的术语仅仅是为描述特别的实施方式,并非用于限制本申请公开的内容。
除非另有说明,否则本文使用的技术和科学术语具有本申请所属技术领域的普通技术人员通常理解的相同含义;作为本申请中其它未特别注明的试验方法和技术手段均指本领域内普通技术人员通常采用的实验方法和技术手段。
本文所用的术语“基本”和“大约”用于描述小的波动。例如,它们可以是指小于或等于±5%,如小于或等于±2%,如小于或等于±1%,如小于或等于±0.5%,如小于或等于±0.2%,如小于或等于±0.1%,如小于或等于±0.05%。在本文中以范围格式表示或呈现的数值数据,仅为方便和简要起见使用,因此应灵活解释为不仅包括作为该范围的界限明确列举的数值,还包括该范围内包含的所有独立的数值或子范围。例如,“1~5%”的数值范围应被解释为不仅包括1%至5%的明确列举的值,还包括在所示范围内的独立值和子范围。因此,在这一数值范围中包括独立值,如2%、3.5%和4%,和子范围,如1%~3%、2%~4%和3%~5%等。这一原理同样适用于仅列举一个数值的范围。此外,无论该范围的宽度或所述特征如何,这样的解释都适用。
在本文中,包括权利要求书中,所有连接词,如“包含”、“包括”、“带有”、“具有”、“含有”、“涉及”、“容纳”等被理解为是开放性的,即是指“包括但不限于”。只有连接词“由……构成”和“由……组成”是封闭连接词。
为了更好的说明本申请内容,在下文的具体实施例中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本申请同样可以实施。在实施例中,对于本领域技术人员熟知的一些方法、手段、仪器、设备等未作详细描述,以便凸显本申请的主旨。本文公开的纤维绳索预牵伸装置可以对多种结构、多种材料的纤维绳索实现预牵伸,例如3股捻绳、4股捻绳、8股编绳、12股编绳、双编绳和带涂层的绳索;涤纶、锦纶、聚丙烯、聚乙烯和维纶等为代表的一种或多种通用合成纤维绳索,以及以芳族聚酰胺纤维绳索,聚芳酯纤维绳索,超高分子量聚乙烯纤维和PBO纤维等为代表的高性能纤维材料绳索等。
在不冲突的前提下,本申请实施例公开的技术特征可以任意组合,得到的技术方案属于本申请实施例公开的内容。
在一些实施方式中,纤维绳索预牵伸装置包括:
装置平台;装置平台通常是纤维绳索预牵伸装置的基础,通常具有设置各组成组件和各部件的合理结构和平面区域,以便合理布置各组件以使其相互协调适配,例如装置平台具有足够的强度以支撑装置的重量,具有合理的平面以固定各组件,合理的结构设置组件之间的连接部件和结构;
第一牵伸组件,设置安装在装置平台上,第一牵伸组件包括至少一个用于牵伸纤维绳索的第一转动部件;通常第一牵伸组件作为绳索预牵伸的重要部件之一,设置固定在装置平台的合理位置上,以便将纤维绳索设置在其合理部位上,例如通过固定或者缠绕的方式将绳索设置在第一转动部件上以便向纤维绳索施加合理的拉力,第一转动部件为能够围绕其转动轴作转动运动的部件,设置在第一转动部件上的纤维绳索与其同步移动,同时实现纤维绳索的连续移动,以便对连续移动的纤维绳索进行预牵伸处理;
可移动组件,设置在装置平台上,设置为在装置平台上可移动;通常可移动组件设置在装置平台的合理部位上,能够在设定的区域移动,例如滑动、滚动等,而且装置平台上通常设置有与可移动组件相互适配的结构,以实现可移动组件的移动,例如,供其滑动的滑轨,便于定向滚动的轨道等;
