单比特随机频控阵雷达目标距离-角度联合估计方法
文献发布时间:2023-06-19 09:46:20
技术领域
本发明属于雷达目标参数估计领域,具体为一种单比特随机频控阵雷达目标距离-角度联合估计方法。
背景技术
在目前的阵列雷达目标参数估计方法中,相控阵雷达在每一扫描快拍内,波束指向在距离向是恒定的,无法同时估计目标的距离和角度。频控阵与相控阵一样发射相参信号,只是在每个阵元发射频率上附加很小的频偏,其发射波束虽然具有距离和角度依赖性,但存在距离向和方位角向耦合的问题,导致目标的距离和角度难以被无模糊地估计。
另外,在数字雷达系统中,模拟信号要先经过采样量化转化为数字信号。传统的雷达信号处理中,采样频率不低于信号带宽两倍,量化器的量化位数也要符合量化精度的要求,这就导致了数据量多,量化器、存储器负担重等问题。
发明内容
本发明的目的在于提供了一种单比特随机频控阵雷达目标距离-角度联合估计方法。
实现本发明目的的技术方案为:一种单比特随机频控阵雷达目标距离-角度联合估计方法,包括:
步骤1:将扫描空间划分为距离-角度联合表示的离散网格;
步骤2:根据雷达回波信号模型和单比特采样原理构建离散网格点上目标的单比特压缩感知测量模型;
步骤3:构建扫描空间任意位置目标的雷达基带回波信号单比特压缩感知测量模型,并对其用泰勒插值法近似表示;
步骤4:使用单比特压缩感知重构算法依次估计目标最邻近网格点、真实距离和角度与最邻近网格点之间的偏差量,得到目标距离和角度的估计值。
优选地,将扫描空间划分为距离-角度联合表示的离散网格具体为:
将扫描空间的距离不模糊范围和角度不模糊范围独立均匀地划分为P和Q个单元,在扫描空间范围中存在PQ个距离角度对,空间被划分为了有PQ个网格点的离散网格,网格点矩阵为ε
优选地,构建的离散网格上信号的单比特压缩感知测量模型具体为:
y=sign(u)
u=Θa+V
式中,Θ∈R
优选地,构建的扫描空间任意位置目标的雷达基带回波信号单比特压缩感知测量模型为:
y=sign(Θ(ε′
式中,Θ(ε′
式中,b(θ,r)=[b
优选地,目标位置矩阵具体为:
ε′
式中,δr=[δr
优选地,将扫描空间任意位置目标的雷达基带回波信号单比特压缩感知测量模型用泰勒插值法近似表示的具体步骤如下:
目标的最邻近网格点矩阵ε
根据最邻近网格点矩阵Θ(ε
对扫描空间任意位置目标的雷达基带回波信号u进行近似表示,将其表示为目标在最邻近网格处产生的回波信号、距离偏差和角度偏差产生的回波信号、噪声三部分之和的形式:
式中,diag(·)表示将括号中元素对角化后的对角矩阵;
对u进行单比特采样得到使用泰勒插值法近似表示后的扫描空间任意目标的雷达基带回波信号的单比特压缩感知测量模型y:
优选地,将近似表示后的扫描空间任意目标的雷达基带回波信号的单比特压缩感知测量模型转化为实数形式,具体过程为:
将复数形式的网格点感知矩阵Θ转化为实数形式的网格点感知矩阵Φ为:
将复数形式的最邻近网格点感知矩阵Θ(ε
复数形式回波幅度向量a转化为实数形式的回波幅度向量x为:
x=Re(a)
复数形式的加性噪声向量V转化为实数形式的加性噪声向量v为:
v=Re(V)
空间任意位置目标的雷达基带回波压缩感知测量模型u转化为实数形式为:
式中,diag(·)表示将括号中元素对角化后的对角矩阵;
设A(ε
使用A(ε
u=Φ(ε
对u进行单比特采样得到泰勒插值法近似表示的扫描空间任意目标的雷达基带回波信号的单比特压缩感知测量模型y的实数形式:
y=sign(Φ(ε
优选地,使用单比特压缩感知重构算法依次估计目标最邻近网格点、真实距离和角度与最邻近网格点之间的偏差量,得到目标距离和角度的估计值的具体过程为:
(1)初始化迭代次数为i=0,最大迭代次数I,稀疏度K;初始化第i次迭代时的回波幅度向量x
(2)通过下式更新x
β
x
式中,η
(3)若||Y-sign(Φx
(4)初始化迭代次数l=0,最大迭代次数L;初始化第l次迭代的距离偏差δr
使用重构的回波幅度向量估计值
使用最邻近网格点矩阵ε
(5)定义第l次迭代时的距离梯度
式中A(ε
式中,
通过下式将δr
(6)如果满足:
或者达到最大迭代次数,输出目标位置矩阵:
本发明与现有技术相比,其显著优点为:本发明通过少量的单比特压缩测量数据得到较高的目标距离和角度估计精度,且具有较低的计算负担和较好的抗噪声性能.
