一种自适应的巡航飞行除草机
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及一种新型的飞行除草机,属于除草机领域。
背景技术
除草机又称割草机、剪草机、草坪修剪机等。除草机是一种用于修剪草坪、植被等的机械工具,它是由刀盘、发动机、行走轮、行走机构、刀片、扶手、控制部分组成。随着科学技术的飞速发展,除草机也得到了技术改进,使用除草机可以进行快速除草,节省了除草工人的作业时间,减少了大量的人力资源,但现有技术依然需要人力去调整调控除草机,处理大面积杂草坪仍然会耗费大量的人力财力。
发明内容
针对现有技术存在的不足,本发明的目的是提供一种新型除草机,不需要人力调整,节省更多的人力财力,解决现有技术无法跨越的障碍。
为了实现上述目的,本发明是通过如下的技术方案来实现:一种自适应的巡航飞行除草机,包括由机体和固定在机体上的螺旋桨、螺旋桨护罩共同组成的飞行器;所述机体上方安装有视觉识别摄像头、超声波传感器和综合处理板;所述机体下方固定有电池模组、悬架和割草机外壳,所述悬架位于机体与割草机外壳的中间,电机位于机体与割草机外壳中间,并与割草机外壳相连;所述悬架下端设有四个车轮,其中后端两个车轮中安装有驱动电机;割草绳与电机转轴相连,位于割草机外壳里面;所述综合处理板上设有Arduino,树莓派单片机,MPU6050陀螺仪,电机驱动模块和GPS定位模块;所述视觉识别摄像头与Arduino相连,GPS定位模块与树莓派单片机相连,超声波传感器与Arduino相连,电机驱动模块与Arduino相连。
所述GPS定位模块将数据反馈给树莓派单片机,从而自动规划除草路线,控制飞行器飞行到指定地点,到达指定地点后,视觉识别摄像头将图像数据反馈给Arduino,从而判断该除草区域环境状况,环境状况符合后,超声波传感器检测离地高度,将数据反馈给Arduino,从而控制飞行器降落,降落后开展除草工作,该区域除草工作结束,飞行器将根据规划好的路径,飞到下一工作区域,以此往复,直到除草工作结束。
本发明所述MPU6050陀螺仪用于保证飞行器的平衡状态,飞行器下方的电池模组为飞行器提供续航能力,悬架用于支撑车轮,后两车轮的驱动电机为车轮提供动力,除草机外壳与割草绳用于直接除草工作。
作为本发明的一种优选技术方案,所述螺旋桨一共有四个,飞行器为四旋翼,可提供更大的动力。
本发明所述GPS定位模块与树莓派单片机可为飞行器规划路线,使飞行器拥有自动巡航功能,当除草机到下一区域开展除草工作时,不需要人力调整,飞行除草机可自行前往。
所述视觉识别摄像头将图像数据反馈给Arduino,从而判断该除草区域环境状况,若适合除草,则开展除草工作,反之,则飞往下一除草地点。
所述超声波传感器将数据反馈给Arduino,Arduino,Arduino控制电机转动,若车轮触地,则电机转动。
作为本发明的一种优选技术方案,车轮的数量为四个,可保障除草机在工作中的平衡状态,并且车轮的材质为碳纤维,质地更轻,为飞行器减少更多的阻力。
作为本发明的一种优选技术方案,所述悬架设计为“井”字架,支撑力更强。
作为本发明的一种优选技术方案,除草部分放弃刀片,采用割草绳,质量更轻,为飞行器减少阻力。
附图说明
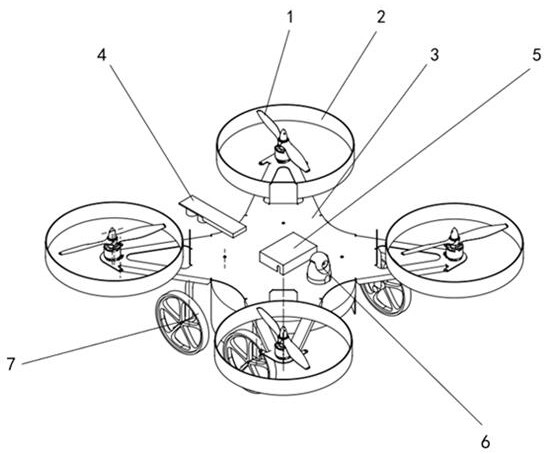
图1为本发明的结构示意图;
图2为本发明的结构三视图;
图3为本发明的剖面图;
图4为视觉识别摄像头的放大图;
图5为车轮处驱动电机的放大图;
图6为割草绳的结构示意图。
图中:1-螺旋桨,2-螺旋桨护罩,3-机体,4-超声波传感器,5-综合处理板,6-视觉识别摄像头,7-驱动电机,8-悬架,9-车轮,10-电机,11-割草机外壳,12-割草绳。
具体实施方式
以下结合附图对本发明作进一步说明。
实施例
如图1-6所示,一种自适应的巡航飞行除草机,包括由机体3和固定在机体上的螺旋桨1、螺旋桨护罩2共同组成的飞行器;所述机体3上方安装有视觉识别摄像头6、超声波传感器4和综合处理板5;所述机体3下方固定有电池模组、悬架8和割草机外壳11,所述悬架8位于机体3与割草机外壳11的中间,电机10位于机体3与割草机外壳11中间,并与割草机外壳11相连;所述悬架8下端设有四个车轮9,其中后端两个车轮9中安装有驱动电机7;割草绳12与电机10转轴相连,位于割草机外壳11里面;所述综合处理板5上设有Arduino,树莓派单片机,MPU6050陀螺仪,电机驱动模块和GPS定位模块;所述视觉识别摄像头与Arduino相连,GPS定位模块与树莓派单片机相连,超声波传感器4与Arduino相连,电机驱动模块与Arduino相连。
所述悬架8和割草机外壳11通过阴阳螺柱与机体3相连。
工作时,GPS定位模块将数据反馈给树莓派单片机,从而自动规划除草路线,控制飞行器飞行到指定地点,到达指定地点后,视觉识别摄像头6将图像数据反馈给Arduino,从而判断该除草区域环境状况,环境状况符合后,超声波传感器4检测离地高度,将数据反馈给Arduino,从而控制飞行器降落,降落后开展除草工作,该区域除草工作结束,飞行器将根据规划好的路径,飞到下一工作区域,以此往复,直到除草工作结束。
- 一种自适应的巡航飞行除草机
- 自适应巡航控制系统和包括自适应巡航控制系统的车辆