三轴气浮卫星仿真平台自动调平方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及一种新型三轴气浮卫星仿真平台自动调平方法,属于仿真非线性控制领域。
背景技术
随着航天事业的飞速发展,对于航天器地面模拟太空的微重力、微阻尼环境等 项实验提出了更高的性能要求。由于航天器在太空中测试与重构极其困难,因此航 天器的地面模拟与测试实验就显得尤为关键。
目前我国已建设有与卫星全物理仿真试验相配套的气浮平台,通过气浮形式来模拟太空中的微重力与微阻尼环境。三轴气浮台通过气浮球轴承可实现三个自由度 的转动,用以模拟三轴姿态动力学与控制仿真。为了在地面测试时可以严格的模拟 微摩擦与微重力的环境,需要尽量克服外部干扰力矩,而其中最大的障碍就是重力 对气浮台造成的影响。为了尽可能的减小重力带来的影响,需要将气浮台的质心与 转动中心的距离调整至最小。气浮台的质心调整可以观察其摆动运动,通过移动调 平质量块,让其摆动周期变长。此类方法的缺点在于需要进行大量的试验,且三轴 台的转动角度受限,在实际应用中难度很大。现阶段通常采取手动调平方式,但仍 需耗费较长实验周期、调整误差也较大。
在实际应用中,气浮台上新增载荷或替换载荷都会对气浮台质心造成很大的影响。现阶段对于三轴气浮平台的调平方法可分为两大类。第一类,假设平台转动惯 量已知的情况下进行自动调平。对于转动惯量小的气浮平台,可以对其主转动惯量 进行精确测量,忽略其惯量积对于系统的影响。而对于转动惯量较大的气浮平台, 则对与转动惯量的测量会比较困难,且测得的惯量积仍具有较大误差,对于转动惯 量较大的气浮平台实用性较差。第二类,用最小二乘法对气浮平台的转动惯量进行 估算。这种方法更加适用于转动惯量较大的气浮平台,但其估算误差,尤其是对于 惯量积的估计误差较大,会很大程度上影响自动调平的精度。
对于三轴气浮平台,若台上载荷发生变更则会对转动惯量造成较大影响。又若 搭载冷气推力器系统,随着冷气的消耗,气瓶质量的变化也会对转动惯量造成影响。 因此,若想进一步提高三轴气浮平台的自动调平精度,需要将平台转动惯量的不确 定性考虑其中。
有鉴于此,特提出本专利申请。
发明内容
本申请所述的三轴气浮卫星仿真平台自动调平方法,在于解决上述现有技术存在的问题而针对搭载了冷气推力器系统的三轴气浮卫星仿真平台,在其转动惯量存 在不确定性的条件下,通过控制三个惯性主轴方向上质量块的运动矢量以实现气浮 平台角速度增量为零、进而实现对平台质心的高精度调整,有效地提高三轴气浮卫 星仿真平台进行地面模拟与测试数据的准确性。
为实现上述设计目的,所述的三轴气浮卫星仿真平台自动调平方法,是调节在 惯性主轴上的质量块位移矢量,以将质量块与平台旋转中心重合、进而以调节气浮 平台的角速度增量为零。
设r=[r
其中,m
则r
本申请所述自动调平方法所需控制的力矩τ
s=ω
在上述公式所得的力矩τ
其中,Φ=1+||ω||+||ω||
综上内容,本申请所述三轴气浮卫星仿真平台自动调平方法具有如下优点:
1、基于本申请,能够无需人为干涉而实现自动、准确的平台重心调平控制,显著地缩短地面模拟与测试周期、节省大量人力物力。
2、能够应对三轴气浮仿真平台转动惯量不确定情况下的重心自动调平,明显提高了 相关模拟实验测试数据的准确性。
3、本申请基于Lyapunov稳定性定理进行设计,所得到控制方法的鲁棒性较强。
4、能够针对存在外部干扰的情况,即在转动惯量不确定和外部干扰共同作用下实现 快速、自动地质心调平,三轴气浮平台的调平效率较高。
