一种细长体入水姿态信息提取的图像处理方法
文献发布时间:2023-06-19 09:46:20
技术领域
本发明属于图像识别领域,具体涉及到一种利用图像处理技术对航行器入水后的位置和姿态角信息进行提取的方法。
背景技术
航行器在空投入水后,其弹道与姿态稳定性往往是研究者的关注重点,在入水初期航行器的运动轨迹和自身姿态对之后是否能够正常水平航行和任务执行存在重大影响。
航行器以一定速度穿越气-水交界面时,将航行器的动能传递给周围的流体,使得流体获得径向扩张的速度,形成随航行器一起向下运动而不断拉长的入水空泡,在这个冲击水面的瞬间,航行器往往受到较高的冲击载荷,其加速度也在此时产生较大的突变。在速度较高的情况下,入水空泡会将航行器完全包裹,使得航行器只有头部与水相接触。随着航行器不断向下运动,航行器姿态发生偏斜,致使航行器尾部拍击空泡壁面,形成尾拍现象。尾拍现象会导致航行器本身的姿态偏转的角加速度发生突变,随着沾湿面积的增加,航行器受到的阻力也会随之增加,最终影响到航行器的航行轨迹。
航行器在入水过程中的姿态角的变化和速度变化通过航行器内部安装位置传感器可以获得,但在利用缩比模型进行入水实验时,由于体积空间的限制,往往不能通过安装传感器的方式获取位置信息和姿态角信息,因此需要通过采用图像处理技术对拍摄的入水工况进行处理,从中提取出实验模型的位置信息和姿态角信息。入水实验的缩比模型在通常情况下为细长圆柱体,因此需要通过提取细长体的表面轮廓从而对细长体入水后的位置信息和姿态角信息进行提取。
由于在入水过程中存在包裹细长体的入水空泡,这使得提取细长体的表面轮廓往往会受到许多干扰因素的影响,这给精确提取细长体轮廓带来了一定程度上的困难。细长体轮廓提取存在的干扰因素主要有以下几点:
(1)在细长体轮廓的提取过程中,往往会受到包裹细长体的空泡轮廓的干扰,因此需要避免空泡轮廓的影响;
(2)当入水图像的环境光分布不均时,细长体轮廓边缘可能会变得模糊,导致不能有效识别;
(3)由于空泡深闭合后,在深闭合点处往往会产生一股射向细长体的射流,使得细长体表面被射流掩盖;
(4)入水空泡的存在会造成折射影响,使得包裹其中的细长体轮廓发生一定的变形,因此需要将得到的细长体边缘点进行折射校正获得在实验框架下的正确坐标位置。
国内魏英杰、王聪等人开发了一种基于灰度梯度的算法,对水下细长体的识别和位置检测做了初步研究,但只适用于单张入水图像的位置检测处理,且要求图像中细长体轮廓边缘清晰无变形,因而不能能批量精确地对细长体入水实验图像进行有效精确识别。目前尚未发现有同类专利或文献,本发明具有创新性。
发明内容
为了克服现有技术的不足,本发明提供一种细长体入水姿态信息提取的图像处理方法,利用图像处理技术对细长体入水后的位置和姿态角信息进行提取,能够有效提取运动体的边缘轮廓并得到实验坐标系下的轮廓散点文件。本发明识别效率高,轮廓提取结果精确,处理速度较快,并且可以进行批量处理。
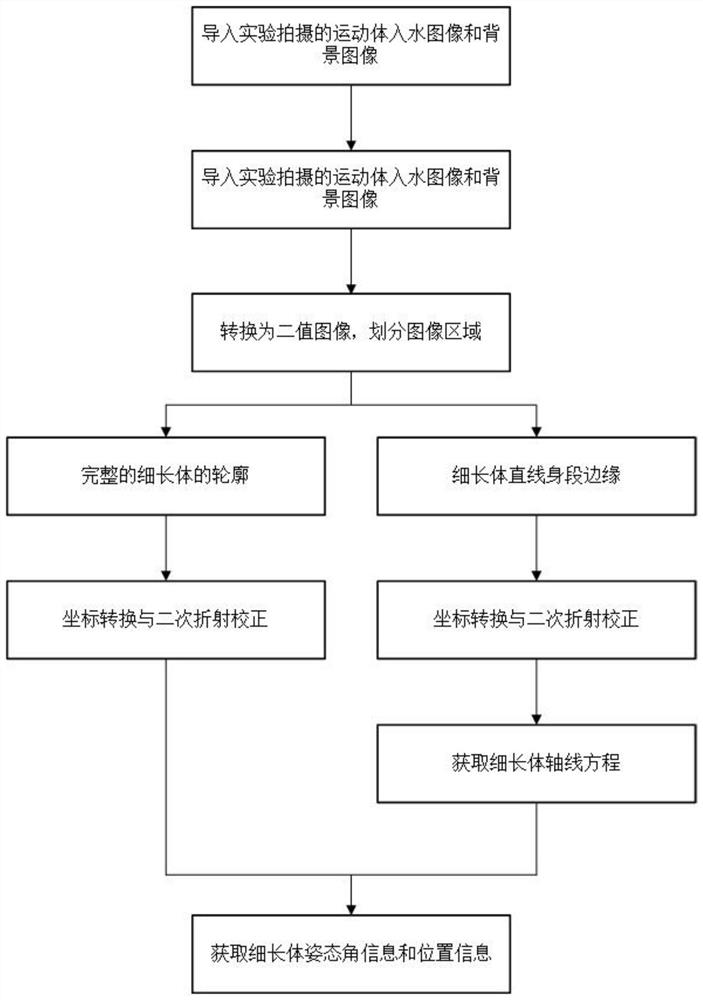
本发明解决其技术问题所采用的技术方案是基于sobel算子的图像边缘提取方法,主要包括以下步骤:
(1)将细长体入水前的背景图像与待处理识别的入水图像转化为灰度图;
(2)根据运动体所处于图像中的位置对灰度图进行区域划分,划分出目标所在区域,对划分出的区域进行背景剔除处理;
(3)调整图像的对比度,利用圆盘形的结构元素对图像进行膨胀腐蚀处理,防止待提取的轮廓出现不连续的现象;
(4)将图像转换为二值图像,在保留细长体轮廓的条件下消除图像中的除头部以外的空泡轮廓,去除图像中的干扰空腔,填充细长体内部存在的空腔,并进行图像平滑处理;
