一种产生转子扭转振动的装置及其方法
文献发布时间:2023-06-19 13:26:15
本发明涉及旋转机械实验系统领域,具体是指一种产生转子扭转振动的装置及其方法。
背景技术
旋转机械轴系统在运行过程中,由于扭矩载荷的波动会发生扭振现象,诸如汽轮机,离心压缩机,汽车和船舶内燃机,螺旋桨驱动系统,旋转泵等。当这样的动态载荷中的某个频率成分与轴系统结构固有扭转频率趋于一致时,轴系统可能会产生剧烈的扭转共振,这极易导致零部件的损坏和失效。因此在轴系统产品设计开发、产品改进或者故障诊断的过程中,经常需要通过模态分析技术测量其固有扭转频率,扭转激振器即是该测试系统的组成设备之一。除了运用于旋转机械分析,扭转激振器还可以对于轴系统实施各种扭振实验,比如产品耐久性实验,产品扭振响应实验等等。
中国专利号CN201310541227.2提出的一种转子扭振激励与振动分析实验系统,通过信号发生器产生交变信号经过功率放大器和变压器作用后与直流稳压线性电源的输出叠加作为直流电机的输入,使其输出波动扭矩。该方法采用直流电机,在电机换向时会产生转矩脉动,且脉动频率随转速变化,不利于产生纯净频率的扭转振动。
发明内容
本发明要解决的技术问题是解决上述问题,提供一种产生转子扭转振动的装置及其方法。
为解决上述技术问题,本发明提供的技术方案为:一种产生转子扭转振动的方法,包括单片机、整流电路、逆变器、电流传感器、位置传感器、门极驱动电路、永磁同步电机,所述整流电路、逆变器、电流传感器依次通过导线电性连接,所述单片机通过门极驱动电路与逆变器电性连接,所述位置传感器与单片机电性连接,所述电流传感器与单片机电性连接,所述单片机设有通信接口,所述单片机通过位置传感器检测永磁同步电机转子位置,所述单片机通过电流传感器检测永磁同步电机相电流,采用矢量控制策略,输出脉宽调制信号,通过逆变器输出三相交流电驱动永磁同步电机,且控制其交轴电流按正弦规律变化,从而使永磁同步电机输出按正弦规律变化的转矩,从而产生扭转振动,所述单片机通过通信接口与外部主机通信,获取扭转振动的频率目标值和幅值目标值,具体包括以下方法:
S1、永磁同步电机交轴输入电压和交轴电流关系为线性,当交轴输入电压为正弦时得到频率相同但幅值和相位不同的交轴电流波形,
S2、控制目标为交轴电流的幅值和频率,频率目标值输入到sin信号发生器,生成一个标准幅值目标频率的正弦信号sin输出值,正弦信号sin输出值与幅值校正系数相乘后,作为交轴电压施加到永磁同步电机上,得到正弦变化的交轴电流,
S3、根据检测到的交轴电流得到此时的交轴电流幅值,将交轴电流幅值目标值与其作差,然后进行PI运算,得到sin幅值校正系数,与正弦信号sin输出值进行相乘后得到sin校正输出值,实现对电流幅值的闭环控制,
S4、所述永磁同步电机产生反电动势时,通过永磁同步电机转速结合永磁同步电机反电势常数进行反电势补偿并增加电流偏置补偿环节,将交轴电流闭环到零,