附图说明
以下附图是本申请具体实施方式的举例说明。
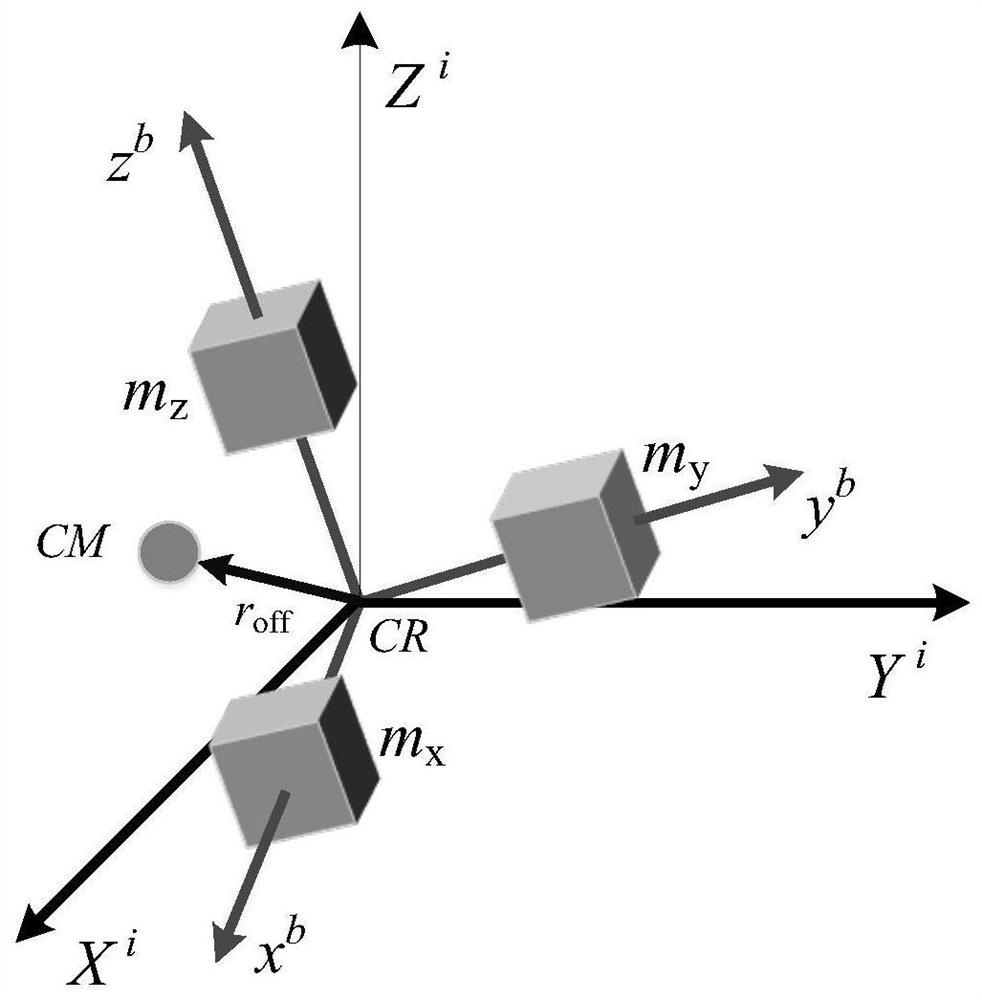
图1是所述三轴气浮卫星仿真平台自动调平方法的原理与坐标示意图;
图2至图4分别是自动调平过程中X、Y和Z轴质量块移动位置的响应曲线图;
图5至图7分别是自动调平过程中X、Y和Z轴角速度的响应曲线图;
图8是自动调平之前和调平之后的动能响应曲线对比图;
在图8中,动能越大说明重心位置与质心位置偏差越大,动能越小说明重心位 置与质心位置偏差越小、即重力不平衡力矩对三轴气浮平台造成的干扰越小。
具体实施方式
下面结合附图对本发明的实施方式作进一步说明。
实施例1,如图1所示,本申请提出的三轴气浮卫星仿真平台自动调平方法,是 针对在三个惯性主轴上的质量块通过如步进电机等直线驱动机构以调节其运动矢 量。即自动调平的手段是,调整质量块位置以使其尽量地与平台旋转中心重合,最 终调节气浮平台的角速度增量为零。而在调节质量块与旋转中心重合的过程中,无 需借助其他执行机构。
具体地,本申请基于气浮平台的角速度,若重力干扰力矩为零,则气浮平台的 角速度不再变化;反之,则会有角速度增量产生。
气浮平台的本体固连坐标系主轴沿主转动惯量方向,坐标系原点在气浮平台转动中心CR,矢量r
三轴气浮卫星仿真平台的运动学与动力学模型,如图1所示的两个坐标系。其 中,X
(一)转动惯量确定的前提下
对三轴气浮卫星仿真平台的质心调平沿惯性主轴进行,则平台的姿态运动学方程由以下四元数表示:
其中,ω=[ω
在重力影响下,三轴气浮卫星仿真平台的运动学方程由以下欧拉方程表示:
Jω&=-ω
其中,m
为实施三轴气浮卫星仿真平台的调平,需将重力矢量转换到本体固连坐标系中,
则,
g
为通过调整质量滑块来调整平台质心,以使平台质心与旋转中心尽量地重合以克服重力带来的干扰力矩,即需将平台姿态调整到Z轴与重力方向不重合的姿态、 再进行调平。如果Z轴与重力方向重合,将使得Z轴方向的调平无法进行。
定义期望姿态误差为(q
q
旋转矩阵由下式给出:
则相对角速度可表达如下:
ω
三轴气浮卫星仿真平台姿态误差运动学与动力学方程如下式:
定义如下滑模变量:
s=ω
其中,β>0,则动力学方程可改写成:
J(·)s&=τ
则,
本申请不关注Δ(·)的构成与具体内容,而是通过寻找Δ(·)的上限从而进一步对 自动调平方法的控制手段进行设计。
本申请是基于角速度信息进行控制的,自动调平方法的目的是通过三个直线直线驱动机构进行质量块位置的调整,以使平台的角速度增量为零。
因此,由直线运动机构产生的力矩可表述如下:
其中,m
在此引用下述公式(3)所示的动力学系统方程式,则有:
闭环系统全局稳定,且系统状态跟踪误差有界,即||q
其中,k
选取如下Lyapunov函数:
因为,
进一步地,
将以下公式(18)中所列控制器代入下述公式(21)中,则得出:
其中,
将下述公式(23)代入公式(22)中可得到:
令
根据以下公式(14)可知,在s与q
基于上述推导过程,本申请所述控制力矩τ
则需将控制力矩τ
τ
由于叉乘矩阵的主对角线元素恒为零,因此矩阵[-g
本申请给出如下r的解:
至此,本申请所述自动调平方法的控制输出量r由公式(28)相应地给出。
(二)转动惯量不确定的前提下
三轴气浮卫星仿真平台的姿态运动学与转动惯量确定时的一致,那么姿态运动学方程可由四元数表示如下:
其中,ω=[ω
在重力影响下运动学方程可由以下欧拉方程表述:
J(·)ω&=-ω
其中,m
