一种基于信号强度的单站无源定位方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明属于无源定位领域,特别涉及一种基于信号强度的单站无源定位方法。
背景技术
无源定位技术作为一种定位技术,通常通过观测目标的空域信息、时域信息或频域信息,结合目标运动模型经过滤波从而得到目标的实时状态。目前多数的无源定位研究方法大多采用传统的空时域模型或空频域模型。
霍光的《基于容积卡尔曼滤波的单站无源定位跟踪算法研究》中采用空频域定位模型,以一种新型的Sigma点滤波算法——容积卡尔曼滤波(Cubature Kalman Filter,CKF)为基础展开研究,并在CKF中引入时变渐消因子来调节状态协方差、新息协方差以及互协方差,从而在线调整滤波器增益矩阵,增强系统的自适应跟踪能力。祝咏晨《单站无源定位原理浅析》中探讨了一种基于目标频域和空域参数测量信息,利用固定单站对机动模型进行无源定位跟踪的算法,并在建立目标机动模型与测量方程的基础上运用修整增益的扩展卡尔曼滤波(MGEKF)算法,实现了对机动目标的定位跟踪。张志《机载单站无源定位关键技术研究》同时建立了空时域模型与空频域模型,没有将二者结合而是分别分析并验证两种模型的优劣,并采用UKF对模型进行定位滤波。
这些单站无源定位方法基本均建立在空时域和空频域模型的基础上,观测量相对较少,跟踪算法所能得到的观测信息相对较小,较少的观测信息可能会降低定位跟踪的精度。以下引入信号强度的定义:
信号强度定义为目标接受到信号的强度,当目标与观测站距离越远时,观测站接收到的信号强度越弱,因此可以将这一参数作为定位依据。基于信号强度的定位方式既无需严格的同步保证,也无需成本较高的阵列天线,在其它领域已有较多应用,如室内定位、声源定位、无线定位等,但在单站无源定位中基本没有研究,将其引入无源定位中可弥补这方面的空白。
发明内容
本发明解决的技术问题是:为了提高单站无源定位的精度,使得单站无源定位能够广泛应用于工程上,本发明提供一种基于信号强度的单站无源定位方法。该定位模型中观测方程将角度、到达时间差、多普勒频率、信号强度观测量结合起来构成新的定位模型,通过多参数提高定位性能。仿真结果表明该方法的定位精度较高。
本发明的技术方案是:一种基于信号强度的单站无源定位方法,包括以下步骤:
步骤1:建立信号强度的传输模型并以此作为观测量:
RSS=10log
其中d
步骤2:建立滤波模型,包括以下子步骤:
步骤2.1:状态模型
X(k)=f(k/k-1)X(k-1)+V(k)
其中,
步骤2.2:观测模型:
其中,五个观测量分别为θ、β、f
步骤3:采取滤波方法进行滤波,便可以得到目标的实时状态信息。
本发明进一步的技术方案是:所述步骤3中的滤波方法采用EKF、UKF、IMM、CKF中的一种。
本发明进一步的技术方案是:采用IMM方法进行滤波。
本发明进一步的技术方案是:对所述步骤2中的滤波模型进行GDOP分析,将空时域与空频域、信号强度参量结合起来的定位精度比空时域结合信号强度、空频域结合信号强度得到的定位精度更高。
发明效果