第二牵伸组件,设置安装在可移动组件上,第二牵伸组件包括至少一个用于牵伸纤维绳索的第二转动部件,第二转动部件与第一转动部件平行设置,二者之间的距离设置为可调节,通常第二转动部件的转动轴与第一转动部件的转动轴位于同一平面内;第二牵伸组件也是设置牵伸纤维绳索的重要部件之一,通常纤维绳索也需要设置固定在第二牵伸组件的合理部位上,例如通过固定或者缠绕的方式将绳索设置在第二转动部件上,使纤维绳索获得施加的拉力,第二转动部件为能够围绕其转动轴作转动运动的部件,设置在第二转动部件上的纤维绳索与其同步移动,同时实现纤维绳索的连续移动,以便对连续移动的纤维绳索进行预牵伸处理;通常纤维绳索同时设置在第一转动部件和第二转动部件上以后,以合理的方式分别与两个转动部件连接,使纤维绳索在两个转动部件之间处于拉伸状态,进一步可以通过调节第一转动部件和第二转动部件之间的距离,调节纤维绳索的拉伸程度,以对其施加设定的拉伸力,该拉伸力与纤维绳索的张力相当,纤维绳索的张力可以通过张力检测组件进行实时监测;通常第一转动部件与第二转动部件平行设置,则其转动轴相互平行,以便在其转动过程中保持恒定距离;
驱动组件,设置与第二转动部件连接,用于驱动第二转动部件的移动,调节与第一转动部件之间的距离;驱动组件通常能够提供一定的拉力或压力,以便推动第二转动部件实现其位置在装置平台上的移动,以调节与第一转动部件之间的距离;通常第二牵伸组件固定安装在可移动组件上,与其位置固定,驱动组件直接驱动第二转动部件,可以使其与第二牵伸组件、可移动组件同步移动,实现第二转动部件的移动,且驱动组件与第二转动部件直接连接有利于实现对其移动距离更为精确的控制;作为驱动组件,可以选择液压驱动组件;
张力检测组件,设置用于检测施加于纤维绳索的张力;例如可以设置绳索张力仪,检测纤维绳索的张力;绳索张力仪的型号可以根据牵伸绳索的拉力等进行确定,也可以根据预牵伸装置的作业需求进行设计定制,以便与其结构相互适配安装;作为可选,可以选择扭力传感器,设置在第二转动部件的转动轴上;可以选择拉力传感器,设置在第一转动部件的转动轴和第二转动部件的转动轴上;
其中,纤维绳索设置在第一转动部件和第二转动部件上,通过调节第一转动部件与第二转动部件之间的距离调节纤维绳索的张力,纤维绳索位于第一转动部件之外的部分处于自由状态,即不施加外力使其与第一转动部件之间不存在额外张力,纤维绳索位于第二转动部件之外的部分也处于自由状态,即不施加外力使其与第二牵伸组件之间不存在额外张力,确保纤维绳索仅仅受到第一转动部件与第二转动部件的拉力而获得预牵伸,使该预牵伸过程控制准确。处于自由状态的纤维绳索有利于被牵伸之后可恢复形变的恢复。
作为可选实施方式,第一牵伸组件还包括:第一变速箱,设置与第一转动部件连接,用于为第一转动部件传递动力;第一电机,设置与第一变速箱连接,用于驱动第一转动部件转动。通常第一转动部件为圆柱体形,设置为沿其中心轴转动,在其转动的过程中,实现纤维绳索的移动,即可对整个纤维绳索进行连续拉伸。第一电机与第一变速箱相互配合,为第一转动部件的转动提供动力。通常为了纤维绳索设置在第一转动部件上实现对纤维绳索的牵伸,可以将纤维绳索缠绕在其外侧表面上,通过纤维绳索与外表面之间的摩擦力固定二者的相对位置,使得纤维绳索能够随着第一转动部件的转动而移动。为了使纤维绳索的位置更为稳定可靠,可以将纤维绳索在第一转动部件的外表面连续缠绕多次,仅通过多次缠绕将纤维绳索固定在第一转动部件表面,使纤维绳索在其转动过程中与其同步移动,例如2次、3次、4次、5次、6次、7次、8次等,以合适的缠绕强度和缠绕效率为目的,结合纤维绳索的直径、材质、第一转动部件的表面摩擦力等选择缠绕的次数;通常较为优选的缠绕次数是5-7次。缠绕一次通常是指纤维绳索在第一转动部件上缠绕一周。
作为可选实施方式,第一转动部件包括第一导辊,第一导辊上设置有转动轴,第一导辊以该转动轴为轴心转动。