附图说明
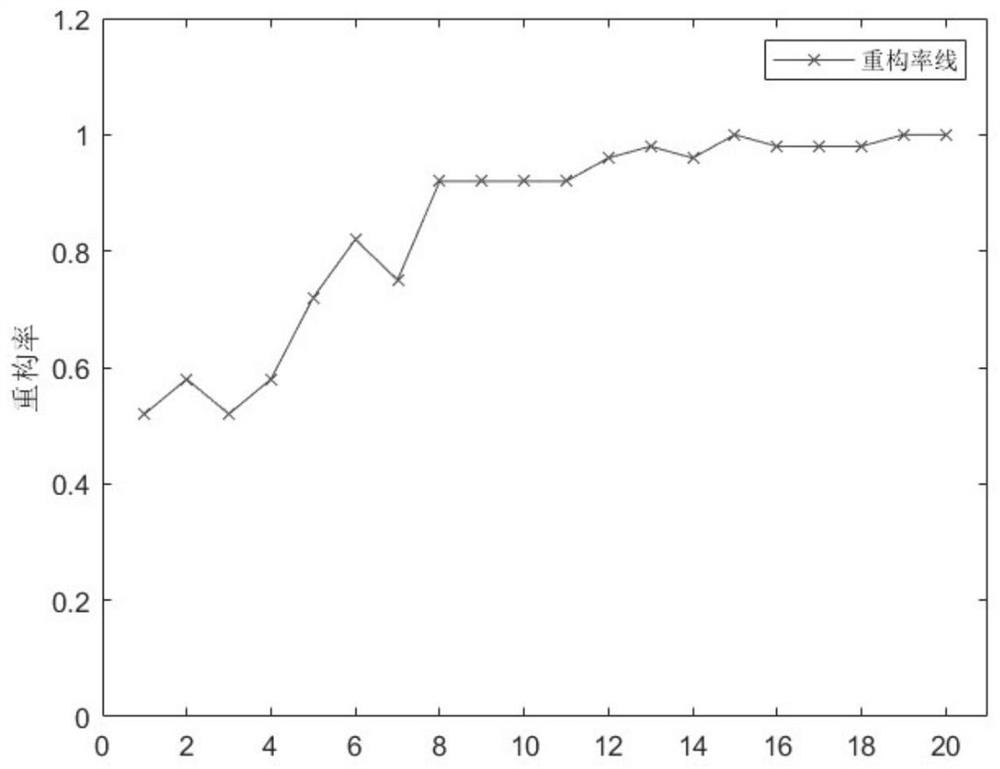
图1为本发明的一个实施例仿真中,不同信噪比下位于网格上的目标参数精确估计重构率曲线图。
图2为本发明的一个实施例仿真中,单比特采样随机频控阵雷达偏离网格目标参数估计结果随信噪比的变化图。
图3为本发明的一个实施例仿真中,单比特采样随机频控阵雷达偏离网格目标参数估计不同信噪比SNR时空间距离相对误差。
具体实施方式
下面结合附图和实施例进一步说明本发明单比特随机频控阵雷达目标距离-角度联合估计方法。
一种单比特随机频控阵雷达目标距离-角度联合估计方法,采用发射附加随机频偏信号的随机频控阵雷达扫描空间,获得单比特采样的回波信号向量;将扫描空间划分为距离-角度联合表示的离散网格;根据雷达基带回波信号模型和单比特采样原理构建网格点上目标的雷达基带回波信号单比特压缩感知测量模型;构建扫描空间任意位置目标的雷达基带回波信号单比特压缩感知测量模型,基于插值法对其进行近似表示;使用单比特压缩感知重构算法依次估计目标最邻近网格点,距离和角度与最邻近网格点之间的偏差量,从而得到目标距离和角度的估计值;具体实施步骤如下:
假设阵列排列方向为x轴正向,具有N个阵列单元且相邻单元间距为d,则第n个阵列单元的坐标为
对于随机频控阵雷达而言,不同阵列单元的载频随机分配,假定f
天线发射信号为单频信号,波形表示为
假设在远场的情况下,存在一个距离为r,角度为θ的目标,所有阵元的基带回波信号归一化之后可以排列成一个导向矢量b(θ,r)=[b
将其推广到多个目标的情况,假设空间中存在K个目标,位置为{r
步骤1:将扫描空间划分为距离-角度联合表示的离散网格;
将扫描空间的距离不模糊范围和角度不模糊范围独立均匀地划分为P和Q个单元,这样扫描空间就被划分成了距离-角度联合表示的离散网格,在扫描空间中存在PQ(P与Q的乘积)个网格点,网格点矩阵为ε
步骤2:构建网格点上目标的雷达基带回波信号单比特压缩感知测量模型;
假设在PQ个网格点上都存在目标,则单一目标产生的导向矢量b(θ
假设扫描空间中仅存在K(K<<PQ)个目标且均位于网格点上,定义PQ×1的回波幅度向量a,其第i项a
雷达基带回波单比特采样信号向量y是雷达基带回波信号向量u单比特采样后的结果,所以对网格点上目标的雷达基带回波信号的压缩感知测量模型u=Θa+V进行单比特采样即可得到网格点上目标的雷达基带回波信号单比特压缩感知测量模型:y=sign(Θa+V);
