吞咽障碍病人的智能喂养方法及系统及电子设备
文献发布时间:2023-06-19 19:21:53
技术领域
本发明涉及医疗护理技术领域,尤其涉及一种吞咽障碍病人的智能喂养方法及系统及电子设备。
背景技术
吞咽障碍病人包括植物人、中风病人、脑瘫病人、无吸吮能力的新生儿等,这些病人在护理时,需要通过胃管把食物(譬如流食、奶等)泵入胃中。现有的喂养系统一般定时地通过胃管把食物一次性送入病人胃中。
譬如申请号为202111059434.5,名称为:一种吞咽障碍患者管喂用自动喂食机的发明专利,在需要喂食时通过启动电源开关,调节吸注强度和速度,匀速吸注,虽在一定程度上解放了护理人员的双手,但该喂食机通过定时被动式喂养、持续恒速等喂食方式,不能根据病人生理需求主动式喂养,病人在胃动力下降、胃排空延迟、胃电节律紊乱等情况下容易发生功能性胃潴留,慢性胃炎等症状,特别是对于处于发育期的孩子,该方式不利于孩子(特别是新生婴儿)消化系统的发育。
因此,现有技术还有待于改进和发展。
发明内容
鉴于上述现有技术的不足,本发明提供了一种吞咽障碍病人的智能喂养方法及系统及电子设备,旨在解决现有技术中被动喂养方式易出现消化系统炎症或发育不良的问题。
本发明的技术方案如下:
本发明第一实施例提供了一种吞咽障碍病人的智能喂养方法,包括如下步骤:
通过检测装置实时获取病人的胃生理数据;
根据所述胃生理数据,判断病人是否需要喂养;
当需要喂养时,通过胃管间断式泵送食物至病人胃中,并监测病人的胃生理数据,计算泵入食物的热量;
当监测的胃生理数据为停止喂养时,停止泵送食物。
进一步地,所述的方法还包括:
检测吞咽障碍病人为睡醒状态时,间断式泵送水至病人胃中。
进一步地,所述的方法还包括:检测病人的心率,根据心率判断病人是否为睡醒状态。
所述胃生理数据包括:胃压力、HP值、胃动力。
进一步地,所述的方法还包括:
分析病人的消化能力等级;
根据消化能力等级提示喂养时间间隔、喂养食物量、喂养食物种类。
进一步地,所述的方法还包括:当检测食物反流时,抽吸反流的食物至回收箱,并计算回收量。
所述检测装置包括胃动力检测器,和设置于胃管上的压力检测单元、第一PH值检测单元和第二PH值检测单元,所述第一PH值检测单元位于胃管的末端,用于检测胃内的PH值,所述第二PH值检测单元位于第一PH值检测单元的下侧,插管时,位于食道下括约肌上缘处用于检测食道的PH值。
本发明的另一实施例提供了一种吞咽障碍病人的智能喂养系统,包括:
检测装置,用于实时获取病人的胃生理数据;
数据处理模块,用于根据所述胃生理数据,判断病人是否需要喂养,当需要喂养时,通过胃管间断式泵送食物至病人胃中,并监测病人的胃生理数据,计算泵入食物的热量,当监测的胃生理数据为停止喂养时,停止泵送食物;
食物输送模块,与胃管相连,用于间断式泵送食物至病人胃中。
本发明的另一实施例提供了一种电子设备,所述电子设备包括至少一个处理器;以及,
与所述至少一个处理器通信连接的存储器;其中,
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的吞咽障碍病人的智能喂养方法。
本发明的另一实施例还提供了一种非易失性计算机可读存储介质,所述非易失性计算机可读存储介质存储有计算机可执行指令,该计算机可执行指令被一个或多个处理器执行时,可使得所述一个或多个处理器执行上述的吞咽障碍病人的智能喂养方法。