为了实现平台进行调平,需将重力矢量转换到本体固连坐标系中:
其中,
g
相应地,定义期望姿态误差为(q
q
旋转矩阵由下式给出:
则相对角速度可表达如下:
ω
姿态误差运动学与动力学方程可以表述如下:
定义如下滑模变量:
s=ω
其中β>0,则动力学方程可改写成:
且
Δ(·)可看作系统不确定项,其由两部分组成:1.系统的非线性项;2.外部干扰项。而对于控制系统设计而言,困难之一就是在动力学系统中存在类似的不确定项。 本申请不关注Δ(·)的构成与具体内容,而是通过寻找Δ(·)的上限从而进一步对控制 系统进行设计。
在考虑外部干扰及重力干扰的前提下,得出如下结论:
1)、存在未知的正常数c
2)、外部干扰力矩T
3)、ω
其中,c
4)、
对于Δ(·)中重力干扰力矩项r
5)、||r
通过上述结论可以得出,尽管Δ(·)中包含非线性项、不确定项及时变项,但仍可保证下式成立
||Δ(·)||≤b
Φ=1+||ω||+||ω||
由此可知,本申请能够适用于存在干扰与转动惯量不确定的情况而实现平台快速、准确地自动调平。
调节质量块沿三个惯性主轴位移的力矩表述如下:
其中,m
如公式(31)所描述的动力学系统,控制力矩如下所示:
在上述控制力矩下,平台调平闭环系统全局稳定,且系统状态跟踪误差有界, 即||q
选取如下Lyapunov函数:
由于
进一步地,
将公式(49)所描述的控制器代入公式(52)中:
其中,
将公式(54)代入式(53)中:
令
根据公式(42)可知,在s与q
如上所述,本申请所述三轴气浮卫星仿真平台自动调平方法,是通过驱动质量 块沿三个惯性主轴的位移以实现平台角速度增量为零。所控制的力矩方向垂直于其 运动方向与重力方向,实际上是通过控制质量块的移动距离r来实现。
为了得到实际控制量,则需要将控制力矩τ
由公式(48)得出
τ
由于叉乘矩阵的主对角线元素恒为零,因此矩阵[-g
给出r的解如下:
至此,本申请所述三轴气浮卫星仿真平台自动调平方法的输出量r由上式(59)给出。
如图2至图8所示,申请人在如下结构的三轴气浮仿真平台上进行了验证。平 台具有三个直线运动机构与三个质量块,质量块由步进电机驱动,最快运动速度可 以达到100mm/s。该平台可以绕Z轴360°自由旋转,其它两轴转动角度为±30°。 平台搭载了三轴高精度光纤陀螺,用于精确测量角速度信息,同时搭载双轴倾角仪, 可以精确测量X轴与Y轴姿态信息,而Z轴姿态信息由陀螺测量的角速度积分获得。
由于调平能力受限于质量块质量与质量块行程,因此在进行自动调平之前需要将平台进行手动调平,当调整到一个较为稳定的状态下,方可进入自动调平过程。
试验参数如下表所示:三轴平台自动调平试验参数
如图2至图4所示,试验中质量块移动位置的响应曲线可以看出,实验中质量块 移动的距离较短。这说明真实的质心偏差完全在自动调平系统的能力范围之内。
如图5至图7所示,试验中角速度的响应曲线可以看出,角速度最终稳定在零点,而系统也在20s内完成了自动调平过程,从试验的角度证明了该方法行之有效。现 设计如下方法进一步证明该调平算法的有效性。在自动调平完成之后,对三轴气浮 平台施加一个任意的角速度,那么三轴台的总能量可以表示为动能与势能之和
E
其中E
如图8所示,
综上内容,结合附图中给出的实施例仅是优选方案。对于所属领域技术人员来 说可以据此得到启示,而直接推导出符合本发明设计构思的其他替代结构,也应属 于本发明所述的方案范围。
- 三轴气浮卫星仿真平台自动调平方法
- 三轴气浮仿真实验平台的质心测量方法