式中,sign(a)为符号函数,a
步骤3:构建扫描空间任意位置目标的雷达基带回波信号单比特压缩感知测量模型;
实际的测量中,目标不一定会位于网格点的位置,所以当目标位于扫描空间任意位置时,要将网格上目标的雷达基带回波信号单比特压缩感知测量模型y=sign(Θa+V)推广到更一般的形式;
当空间中存在K个目标时,空间中有K个与它们最邻近点的网格点,被称为目标的最邻近网格点;目标的最邻近网格点矩阵为ε
ε′
式中,ε′
根据ε′
由此可得扫描空间任意位置目标的雷达基带回波信号向量u的压缩感知测量模型为u=Θ(ε′
将扫描空间任意位置目标的雷达基带回波信号单比特压缩感知测量模型用泰勒插值法近似表示,具体步骤如下:
首先使用目标的最邻近网格点矩阵ε
然后使用最邻近网格点矩阵Θ(ε
然后对扫描空间任意位置目标的雷达基带回波信号u进行近似表示,将其表示为目标在最邻近网格处产生的回波信号、距离偏差和角度偏差产生的回波信号、噪声三部分之和的形式:
式中diag(·)表示将括号中元素对角化后的对角矩阵。
最后对u进行单比特采样得到使用泰勒插值法近似表示后的扫描空间任意目标的雷达基带回波信号的单比特压缩感知测量模型y:
步骤4:使用单比特压缩感知重构算法依次估计目标最邻近网格点、真实距离和角度与最邻近网格点之间的偏差量,得到目标距离和角度的估计值,具体方法为:
重构算法要求输入的信号形式为实信号,但雷达系统采集的信号均为复信号,所以在代入算法前要过取实部的方法将信号由复数形式通转化为实数形式;复数形式的网格点感知矩阵Θ转化为实数形式的网格点感知矩阵Φ为:
复数形式的最邻近网格点感知矩阵Θ(ε
复数形式回波幅度向量a转化为实数形式的回波幅度向量x为:
x=Re(a)
复数形式的加性噪声向量V转化为实数形式的加性噪声向量v为:
v=Re(V)
空间任意位置目标的雷达基带回波压缩感知测量模型u转化为实数形式为:
式中diag(·)表示将括号中元素对角化后的对角矩阵,设A(ε
使用A(ε
u=Φ(ε
对u进行单比特采样得到泰勒插值法近似表示的扫描空间任意目标的雷达基带回波信号的单比特压缩感知测量模型y的实数形式:
y=sign(Φ(ε
通过之前的步骤得到了扫描空间任意位置目标雷达基带回波信号单比特压缩感知测量模型,本步骤中将使用单比特压缩感知重构算法,主要利用模型中构建的多种感知矩阵对目标距离和角度进行估计。
