一种气室式局部干法水下焊接机器人
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及水下作业技术领域,具体为一种气室式局部干法水下焊接机器人。
背景技术
水下焊接技术是海洋管线、海洋平台、船舶、核电设备维护及抢修等领域的关键技术,水下局部干法焊接具有焊接效果好、成本低的优点,目前主要有水下TIG焊接、水下MIG/MAG焊、水下激光-电弧复合焊等几种常用的局部干法水下焊接技术,而目前技术以移动排水罩居多,所形成的局部干腔不够稳定,动密封实现较为困难,使焊接所受影响因素过多,造成焊接质量难以控制。
针对上述问题,急需在原有水下焊接机器人结构的基础上进行创新设计。
发明内容
本发明的目的在于提供一种气室式局部干法水下焊接机器人,以解决上述背景技术中提出现有水下焊接技术在焊接质量方面的不足的问题。
为实现上述目的,本发明提供如下技术方案:一种气室式局部干法水下焊接机器人,包括浮体、耐压舱、机器人框架、电池、保护气压缩瓶、三角形行走履带和螺旋桨,所述浮体安装在机器人框架顶部,且机器人框架顶部和尾部分别对称设置一对螺旋桨,并且内部安装耐压舱,所述机器人框架底盘安装焊接前处理模块、水下焊接工作模块电池以及发动机,且发动机通过传动轴与三角形行走履带相连。
优选的,所述电池分别安装于机器人框架底盘的前部和后部,且在电池前安装电机,并且电机为第一液压泵和第二液压泵提供动力。
优选的,所述焊接前处理模块包括第一液压泵、引射管、机械臂、第一喷射泵,且第一液压泵安装在机器人框架底盘正面前部,并且机械臂对称安装在机器人框架底盘背面前部,同时机械臂末端安装钻头,并且最终通过引射管与第一液压泵相连,同时共同组成第一喷射泵。
优选的,所述水下焊接工作模块包括液压杆、气室体、第二液压泵、焊接轨道、焊枪、公母接头,且液压杆安装于机器人框架底盘背面中部,并且液压杆其末端铰接对称设置的气室体,同时设置气室开合控制杆实现气室体的开启和关闭。
优选的,所述气室体的外表面呈凹陷状半圆形结构,且左右对称,并且气室体顶部安装保护气输入管并最终与安装在机器人框架正面中部的保护气压缩瓶相连。
优选的,所述气室体内部安装焊接轨道,且焊枪通过滑块安装在焊接轨道内部,并且气室体内部左右分别设置公母接头,同时气室体闭合后自动连接。
优选的,所述气室体底部安装排水管并通过管道与安装在机器人框架正面的第二液压泵共同构成第二喷射泵。
与现有技术相比,本发明的有益效果是:该气室式局部干法水下焊接机器人;
1.第二喷射泵本水下焊接机器人具备焊接前处理模块,拥有对管道焊接部位预处理的功能,改善实际焊接条件,采用气室式局部干法水下焊接技术,便于形成一个较为稳定的干式空间,保障了焊接效果,并且具有前处理模块,使实际焊接过程更易达到理想状态;
2.第二喷射泵焊接前处理模块采用喷射泵抽吸泥沙,可以有效排出焊接部位的泥沙,方便进行下一步的焊接工作;
3.第二喷射泵本水下焊接机器人采用气室式局部干法技术,形成的局部干腔较为稳定,易取得良好的焊接效果;
4.第二喷射泵气室采用喷射泵进行排水,可以避免因吸高过大使泵无法排水,同时防止气室内残留的泥沙损坏泵浦。
附图说明
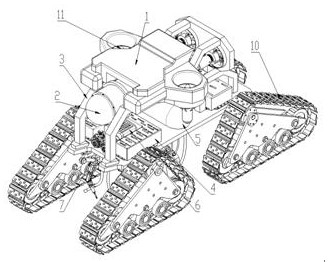
图1为本发明立体结构示意图;
图2为本发明浮体正视结构示意图;
图3为本发明浮体侧视结构示意图;
图4为本发明浮体俯视结构示意图;
图5为本发明浮体仰视结构示意图;
图6为本发明焊接前处理模块局部结构示意图;
图7为本发明水下焊接工作模块侧视局部结构示意图;
图8为本发明水下焊接工作模块正视局部结构示意图;
图9为本发明气室体仰视结构示意图。