作为可选实施方式,第一转动部件的表面上设置有第一连续凹槽。通常第一连续凹槽设置在第一转动部件的外表面上,呈螺旋状,形成螺旋状连续凹槽,可以将纤维绳索设置在该连续凹槽中,更好地稳定纤维绳索在转动部件表面的位置,增大纤维绳索与第一转动部件表面的接触面积,增大纤维绳索与第一转动部件之间的摩擦力,确保绳索获得合适的拉力。
作为可选实施方式,第一转动部件表面设置为橡胶材料,以增强其表面对纤维绳索的摩擦力。例如选择表面材料为橡胶材质的导辊作为第一转动部件,或者在第一转动部件的表面设置橡胶外套,或者在第一连续凹槽中设置橡胶垫,使其形状与连续凹槽紧密适配。
作为可选实施方式橡胶材料可以是乙丙橡胶、丁晴橡胶、丁苯橡胶或硅橡胶,较为优选的是三元乙丙橡胶。
进一步,作为可选实施方式,橡胶材料的硬度可以设定在邵氏硬度65~85度之间;较为优选的实施方式,是邵氏硬度75度。
作为可选实施方式,第一转动部件的直径与纤维绳索的直径之比为30~40:1。第一转动部件的直径是影响纤维绳索预牵伸效果的重要因素之一,若其直径太小,纤维绳索在预牵伸过程中容易产生弯曲疲劳,对其大分子结构造成一定程度的破坏,会损害经过预牵伸处理的纤维绳索的使用寿命,通常第一转动部件的直径设定与纤维绳索的直径有直接关系,二者直径在一定的范围之内即可避免弯曲疲劳,例如第一转动部件的直径与纤维绳索的直径之比大于20:1,例如30~40:1为可选的实施方式。
作为可选实施方式,纤维绳索预牵伸装置的第二牵伸组件包括:第二变速箱,设置与第二转动部件连接,用于为第二转动部件传递动力;第二电机,设置与第二变速箱连接,用于驱动第二转动部件转动。通常第二转动部件为圆柱体形,设置为沿其中心轴转动,在其转动的过程中,实现纤维绳索的移动,即可对整个纤维绳索进行连续拉伸。第二电机与第二变速箱相互适配协调,为第二转动部件的转动提供驱动力。通常为了将纤维绳索设置在第二转动部件上实现牵伸,可以将纤维绳索缠绕在其外侧表面上,通过纤维绳索与外表面之间的摩擦力固定二者的相对位置,使得纤维绳索能够随着第二转动部件的转动而移动前行。为了使纤维绳索的位置更为稳定可靠,可以将纤维绳索在第二转动部件的外表面连续缠绕多次,仅通过多次缠绕将纤维绳索固定在第二转动部件表面,使纤维绳索在其转动过程中与其同步移动,例如2次、3次、4次、5次、6次、7次、8次等,以合适的缠绕强度和缠绕效率为目的,结合纤维绳索的直径、材质、第二转动部件的表面摩擦力等选择缠绕的次数;通常较为优选的缠绕次数是5-7次。缠绕一次通常是指纤维绳索在第二转动部件上缠绕一周。
作为可选实施方式,第二转动部件包括第二导辊,第二导辊上设置有转动轴,第二导辊以该转动轴为轴心转动。
作为可选实施方式,第二转动部件的表面上设置有第二连续凹槽。通常第二连续凹槽设置在第二转动部件的外表面上,呈螺旋状,形成螺旋状连续凹槽,可以将纤维绳索设置在该连续凹槽中,更好地稳定纤维绳索在第二转动部件表面的位置,增大纤维绳索与第二转动部件表面的接触面积,增大纤维绳索与第二转动部件之间的摩擦力,确保绳索获得合适的拉力。
作为可选实施方式,第二转动部件表面设置为橡胶材料,以增强其表面对纤维绳索的摩擦力。例如选择表面材料为橡胶材质的导辊作为第二转动部件,或者在第二转动部件的表面设置橡胶外套,或者在第二连续凹槽中设置橡胶垫,使其形状与连续凹槽紧密适配。作为可选实施方式橡胶材料可以是乙丙橡胶、丁晴橡胶、丁苯橡胶或硅橡胶,较为优选的是三元乙丙橡胶。进一步,作为可选实施方式,橡胶材料的硬度可以设定在邵氏硬度65~85度之间;较为优选的实施方式,是邵氏硬度75度。