有益效果:本发明实施例提供的吞咽障碍病人的智能喂养方法及系统及电子设备,通过获取病人的胃生理数据来判断病人是否需要喂养,实现了根据病人生理需要喂养,改变了现有被动式的定时喂养方式,有利于病人消化系统健康和发育,并且采用间断式泵送食物的方式来模拟病人一口一口进食,符合人类进食的规律,进一步有利于病人消化系统健康和消化系统的发育,从而可更科学的喂养植物人、中风病人、脑瘫病人、无吸吮能力的新生儿等患者。
附图说明
下面将结合附图及实施例对本发明作进一步说明,附图中:
图1为本发明一种吞咽障碍病人的智能喂养方法较佳实施例的流程图;
图2为本发明一种吞咽障碍病人的智能喂养方法中检测装置的结构框图;
图3为本发明一种吞咽障碍病人的智能喂养系统的较佳实施例的功能模块示意图;
图4为本发明一种电子设备的较佳实施例的硬件结构示意图。
具体实施方式
为使本发明的目的、技术方案及效果更加清楚、明确,以下对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合附图对本发明实施例进行介绍。
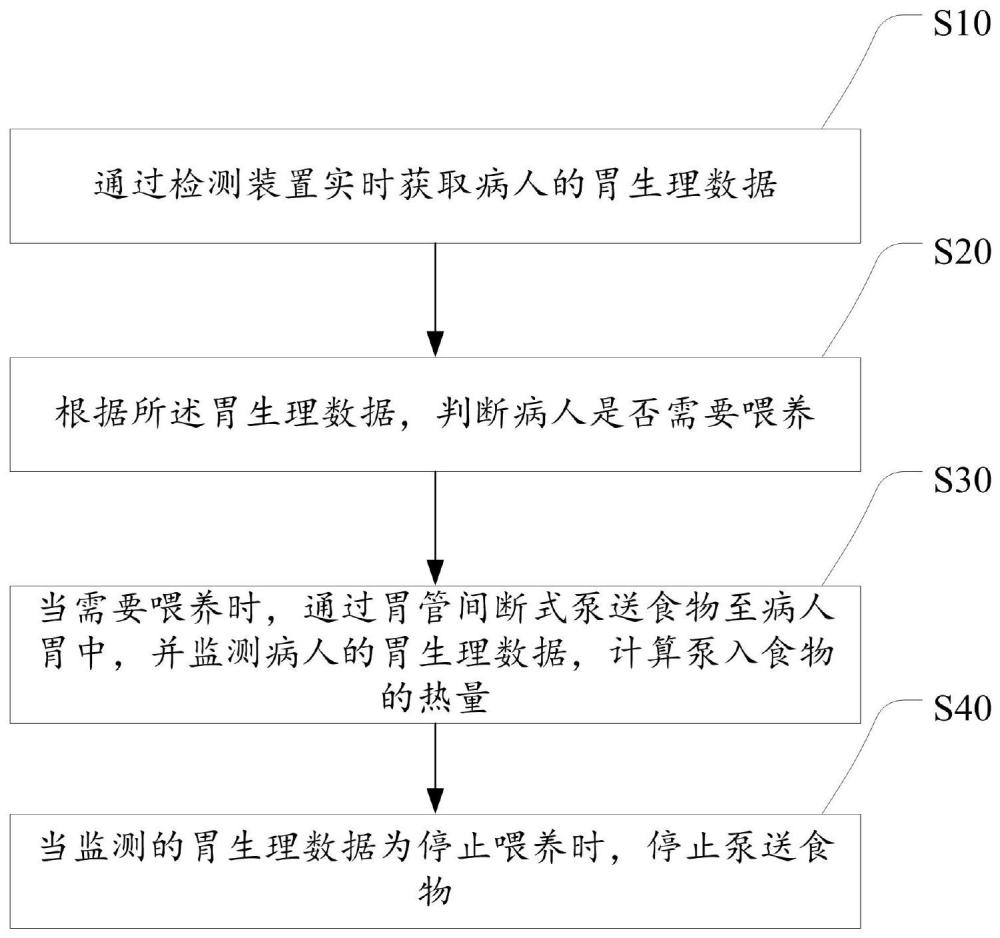
针对上述问题,本发明实施例提供了一种吞咽障碍病人的智能喂养方法,请参阅图1,图1为本发明一种吞咽障碍病人的智能喂养方法较佳实施例的流程图。如图1所示,其包括:
S10、通过检测装置实时获取病人的胃生理数据;
S20、根据所述胃生理数据,判断病人是否需要喂养;
S30、当需要喂养时,通过胃管间断式泵送食物至病人胃中,并监测病人的胃生理数据,计算泵入食物的热量;
S40、当监测的胃生理数据为停止喂养时,停止泵送食物。
本发明通过获取病人的胃生理数据来判断病人是否需要喂养,实现了根据病人生理需要喂养,改变了现有被动式的定时喂养方式,有利于病人消化系统健康和发育,并且采用间断式泵送食物的方式来模拟病人一口一口进食,符合人类进食的规律,进一步有利于病人消化系统健康和消化系统的发育,从而可更科学的喂养植物人、中风病人、脑瘫病人、无吸吮能力的新生儿等患者。
可选地,在步骤S10之前,还包括在食物储存箱中装入食物,并输入患者身高、体重、单位食物热量,并根据食物热量计算每次输泵送的食物量。
可选地实施例中,所述胃生理数据包括但不限于:胃压力、HP值、胃动力等,通过胃部各项生理指标的监测,可准确获知病人是否需要进食。
可选地,所述检测装置包括胃动力检测器、压力检测单元、第一PH值检测单元和第二PH值检测单元,其中,所述压力检测单元、第一PH值检测单元和第二PH值检测单元可设置于胃管上。所述胃管可设置间歇式蠕动泵,用于将食物储存箱中的送入病人胃中。
具体地,所述胃动力检测器可包括检测电极,该检测电路可粘于病人的腹部,检测病人的肌电信息,根据肌电信息获取胃动力数据。
所述压力检测单元和第一PH值检测单元可位于胃管的末端(或者头部),用于分别用于检测胃内的压力和PH值。譬如当人体饥饿时,胃部会收缩,此时压力检测单元监测到压力增加,且第一PH值检测单元会监测到胃部的PH值会上升。当病人进食后,胃部压力和PH值都会降低,当降低到设定值时,表示病人已吃饱,从而可停止喂食。
在其它实施例中,所述胃管可采用多孔道压力集合管,其可测量胃不同位置的压力变化,胃管上位于胃的近端设有恒压器,定量测定胃上部的收缩压和舒张压,以及胃窦收缩频率和平均波辐,来获取病人胃动力、蠕动情况等。
可选地,所述步骤S20包括:
S201、预先获取不同年龄段饥饿状态时,胃内压力值、PH值、胃动力的对应关系表;
S202、根据胃部实时监测的压力、PH值或胃动力数值查找所述对应关系表,得病人是否处于饥饿状态。
如图2所示,为了得到更精准的胃生理数据,本发明的吞咽障碍病人的智能喂养方法中,在压力检测单元、第一PH值检测单元、第二PH值检测单元、胃动力检测器的输出端分别设置有第一滤波放大单元、第二滤波放大单元通过二次放大的同时并滤除噪声,避免将噪声一起放大,从而能获取更准确的胃生理数据信息。