本发明的技术效果在于:本发明引入了信号强度这一新型观测量,旨在通过获得足够多的观测信息应用于跟踪模型从而提高系统的跟踪精度。同时选择更好的滤波方法,以期提高传统无源定位的定位精度。
在传统空时域与空频域模型的基础上引入了信号强度这一新的观测量,使得观测信息更加丰富,能够有效地提高跟踪精度降低跟踪误差。同时采用了滤波误差最小的IMM滤波方法。在两者的同时加持下,整个无源定位方法精度更高、误差更小,相较于传统模型和滤波方法定位精度高。
附图说明
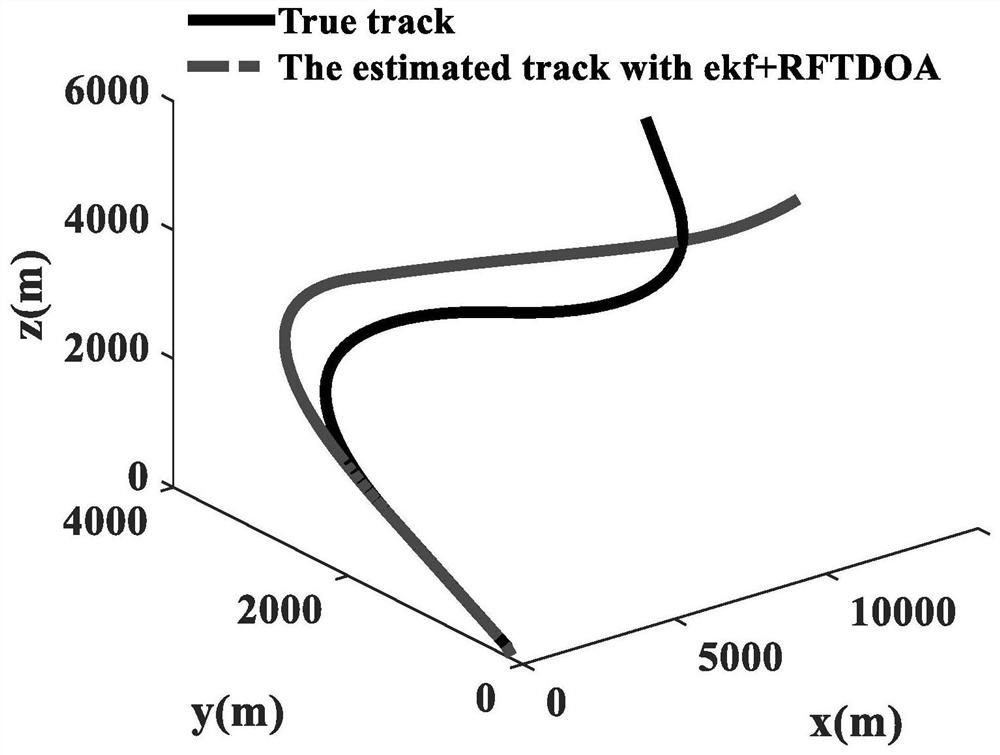
图1RFTDOA定位模型下真实轨迹与EKF算法估计轨迹
图2RFTDOA定位模型下EKF滤波算法的位置、速度平均相对误差及x,y,z轴的位置差
图3RFTDOA定位模型下真实轨迹与UKF算法估计轨迹
图4RFTDOA定位模型下UKF滤波算法的位置、速度平均相对误差及x,y,z轴的位置误差
图5RFTDOA定位模型下真实轨迹与IMM算法估计轨迹
图6RFTDOA定位模型下IMM滤波算法的位置、速度平均相对误差及x,y,z轴的位置误差
图7RFTDOA定位模型下真实轨迹与CKF算法估计轨迹
图8RFTDOA定位模型下UKF滤波算法的位置、速度平均相对误差及x,y,z轴的位置误差
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参见图1-图8,一种基于信号强度的单站无源定位方法,其定位模型特征在传统定位模型的基础上有以下特征:
(1)建立了信号强度的传输模型并拟以此作为观测量;
(2)定位模型中观测方程将角度、到达时间差、多普勒频率、信号强度观测量结合起来构成新的观测模型,定义为RFTDOA模型,此观测模型和状态方程联合起来构成定位模型。此模型通过多参数提高定位性能;
(3)对定位模型进行几何精度稀释因子GDOP分布分析;
(4)在定位模型的基础上分别采用EKF(扩展卡尔曼滤波)、UKF(无迹卡尔曼滤波)、IMM(交互多模型的卡尔曼滤波)、CKF(容积卡尔曼滤波)进行滤波定位并对比,并选择采用IMM作为最合适的滤波方法;
(5)将观测量等输入RFTDOA模型并采用IMM滤波方法进行跟踪滤波便能够实现对目标的定位与跟踪;
所述的信号强度传输模型为:
接收信号强度(RSS)可反映电磁波在当前介质中的能量大小,信号强度值与距离成反比例关系,基于接收信号强度的定位原理都依赖于传输模型,常用于描述信号强度的三种传播模型分别是Free-space模型、Two-ray Ground Reflection模型和Shadowing模型。
并推导得到信号强度的计算公式为:
RSS=10log
其中d
其次建立滤波模型
状态模型:
无源定位过程可以看作是求解定位系统的状态方程与观测方程的过程。采用匀加速运动模型进行目标跟踪,则模型满足以下状态方程:
X(k)=f(k/k-1)X(k-1)+V(k) (2)
其中,
观测模型,即RFTDOA模型
将信号强度观测方程、时域信息、频域信息、空域信息作为联合观测量如下所示,代入定位方程进行观测定位。
式中,五个观测量分别为θ、β、f