作为可选实施方式,第二转动部件的直径与纤维绳索的直径之比为30~40:1。第二转动部件的直径是影响纤维绳索预牵伸效果的重要因素之一,若其直径太小,纤维绳索在预牵伸过程中容易产生弯曲疲劳,对其大分子结构造成一定程度的破坏,会损害经过预牵伸处理的纤维绳索的使用寿命,通常第二转动部件的直径设定与纤维绳索的直径有直接关系,二者直径在一定的范围之内即可避免弯曲疲劳,例如第二转动部件的直径与纤维绳索的直径之比为大于20:1,例如30~40:1为可选的实施方式。
作为可选实施方式,液压驱动组件包括:液压柱塞,与第二牵伸组件固连,用于带动其移动;液压缸,用于安装液压柱塞,液压柱塞与液压缸相互密封适配,以使液压柱塞在液压缸中移动;液压泵,用于向液压缸中提供压力液体,提供液压动力;电机,设置与所述液压泵连接,用于驱动所述液压泵作业;贮液罐,设置与所述液压泵连通,用于储存压力液体。作为较为优选实施方式,液压柱塞与第二牵伸组件的第二转动部件转动轴设置在同一平面内,且二者相互垂直。进一步,作为较为优选实施方式,液压柱塞与第二转动部件转动轴、第一转动部件转动轴设置在同一平面内,第一转动部件转动轴与第二转动部件转动轴相互平行设置,液压柱塞则垂直于第一转动部件转动轴和第二转动部件转动轴。
作为可选实施方式,第一牵伸组件与第二牵伸组件设置为相同,以便实现对二者同步转动的更好控制。第一牵伸组件与第二牵伸组件相同,通常是指其组成部件分别对应相同,例如第一转动部件与第二转动部件相同,以便实现相同的设置,获得相同的牵伸力,并便于同步控制。纤维绳索随第一转动部件、第二转动部件移动的过程中,保持相同的速度,使纤维绳索受到适当的拉力处于伸展状态,但不足以进行预牵伸。通常第一转动部件与第二转动部件相同包括结构、形状、材质相同。
作为可选实施方式,第一转动部件的转动方向与第二转动部件的转动方向可以相同,也可以相反,通常该转动方向与纤维绳索在第一转动部件或第二转动部件上的缠绕方式相关联进行调整,以确保纤维绳索获得符合预牵伸需要的移动方式。
通常纤维绳索预牵伸装置还包括用于控制第一牵伸组件、第二牵伸组件、驱动组件、张力检测组件的控制组件,例如变频电气控制器、信息处理器等。例如变频电气控制器,可以控制第一转动部件和第二转动部件的转动状态,并根据张力检测组件获得的张力信息,控制驱动组件调整第一转动部件与第二转动部件之间的距离,实现对纤维绳索张力的控制,以使其获得设定的拉伸力,实现纤维绳索预牵伸。通常张力检测组件实时监测纤维绳索的张力,控制组件根据实时张力实时动态调整第一转动部件与第二转动部件之间距离,以使纤维绳索获得的拉伸力维持在设定的拉力范围之内。第一转动部件与第二转动部件保持同步转动状态,纤维绳索保持均匀移动,实现了对纤维绳索的连续预牵伸,如此可以对任意长度的纤维绳索进行预牵伸。
另一方面,一些实施例公开了一种纤维绳索预牵伸方法,纤维绳索预牵伸装置依据此方法对纤维绳索进行预牵伸过程,该方法具体包括:
(1)设置纤维绳索依次缠绕在第一转动部件、第二转动部件上;通常将纤维绳索在第一转动部件上缠绕多次,然后进一步将纤维绳索在第二转动部件上缠绕多次,使纤维绳索获得足够的与转动部件表面之间的摩擦力,在第一转动部件与第二转动部件同步转动过程中,使纤维绳索获得匀速的移动,保持稳定状态;同步转动通常是指同时转动并且具有相同的线速度;缠绕在第一转动部件和第二转动部件上的纤维绳索,其位于两者之外侧的部分处于自由状态,即,第一转动部件外侧的纤维绳索不受到改变其张力的外力,第二转动部件外侧的纤维绳索也不受到改变其张力的外力;