可选地,第一滤波放大单元、第二滤波放大单元各将信号放大10倍,最终得到放大100倍的模拟信号,以便于数据处理模块进行模数转换及处理。如果将压力检测单元、第一PH值检测单元、第二PH值检测单元、胃动力检测器的输出信号直接放大100倍,压力检测单元、第一PH值检测单元、第二PH值检测单元、胃动力检测器输出的噪声幅度也随之增大,压力检测单元、第一PH值检测单元、第二PH值检测单元、胃动力检测器获取的信号也会出现失真,本发明采用将信号二次放大,在放大的同时通过电容滤波,避免将噪声一起放大,从而增加抑制干扰能力,而且也便于数据处理模块后续进行数据处理,从而能准确得知病人是否处于生理饥饿状态,从而更科学的喂养。
本发明的吞咽障碍病人的智能喂养方法还包括:检测吞咽障碍病人为睡醒状态时,间断式泵送水至病人胃中。
由于喂养植物人、中风病人、脑瘫病人、无吸吮能力的新生儿无法表达自己是否需要进食和水,而水份的补充对病人的健康也特别重要,如中风瘫痪的病人半夜醒来,需要适量饮水,本发明可自动监测病人睡醒状态,及时补充水分,有利于促进病人代谢及健康的恢复。
一在具体的实施例中,通过检测病人的心率,根据心率判断病人是否为睡醒状态,从而可自动捕捉到病人状态,降低护理人员的劳动强度,特别是深夜时,通过自动喂食及喂水的方式,护理人员可安心休息。
譬如,当病人的心率下降且比较平稳时,判断病人为睡眠状态,当病人的心率上升且存在波动时,判断病人为睡醒状态。对于醒来时会睁眼的病人,本发明还可增设摄像头来判断病人是否睡醒,进一步提高监测的准确性。
为实现更科学的喂养,本发明的吞咽障碍病人的智能喂养方法还包括:分析病人的消化能力等级;根据消化能力等级提示喂养时间间隔、喂养食物量、喂养食物种类,并根据病人的年龄、体脂计算病人每次的热量摄入量,从而能更科学地喂养,有利于病人身体恢复。
譬如:当护理无吸吮能力的新生儿时,随着新生儿胎龄的增加,喂养时间间隔和喂养食物量,从而能有利于新生儿的消化系统的发育。
又如:中风病人身体好转、消化能力提升时,本发明能根据消化能力等级实时匹配相应的喂养方案。或者病人身体肥胖时,适当减少食物热量,更有利于身体恢复。
其中,提示方式可以通过显示屏显示,也可推送到绑定的手机,从而能及时更改喂养方案,并且通过该显示屏输入每次胃食需泵送的热量。
进一步的实施例中,为防止病人呕吐弄脏衣物,或食道堵塞发生窒息事件,本发明提供的吞咽障碍病人的智能喂养方法还包括:当检测食物反流时,抽吸反流的食物至回收箱,并计算回收量,根据回收量评估病人消化道健康状态,并对下次喂食的策略做调整,同时输出告警信息至绑定的终端,提醒护理人员关注反流情况。
譬如当回收箱中的反流物超过第一设定值时,降低泵的速度、增加每次泵送食物的时间间隔,使有利于病人胃部缓慢入食,逐渐消化。
本发明还可根据每次喂养时的反流次数和时间间隔,输出相应的喂养方案,譬如反流的量大或频繁时,减少每次喂养的食物量,增加喂食次数,只要使病人每天进食的热量达标即可。
在一具体的实施例中,所述第二PH值检测单元位于第一PH值检测单元的下侧,插管时,位于食道下括约肌上缘处用于检测食道的PH值,在食物反流时,能实时检测PH值变化,及时发现食物反流,并及时将反流的食物抽吸干净,防止病人窒息,同时通过输出告警信息,以便于医院人员观察病人的状态。
当连续多次检测食物反流时,本发明还根据反流食物的量、PH值等,输出相应的食物喂养方案,从而及时更换喂养方案,从而有利于保护病人消费系统。