(5)对处理完成的图像区域进行边缘轮廓提取,对提取完成的边缘轮廓进行薄层处理,使得细长体边缘仅有一层散点,对散点进行折射校正,并进行像素坐标变换从而得到实验坐标系下的空泡轮廓散点;
(6)利用霍夫直线检测对得到的边缘散点进行直线边缘检测,获得细长体身段边缘所处的直线方程;根据得到的直线方程求出直线的斜率信息,从而获得当前细长体的姿态角信息;
(7)将身段边缘直线进行平移从而得到细长体的轴线方程,求解轴线方程与细长体边缘轮廓的交点得细长体底部中点的位置,进而得到细长体重心的位置信息。
所述步骤(2)的区域划分是指划分为满足条件
所述步骤(2)的背景剔除是指通过矩阵运算,实验图像E(x,y)减去背景图像B(x,y)得到目标提取图像S(x,y)。
所述步骤(4)选取值为0.3的梯度阈值将图像转换为二值图像。
所述步骤(4)将图像中像素数量小于45的空腔作为干扰空腔,利用bwareaopen函数删除,之后利用imfill函数填充细长体内部含有的空腔,最后利用medfilt2中值滤波函数对二值图像进行小半径平滑处理,从而最大程度上消除图像的噪声。
所述的medfilt2中值滤波函数表示为
所述步骤(5)基于sobel算子对处理完成的图像进行边缘提取,获得大致的细长体边缘图像;利用bwmorph函数对二值图像应用形态学操作,使目标减薄成线;对细长体边缘图像进行进一步区域划分,划分的具体原则为h
所述步骤(5)对提取的边缘散点进行折射校正,折射校正公式为
所述步骤(5)对细长体轮廓像素坐标进行折射校正,得到细长体轮廓的实际坐标值,校正公式为
本发明的有益效果是:能够批量精确识别细长体入水后的边缘轮廓并提取细长体位置信息和姿态角信息,能够快速缩小识别区域,消除入水空泡的干扰因素,得到的姿态角信息和细长体重心的位置信息可用于分析细长体入水后的速度变化和角速度变化等数据处理。
附图说明
图1是本发明具体实施方式中的入水空泡轮廓的提取方法的流程图;
图2是建立的二维笛卡尔坐标系图;
图3是经过对比度调节与平滑处理后的图像;
图4是图像划分完毕后的细长体直线身段边缘图像;
图5是水箱壁面折射示意图;
图6是空泡壁面折射示意图。
具体实施方式
下面结合附图和实施例对本发明进一步说明,本发明包括但不仅限于下述实施例。
本发明提出了一种能够精确识别并批量提取细长体轮廓的从而得到细长体入水后的位置信息和姿态角信息的图像处理方法。细长体入水后的位置信息和姿态角信息对细长体入水姿态的演变特性的研究有着重要意义。
本发明包括以下步骤:
(1)利用MATLAB导入细长体入水前的背景图像与待处理识别的入水图像,并转化为灰度图;
(2)划分识别区域,进行背景剔除处理;
(3)调整图像的对比度,利用圆盘形的结构元素对图像进行膨胀腐蚀处理,防止待提取的轮廓出现不连续的现象;
(4)选取值为0.3的梯度阈值将图像转换为二值图像,在保留细长体的轮廓条件下消除图像中的除头部以外的空泡轮廓,去除图像中的面积小于45像素值的干扰空腔,填充细长体内部存在的空腔,并进行图像平滑处理;
(5)对处理完成的图像区域进行边缘轮廓提取,对提取完成的边缘轮廓进行薄层处理,使得细长体边缘仅有一层散点,利用光学理论对将得到的散点进行折射校正,并进行像素坐标变换从而得到实验坐标系下的空泡轮廓散点。
(6)利用霍夫直线检测对得到的边缘散点进行直线边缘检测,获得细长体身段边缘所处的直线方程。根据得到的直线方程求出直线的斜率信息,从而获得当前细长体的姿态角信息。
(7)将身段边缘直线进行平移从而得到细长体的轴线方程,求解轴线方程与细长体边缘轮廓的交点可得细长体底部中点的位置,进而得到细长体重心的位置信息。
接下来对上述步骤进行展开描述。