之后,对模型进行GDOP分析,观察分析结果可知,将空时域与空频域、信号强度参量结合起来的定位方法比空时域结合信号强度、空频域结合信号强度得到的定位精度更高。在中心区域附近,联合空时域、空频域、信号强度的定位误差分布较稀疏,但随着定位距离的增加,误差分布开始变得密集。
误差分析后选择合适的滤波方法,在新建立的定位模型的基础上分别采用EKF、UKF、IMM、CKF进行滤波定位并对比。选择合适的滤波方法并验证新模型相较传统模型的优越性。
首先,对所述的三种定位模型几何精度稀释因子GDOP分布分析:
RFTDOA模型的定位方法比传统模型定位精度更高。GDOP分布图表明了在定位模型方面,利用多参数思想可以提高系统的定位精度,同时引入较多参数会对滤波算法及计算量提出较大挑战,因此应该全面客观分析多参数定位方法的利弊。
其次,在所述的定位模型的基础上分别采用EKF、UKF、IMM、CKF进行滤波定位并对比为:
EKF滤波方法定位误差较大,精度较差,且与滤波初值的精准度相关,不能很好地跟踪目标。但计算量较小,快速性较好;
UKF滤波方法优于EKF,对初值的依赖较小,能够有效地跟踪目标,但计算量较大,快速性较差。
IMM滤波方法更优于UKF,滤波轨迹基本与真实轨迹吻合,定位精度较高,定位鲁棒性较高,但同样计算量较大,快速性较差。
CKF滤波方法效果次于IMM,定位误差较大,同时计算量大,快速性较差,性价比较低。
综上所述,本专利采取IMM滤波方法进行定位模型的滤波。
所述的将观测量等输入RFTDOA模型并采用IMM滤波方法进行跟踪滤波便能够实现对目标的定位与跟踪:
在定位模型的基础上,当给定运动初值及实时的观测信息并采取IMM滤波方法进行滤波,便可以得到目标的实时状态信息,就此便完成了单站无源定位。
下面采用具体实例对本发明技术方案进行进一步解释说明:
假设目标初始运动状态为X=[100,200,100,20,40,20,2,4,2]',实际运动过程为:0-20s:作匀加速直线运动;20-60s:作角速率为3rad/s的左转弯运动;60-90s:作角速率为3rad/s的右转弯运动;90-100s:作匀速直线运动。考虑实际传感器的测量精度,选取σ
参见图2,模型最终时刻的定位总误差为5.00%,速度总误差为40.52%,x,y,z轴的定位误差分别为:0.89%,27.79%,0.55%。
参见图4,UKF:模型最终时刻的定位总误差为0.60%,速度总误差为16.80%,x,y,z轴的定位误差分别为:0.30%,3.04%,0.08%。
参见图6,IMM:模型最终时刻的定位总误差为1.60%,速度总误差为:14.17%,x,y,z轴的定位误差分别为:0.60%,8.46%,0.39%。
参见图8,模型最终时刻的定位总误差为0.60%。速度总误差为:16.80%,。x,y,z轴的定位误差分别为:0.30%,3.05%,0.08%。
基于仿真结果,选择IMM作为模型的滤波方法。
最后在定位模型的基础上,给定初值及实时的观测信息并采取IMM滤波方法进行滤波,便可以得到目标的实时状态信息。
- 一种基于信号强度的单站无源定位方法
- 一种基于航管应答信号的单站无源定位方法