进一步的实施例中,本发明的吞咽障碍病人的智能喂养方法还包括:在口腔中固定至少一细孔管,在喂养时,每隔预设时间泵送少量食物或水至病人口腔中,训练病人的吞咽功能,从而能在喂养时的同时刺激食道运动,防止食物反流,微弱的吞嗯能力也能促进胃部排出空气。
进一步的实施例中,本发明的吞咽障碍病人的智能喂养方法还包括:对食物和水保温处理,以防止冷和烫的食物刺激或损伤病人的消费道。
进一步地,当检测供料盒中的食物或水超过预设时间没更换时,输出告警信息,提示护理人员更换。
需要说明的是,上述各步骤之间并不必然存在一定的先后顺序,本领域普通技术人员,根据本发明实施例的描述可以理解,不同实施例中,上述各步骤可以有不同的执行顺序,亦即,可以并行执行,亦可以交换执行等等。
本发明另一实施例提供一种吞咽障碍病人的智能喂养系统,如图3所示,系统1包括:
检测装置11,用于实时获取病人的胃生理数据;
数据处理模块12,用于根据所述胃生理数据,判断病人是否需要喂养,当需要喂养时,通过胃管间断式泵送食物至病人胃中,并监测病人的胃生理数据,计算泵入食物的热量,当监测的胃生理数据为停止喂养时,停止泵送食物;
食物输送模块13,与胃管相连,用于间断式泵送食物至病人胃中。
所述检测装置11包括压力检测单元、第一PH值检测单元、第二PH值检测单元、胃动力检测器和分别设置于压力检测单元、第一PH值检测单元、第二PH值检测单元、胃动力检测器的第一滤波放大单元、第二滤波放大单元,通过二次放大的同时并滤除噪声,避免将噪声一起放大,从而能获取更准确的胃生理数据信息。
具体实施方式见方法实施例,此处不再赘述。
本发明另一实施例提供一种电子设备,如图4所示,电子设备10包括:
一个或多个处理器110以及存储器120,图4中以一个处理器110为例进行介绍,处理器110和存储器120可以通过总线或者其他方式连接,图4中以通过总线连接为例。
处理器110用于完成电子设备10的各种控件逻辑,其可以为通用处理器、数字信号处理器(DSP)、专用集成电路(ASIC)、现场可编程门阵列(FPGA)、单片机、ARM(AcornRISCMachine)或其它可编程逻辑器件、分立门或晶体管逻辑、分立的硬件控件或者这些部件的任何组合。还有,处理器110还可以是任何传统处理器、微处理器或状态机。处理器110也可以被实现为计算设备的组合,例如,DSP和微处理器的组合、多个微处理器、一个或多个微处理器结合DSP核、或任何其它这种配置。
存储器120作为一种非易失性计算机可读存储介质,可用于存储非易失性软件程序、非易失性计算机可执行程序以及模块,如本发明实施例中的吞咽障碍病人的智能喂养方法对应的程序指令。处理器110通过运行存储在存储器120中的非易失性软件程序、指令以及单元,从而执行设备10的各种功能应用以及数据处理,即实现上述方法实施例中的吞咽障碍病人的智能喂养方法。
存储器120可以包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需要的应用程序;存储数据区可存储根据设备10使用所创建的数据等。此外,存储器120可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实施例中,存储器120可选包括相对于处理器110远程设置的存储器,这些远程存储器可以通过网络连接至设备10。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