(2)设定纤维绳索的牵伸拉力;设定纤维绳索的预牵伸拉力,以便控制组件进一步根据实际测得的纤维绳索张力,指令驱动组件对第二转动部件的移动控制;
(3)启动第一转动部件、第二转动部件,使纤维绳索处于拉紧状态,并保持移动;启动第一转动部件、第二转动部件使其同步转动,纤维绳索获得匀速移动的动力,位于第一转动部件与第二转动部件之间的纤维绳索保持匀速直线运动状态;
(4)检测纤维绳索的张力,并根据检测到的张力,通过驱动组件调节第一转动部件与第二转动部件之间的距离使纤维绳索获得与设定的牵伸拉力相当的张力,实现对纤维绳索的预牵伸。
以上预牵伸过程连续进行,直至完成对整个纤维绳索的一次预牵伸,若需要进行多次预牵伸,可以重复以上过程多次。
以下结合实施例对技术细节做进一步说明。
实施例1
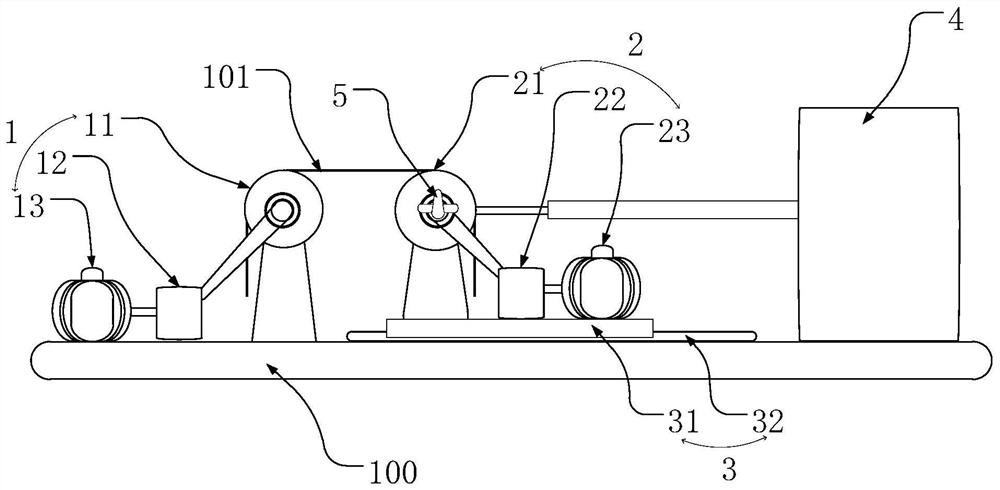
图1为实施例1公开的纤维绳索预牵伸装置组成示意图。
实施例1中,装置平台100水平设置,包括水平设置的平面以便设置其它组件,其中,第一牵伸组件1设置在装置平台100的左侧平面上,在第一牵伸组件1的右侧设置有第二牵伸组件2,第二牵伸组件2设置安装在可移动组件3上,可移动组件3设置在装置平台100上,并可在装置平台100上自由移动;在第二牵伸组件2的右侧方,设置有驱动组件4,张力检测组件5为扭力传感器,适配设置在第二转动部件的转动轴上,以检测纤维绳索受到的张力;
其中,第一牵伸组件1包括第一转动部件11,通过基座安装在装置平台100的平面上,第一变速箱12设置与第一转动部件11相连,为其传递转动动力,第一电机13设置安装在装置平台100的平面上,并与第一变速箱12连接;
第二牵伸组件2包括第二转动部件21,通过基座安装在可移动组件3上,第二变速箱22设置与第二转动部件21相连,为其提供转动动力,第二电机23设置安装在可移动组件3上,并与第二变速箱22连接;其中第二转动部件21与第一转动部件11水平设置,第一转动部件11的转动轴与第二转动部件21的转动轴位于同一平面内、且相互平行;
可移动组件3包括滑动平台31,滑动平台31底部设置安装有滑轨32与其相适配,滑轨32安装在装置平台100上,滑轨32的延伸方向垂直于第二转动部件21的轴向;滑动平台31上具有适合于设置第二牵伸组件2的平面,且滑动平台31可以沿滑轨32的延伸方向自由滑动。
对纤维绳索101进行预牵伸作业时,将纤维绳索101依次先缠绕在第一转动部件11、然后缠绕在第二转动部件21上,并使纤维绳索101的两个端部保持自由状态,纤维绳索101位于第一转动部件11和第二转动部件21之间的部分保持拉伸状态,启动第一转动部件11和第二转动部件21同步转动,可以使拉伸的纤维绳索处于匀速移动状态,驱动组件4通过移动第二转动部件21,调整与第一转动部件11之间的距离,即可为纤维绳索101施加预牵伸拉力,进行预牵伸作业,预牵伸过程中,张力检测组件5实时监测绳索的实时张力,以便控制驱动组件4的作业。
实施例2
图2为实施例2公开的第一转动部件与第二转动部件设置示意图。
实施例2中,第一转动部件11包括第一转动轴111和设置与其固连的圆柱形第一导辊112,第一导辊112表面设置有第一连续凹槽113,第一连续凹槽113以螺旋状分布在第一导辊112的表面;第一转动部件11设置为顺时针方向转动,如图中R
第二转动部件21包括第二转动轴211和设置与其固连的圆柱形第二导辊212,第二导辊112表面设置有第二连续凹槽213,第二连续凹槽213以螺旋状分布在第二导辊212的表面;第二转动部件21设置为逆时针方向转动,如图中R