本步骤的算法主要分为两个部分,第一部分使用单比特压缩感知重构算法中的二进制硬阈值迭代算法(BinaryInterative HardThresholding,BIHT),输入雷达基带回波单比特采样信号向量Y和网格点感知矩阵Φ重构出回波幅度向量估计值
第二部分同样使用BIHT算法,计算出距离偏差δr
具体步骤为:
(1)初始化第一部分迭代次数为i=0,最大迭代次数I,稀疏度K;初始化第i次迭代时的回波幅度向量x
(2)通过下式更新x
β
x
式中,η
(3)若||Y-sign(Φx
(4)初始化第二部分迭代次数l=0,最大迭代次数L;初始化第l次迭代的距离偏差δr=0∈R
使用重构的回波幅度向量估计值
(5)定义第l次迭代时的距离梯度
式中A(ε
上式中
通过下式将δr
(6)如果满足:
或者达到最大迭代次数,输出目标位置矩阵:
从而获得目标的距离和角度估计值;否则将l更新为l+1,返回(5)继续执行。
本发明采用随机频控阵列(Random Frequency Diverse Array,RFDA),即发射随机频偏的频控阵,解决了传统频控阵距离向和方位角向耦合的问题,可以实现精确的目标指示。
本发明对雷达接收的基带回波信号进行单比特量化,利用单比特压缩感知理论的重构算法估计目标参数,从而减少数据总比特数,减少传输和存储时的负担,又可以降低数据采集系统的硬件复杂程度。
本发明在随机频控阵雷达的基础上结合压缩感知的极限形式单比特压缩感知,能够在准确估计参数的基础上大大降低采样速率和系统的复杂度,使系统在数据传输,存储和实时处理上的性能得到了改善。
实施例
通过Matlab仿真,进一步说明本发明单比特正交压缩采样合成孔径雷达成像方法和系统的具体实施方案。
阵元数目N=140,阵元中心频率f
由图1可知,对于网格上目标,当目标信噪比大于0dB时,重构率均在0.5以上,且随信噪比的增大重构率逐渐增大,当目标信噪比大于12dB时,重构率可以达到1,目标参数估计性能非常好。
随着信噪比SNR的增大,空间距离、测角和测距误差逐渐减小,当信噪比SNR大于15dB时,三个误差均较小,空间距离相对误差小于3%,因此总体上看使用基于泰勒插值的BIHT算法来进行偏离网格目标的参数估计性能良好,如图2、3所示。
- 单比特随机频控阵雷达目标距离-角度联合估计方法
- 一种基于模糊函数的频控阵MIMO雷达目标定位方法