一个或者多个单元存储在存储器120中,当被一个或者多个处理器110执行时,执行上述任意方法实施例中的吞咽障碍病人的智能喂养方法,例如,执行以上描述的图1中的方法步骤S10至步骤S40。
本发明实施例提供了一种非易失性计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,该计算机可执行指令被一个或多个处理器执行,例如,执行以上描述的图1中的方法步骤S10至步骤S40。
作为示例,非易失性存储介质能够包括只读存储器(ROM)、可编程ROM(PROM)、电可编程ROM(EPROM)、电可擦ROM(EEPROM)或闪速存储器。易失性存储器能够包括作为外部高速缓存存储器的随机存取存储器(RAM)。通过说明并非限制,RAM可以以诸如同步RAM(SRAM)、动态RAM、(DRAM)、同步DRAM(SDRAM)、双数据速率SDRAM(DDRSDRAM)、增强型SDRAM(ESDRAM)、Synchlink DRAM(SLDRAM)以及直接Rambus(兰巴斯)RAM(DRRAM)之类的许多形式得到。本文中所描述的操作环境的所公开的存储器控件或存储器旨在包括这些和/或任何其他适合类型的存储器中的一个或多个。
本发明的另一种实施例提供了一种计算机程序产品,计算机程序产品包括存储在非易失性计算机可读存储介质上的计算机程序,计算机程序包括程序指令,当程序指令被处理器执行时,使处理器执行上述方法实施例的吞咽障碍病人的智能喂养方法。例如,执行以上描述的图1中的方法步骤S10至步骤S40。
以上所描述的实施例仅仅是示意性的,其中作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际需要选择其中的部分或者全部模块来实现本实施例方案的目的。
通过以上的实施例的描述,本领域的技术人员可以清楚地了解到各实施例可借助软件加通用硬件平台的方式来实现,当然也可以通过硬件实现。基于这样的理解,上述技术方案本质上或者说对相关技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存在于计算机可读存储介质中,如ROM/RAM、磁碟、光盘等,包括若干指令用以使得一台计算机系统(可以是个人计算机,服务器,或者网络系统等)执行各个实施例或者实施例的某些部分的方法。
除了其他之外,诸如"能够'、"能"、"可能"或"可以"之类的条件语言除非另外具体地陈述或者在如所使用的上下文内以其他方式理解,否则一般地旨在传达特定实施方式能包括(然而其他实施方式不包括)特定特征、元件和/或操作。因此,这样的条件语言一般地还旨在暗示特征、元件和/或操作对于一个或多个实施方式无论如何都是需要的或者一个或多个实施方式必须包括用于在有或没有输入或提示的情况下判定这些特征、元件和/或操作是否被包括或者将在任何特定实施方式中被执行的逻辑。
已经在本文中在本说明书和附图中描述的内容包括能够提供吞咽障碍病人的智能喂养方法及系统的示例。当然,不能够出于描述本公开的各种特征的目的来描述元件和/或方法的每个可以想象的组合,但是可以认识到,所公开的特征的许多另外的组合和置换是可能的。因此,显而易见的是,在不脱离本公开的范围或精神的情况下能够对本公开做出各种修改。此外,或在替代方案中,本公开的其他实施例从对本说明书和附图的考虑以及如本文中所呈现的本公开的实践中可能是显而易见的。意图是,本说明书和附图中所提出的示例在所有方面被认为是说明性的而非限制性的。尽管在本文中采用了特定术语,但是它们在通用和描述性意义上被使用并且不用于限制的目的。
- 一种吞咽障碍病人进食床位智能角度调节器
- 智能医用手环、住院病人管理系统和判断病人离院的方法