S5、所述电流幅值的检测,通过一个完整正弦周期内的电流最大值减去最小值后除以2获得。
采用以上结构后,本发明具有如下优点:采用矢量控制策略控制永磁同步电机,使其交轴电流按正弦规律变化从而产生扭转振动,扭转振动频率范围可以实现0.1到1000Hz,频率范围较宽;采用跟踪正弦目标电流幅值的方法控制扭转振动的幅度,响应速度快且幅值精度较高,对交轴电流直流偏置进行补偿,去除了输出转矩中的直流分量。
作为改进,所述电流偏置补偿包括获取交轴电流的直流偏置,交轴电流的直流偏置通过一个完整正弦周期内的电流最大值加上最小值后除以2获得。
作为改进,在频率较低时,通过幅值目标值乘以sin输出值,与交轴电流作差后进行PI运算得到幅值校正系数。
作为改进,在频率较低时,使用增强型锁相环EPLL对交轴电流的幅值进行跟踪,获取交轴电流的幅值,进而计算幅值校正系数。
附图说明
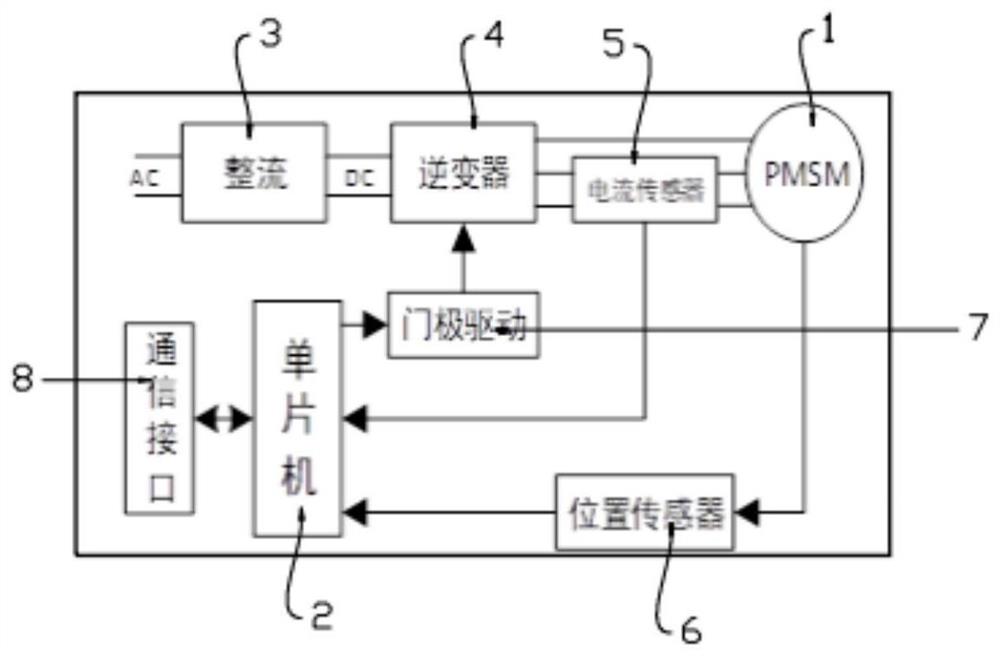
图1是本发明一种产生转子扭转振动的装置及其方法的结构示意图。
图2是本发明一种产生转子扭转振动的装置及其方法的控制原理框图。
如图所示:1、永磁同步电机,2、单片机,3、整流电路,4、逆变器,5、电流传感器,6、位置传感器,7、门极驱动电路,8、通信接口。
具体实施方式
下面结合附图对本发明做进一步的详细说明。
结合附图1、图2,一种产生转子扭转振动的方法,包括永磁同步电机1、单片机2、整流电路3、逆变器4、电流传感器5、位置传感器6、门极驱动电路7,所述整流电路3、逆变器4、电流传感器5依次通过导线电性连接,所述单片机2通过门极驱动电路7与逆变器4电性连接,所述电流传感器5通过位置传感器6与单片机2电性连接,所述电流传感器5与单片机2电性连接,所述单片机2设有通信接口8,所述单片机2通过位置传感器6检测永磁同步电机转子位置,所述单片机2通过电流传感器5检测永磁同步电机相电流,采用矢量控制策略,输出脉宽调制信号,通过逆变器4输出三相交流电驱动永磁同步电机,且控制其交轴电流按正弦规律变化,从而使永磁同步电机输出按正弦规律变化的转矩,从而产生扭转振动,所述单片机2通过通信接口8与外部主机通信,获取扭转振动的频率目标值和幅值目标值,具体包括以下方法:
S1、永磁同步电机交轴输入电压和交轴电流关系为线性,当交轴输入电压为正弦时得到频率相同但幅值和相位不同的交轴电流波形,
S2、控制目标为交轴电流的幅值和频率,频率目标值输入到sin信号发生器,生成一个标准幅值目标频率的正弦信号sin输出值,正弦信号sin输出值与幅值校正系数相乘后,作为交轴电压施加到永磁同步电机上,得到正弦变化的交轴电流,
S3、根据检测到的交轴电流得到此时的交轴电流幅值,将交轴电流幅值目标值与其作差,然后进行PI运算,得到sin幅值校正系数,与正弦信号sin输出值进行相乘后得到sin校正输出值,实现对电流幅值的闭环控制,