第一转动轴111与第二转动轴211在同一平面内平行设置,二者之间的距离为L,即可以认为L是纤维绳索在第一转动部件11和第二转动部件21之间的距离,即绳索间距L;第二转动轴211能够在该平面内移动,以改变绳索间距L;
将纤维绳索101的一端保持自由状态,另一端以顺时针方向在第一连续凹槽113中连续缠绕七次,然后继续以逆时针方向在第二连续凹槽213中连续缠绕七次,之后纤维绳索101的端部处于自由状态;纤维绳索位于第一转动部件11和第二转动部件21之间的部分处于拉伸状态时,其延伸方向与纤维绳索的移动方向保持一致,也与第二转动轴211的移动方向保持一致。
在预牵伸过程中,第一转动部件11以R
实施例3
图3为实施例3公开的纤维绳索预牵伸装置组成示意图。
实施例3中,装置平台100水平设置,包括水平设置的平面以便设置其它组件,其中,第一牵伸组件设置在装置平台100的左侧平面上,在第一牵伸组件的右侧设置有第二牵伸组件,第二牵伸组件设置安装在可移动组件上,可移动组件设置在装置平台100上,并可在装置平台100上自由移动;在第二牵伸组件的右侧方,设置有驱动组件4,张力检测组件5为拉力传感器,适配设置在第一转动部件的转动轴和第二转动部件的转动轴上,以检测纤维绳索受到的张力;
其中,第一牵伸组件包括第一转动部件,通过基座安装在装置平台100的平面上,第一变速箱设置与第一转动部件相连,为第一转动部件传递转动动力,第一电机13设置安装在装置平台100的平面上,并与第一变速箱连接;
第二牵伸组件包括第二转动部件,通过基座安装在可移动组件上,第二变速箱设置与第二转动部件相连,为第二转动部件传递转动动力,第二电机23设置安装在可移动组件上,并与第二变速箱连接;其中第二转动部件与第一转动部件水平设置,第一转动部件的转动轴与第二转动部件的转动轴位于同一平面内、且相互平行;
可移动组件包括移动平台33,移动平台33底部设置安装有与其相适配的滚动轮34,在装置平台100上设置有滚动轨道102,滚动轨道102的延伸方向垂直于第二转动部件的轴向;滚动轮34适配地设置在滚动轨道102中并能沿其延伸方向自由滚动。
控制组件8设置与第一电机13、第二电机23、驱动组件4分别连接;
对纤维绳索101进行预牵伸作业时,将纤维绳索101依次先缠绕在第一转动部件、然后缠绕在第二转动部件上,并使纤维绳索101的两个端部保持自由状态,位于第一转动部件外侧的纤维绳索自由端可以自由放置在第二储绳筐7中,位于第二转动部件外侧的纤维绳索自由端可以自由放置在第一储绳筐6中,纤维绳索101位于第一转动部件和第二转动部件之间的部分保持拉伸状态,启动第一转动部件和第二转动部件同步转动,可以使拉伸的纤维绳索处于匀速移动状态,驱动组件4通过移动第二转动部件,调整与第一转动部件之间的距离,即可为纤维绳索101施加预牵伸拉力,进行预牵伸作业,预牵伸过程中,张力检测组件5实时监测绳索张力,以便控制组件8根据实时张力信息控制驱动组件4。
本申请实施例公开的纤维绳索预牵伸装置,通过调整第一转动部件与第二转动部件之间的距离,实现对纤维绳索的张力控制,进而实现在设定拉伸力作用下的预牵伸,同时通过第一转动部件与第二转动部件的转动带动纤维绳索连续移动,使得纤维绳索在移动中获得连续预牵伸,能够实现对任意长度纤维绳索的预牵伸,而且能够精确控制并设定预牵伸拉力,在纤维绳索预牵伸处理中具有良好的实用价值,在纤维绳索制造领域具有广阔的应用前景。
本申请公开的技术方案和实施例中公开的技术细节,仅是示例性说明本申请的发明构思,并不构成对本申请技术方案的限定,凡是对本申请公开的技术细节所做的没有创造性的改变、替换或组合等,都与本申请具有相同的发明构思,都在本申请权利要求的保护范围之内。