图中:1、浮体;2、耐压舱;3、机器人框架;4、电池;5、保护气压缩瓶;6、电机;7、焊接前处理模块;71、第一液压泵;72、引射管;73、机械臂;74、钻头;75、第一喷射泵;8、水下焊接工作模块;81、液压杆;82、气室体;83、气室开合控制杆;84、保护气输入管;85、第二液压泵;86、第二喷射泵;87、焊接轨道;88、滑块;89、焊枪;810、公母接头;9、发动机;10、三角形行走履带;11、螺旋桨。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-9,本发明提供一种技术方案:一种气室式局部干法水下焊接机器人,包括浮体1、耐压舱2、机器人框架3、电池4、保护气压缩瓶5、电机6、焊接前处理模块7、液压泵71、引射管72、机械臂73、钻头74、喷射泵75、水下焊接工作模块8、液压杆81、气室体82、气室开合控制杆83、保护气输入管84、液压泵85、喷射泵86、焊接轨道87、滑块88、焊枪89、公母接头810、发动机9、三角形行走履带10和螺旋桨11,浮体1安装在机器人框架3顶部,且机器人框架3顶部和尾部分别对称设置一对螺旋桨11,并且内部安装耐压舱2,机器人框架3底盘安装焊接前处理模块7、水下焊接工作模块8电池4以及发动机9,且发动机9通过传动轴与三角形行走履带10相连。
电池4分别安装于机器人框架3底盘的前部和后部,且在电池4前安装电机6,并且电机6为第一液压泵71和第二液压泵85提供动力,将不同的电力系统提供给不同的位置进行使用。
焊接前处理模块7包括第一液压泵71、引射管72、机械臂73、第一喷射泵75,且第一液压泵71安装在机器人框架3底盘正面前部,并且机械臂73对称安装在机器人框架3底盘背面前部,同时机械臂73末端安装钻头74,并且钻头74外部设置空心管道,并且最终通过引射管72与第一液压泵71相连,同时共同组成第一喷射泵75,用以排出钻孔挖沟时产生的泥沙。
水下焊接工作模块8包括液压杆81、气室体82、第二液压泵85、焊接轨道87、焊枪89、公母接头810,且液压杆81安装于机器人框架3底盘背面中部,并且液压杆81其末端铰接对称设置的气室体82,同时设置气室开合控制杆83实现气室体82的开启和关闭,方便在使用时装置可通过装置实现较稳定的运动,避免相互之间出现碰撞。
气室体82的外表面呈凹陷状半圆形结构,且左右对称,并且气室体82顶部安装保护气输入管84并最终与安装在机器人框架3正面中部的保护气压缩瓶5相连,具有一定的保护性能,避免出现损坏。
气室体82内部安装焊接轨道87,且焊枪89通过滑块88安装在焊接轨道87内部,可自由活动,并且气室体82内部左右分别设置公母接头810,同时气室体82闭合后自动连接,形成密封,防止漏气。
气室体82底部安装排水管并通过管道与安装在机器人框架3正面的第二液压泵85共同构成第二喷射泵86,便于在使用时完成排水操作。
工作原理:在使用该气室式局部干法水下焊接机器人时,根据图1,首先将该装置放置在需要进行工作的位置,通过电池4的传输电力至电机6上,并调整浮体1、耐压舱2以及机器人框架3,控制螺旋桨11以及本水下焊接机器人到达指定工作区域,调整机器人姿态使发动机9带动三角形行走履带10进行移动,跨过需维修的水下管道,机器人头部面向焊接部位,控制机器人前进,在机械臂73接近焊接部位后停止,通过焊接前处理模块7,启动钻头74将焊接部位周边的泥沙打碎,并采用引射管72、第一液压泵71以及第一喷射泵75排出,目的是使需要焊接的部位暴露在环境中,方便下一步气室体82对焊接部位进行包覆,前处理结束后,机器人向前运动,使水下焊接工作模块8正对着需焊接的部位,控制液压杆81下降,同时气室开合控制杆83控制气室体82完成对焊接部位的包覆,气室体82闭合后,公母接头810自动扣合,控制保护气压缩瓶5向气室体82内充气,同时第二液压泵85启动,使第二喷射泵86工作,进行排水操作,在气压满足要求后,控制焊枪89连接的滑块88在焊接轨道87的内表面滑动,再进行焊接工作,焊接工作完成后,公母接头810解锁,保护气输入管84关闭,气室开合控制杆83控制气室体82打开并脱离水下管道,第二液压泵85停止工作,控制液压杆81将气室体82抬起,焊接工作全部完成,增加了整体的实用性。
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种气室式局部干法水下焊接机器人
- 双层气室式局部干法水下焊接装置