S4、所述永磁同步电机产生反电动势时,通过永磁同步电机转速结合永磁同步电机反电势常数进行反电势补偿并增加电流偏置补偿环节,将交轴电流闭环到零,
S5、所述电流幅值的检测,通过一个完整正弦周期内的电流最大值减去最小值后除以2获得。
所述电流偏置补偿包括获取交轴电流的直流偏置,交轴电流的直流偏置通过一个完整正弦周期内的电流最大值加上最小值后除以2获得。
在频率较低时,通过幅值目标值乘以sin输出值,与交轴电流作差后进行PI运算得到幅值校正系数。
在频率较低时,使用增强型锁相环EPLL对交轴电流的幅值进行跟踪,获取交轴电流的幅值,进而计算幅值校正系数。
本发明在具体实施时,永磁同步电机的直轴电流产生磁场,交轴产生转矩,控制交轴电流使其按正弦规律变化即可得到正弦转矩,产生扭转振动;若直接采用交轴电流直接跟踪正弦目标值的方法,交轴电流需要多个控制周期才能达到目标值,在正弦频率较高时,电流幅值不易达到设定值,此方法不利于产生较高频率的扭转振动。永磁同步电机交轴输入电压和交轴电流关系为线性,所以当交轴输入电压为正弦时可以得到频率相同但幅值和相位不同的交轴电流波形。
控制目标为交轴电流的幅值和频率,频率目标值输入到sin信号发生器,生成一个标准幅值目标频率的正弦信号sin输出值,正弦信号sin输出值与幅值校正系数相乘后,作为交轴电压施加到永磁同步电机上,可以得到正弦变化的交轴电流,但是在系统运行过程中,永磁同步电机会被外力拖动旋转,产生反电动势,造成交轴电流直流偏置不为零,因此通过转速检测结合永磁同步电机反电势常数进行反电势补偿。反电势补偿不能完全抵消因永磁同步电机被拖动而产生反电动势造成的交轴电流直流偏置不为零,因此需要检测交轴电流并增加电流偏置补偿环节,将交轴电流闭环到零。根据检测到的交轴电流可以得到此时的交轴电流幅值,将电流幅值目标值与其作差,然后进行PI运算,得到sin幅值校正系数,与正弦信号sin输出值进行相乘后得到sin校正输出值,实现对电流幅值的闭环控制。
电流偏置补偿需要获取交轴电流的直流偏置,交轴电流的直流偏置可以通过一个完整正弦周期内的电流最大值加上最小值后除以2获得。
电流幅值检测可以通过一个完整正弦周期内的电流最大值减去最小值后除以2获得,此方法较为简单,且不受交轴电流直流偏置的影响,但是一个正弦周期只能检测一次,在频率较低时,幅值校正的频率也较低,影响控制效果;因此可以通过幅值目标值乘以sin输出值,与交轴电流作差后进行PI运算得到幅值校正系数;也可使用增强型锁相环EPLL对交轴电流的幅值进行跟踪,获取交轴电流的幅值,进而计算幅值校正系数。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种产生转子扭转振动的装置及其方法
- 一种测量旋转机械转子扭转振动的方法及其装置