步骤一:在MATLAB中导入实验拍摄的运动体入水图像和背景图像,其中背景图像指的是运动体尚未进入高速摄像机视野时刻下的拍摄图像,而入水图像则是指运动体已经穿过液面时刻下的实验图像。导入图像完毕后将图像进行灰度转换,并建立二维笛卡尔坐标系如图2,其中运动体的入水点为原点。
步骤二:根据运动体所处于图像中的位置对图像进行区域划分,从而大大减小处理过程中的运算量,同时可以避免其余不必要的背景干扰,提高边缘检测精度和效率。划分的具体原则如下:
其中D
为了进一步精确提取出细长体边缘轮廓,需要对划分完成后的图像进行背景剔除处理,其中具有整数像素坐标的背景图像B(x,y)和实验图像E(x,y)均有共同的背景,因而可以通过矩阵运算减去实验图像本身的背景得到目标提取图像S(x,y),从而能够单独保留目标细长体,便于对其进行边缘识别和提取。其运算可通过下式进行:
S(x,y)=B(x,y)-E(x,y)
步骤三:利用imadjust函数将已剔除背景的图像进行对比度调节,创建一个指定半径为10像素的平面圆盘形的结构元素,利用该结构元素对图像进行膨胀处理,后仍利用该结构元素对膨胀后的图像进行腐蚀处理,从而去除不重要的微小边缘并且消除了断裂边缘处的不连续性。
步骤四:将处理后的图像转换为二值图像,利用bwareaopen函数删除图像中含有的像素数量小于45的空腔,之后利用imfill函数填充细长体内部含有的空腔,最后利用medfilt2中值滤波函数对二值图像进行小半径平滑处理,从而最大程度上消除图像的噪声。medfilt2中值滤波函数可通过下式表示:
其中p
步骤五:基于sobel算子对处理完成的图像进行边缘提取,获得大致的细长体边缘图像。由于提取完成的边缘层往往含有多层像素点,因此需要利用bwmorph函数对二值图像应用形态学“thin”操作,使目标减薄成线。此外,由于细长体头部与尾部往往处于明暗变化复杂区域,为消除头部与尾部的边缘干扰并得到细长体直线身段边缘图像,对细长体边缘图像进行进一步区域划分,划分的具体原则如下:
h
其中D
为了获得入水空泡边缘散点在实验坐标系下的坐标,在实验图像中,通过对运动体的标定,可测得图像中每个像素点之间的距离在实验坐标系下为δmm,图像中坐标原点所对应的像素位置为(x
P
其中E为和P(x,y)同维度的矩阵,其所有元素均为1。
在实验过程中因为高速摄像机拍摄的实验图像存在有因光线穿过水体和空气间产生的折射误差,因此需要对提取的边缘散点进行折射校正,校正公式如下:
其中p
除了水箱壁面会产生折射现象,细长体入水后的入水空泡也能产生光线折射现象,可近似认为空泡横截面均为圆形,且细长体截面与空泡截面同心,故细长体成像为凹透镜成像,细长体成像大小比真实大小要小。在已知不同深度下的空泡直径的情况下,通过凹透镜成像原理可以精确的对细长体轮廓像素坐标进行折射校正,从而得到细长体轮廓的实际坐标值,校正公式如下:
其中R是当前深度下入水空泡的半径大小,r
步骤六:通过坐标转换和二次折射校正后得到细长体直线身段边缘真实坐标图像,利用霍夫直线检测对细长体直线身段边缘真实坐标图像进行直线检测,得到细长体直线身段边缘的直线方程。
y=kx+b
其中k表示直线方程的斜率,b表示直线方程的截距,通过霍夫直线检测即可得到,根据直线方程的斜率信息从而获得细长体此时的姿态角大小
步骤七:将得到的细长体直线身段边缘的直线方程进行平移操作从而得到细长体的轴线方程:
其中r
将得到的细长体的轴线放入步骤五中通过坐标转换和二次折射校正后的细长体边缘图像中,求得细长体边缘与细长体的轴线的交点,从而得到细长体头部中点的实际坐标。至此,细长体边缘被识别提取完毕。
- 一种细长体入水姿态信息提取的图像处理方法
- 图像处理方法、指纹信息提取方法、装置、设备及介质