一种转动设备的参数辨识方法和装置
文献发布时间:2023-06-19 10:32:14
技术领域
本发明属于大型机械转动设备系统参数辨识领域,更具体地,涉及一种转动设备的参数辨识方法和装置。
背景技术
无论是在船舶制造业、航空航天工业及军事工业等领域,大型机械转动设备应用都是十分广泛。为保障大型机械转动设备运作的可靠性,在机械结构设计及优化、控制算法研究时都需要对设备的转动惯量、质心位置以及转动阻尼等有准确的了解。在精确识别出转动惯量和质心转矩的情况下,可以通过一系列算法优化设备的结构,以减少偏心率和惯性矩对旋转过程的影响。此外,在系统数学建模过程中,大量未知元素会增加不确定性以及生成精确模型所需的工作量。在提高非线性时变系统的运动精度和稳定性的过程中,利用具有较高识别精度的实时特征参数对系统的控制参数进行自适应校正可以发挥重要作用。
目前主流参数辨识算法主要分为非参数模型辨识方法以及参数模型辨识方法。非参数模型辨识方法获得的模型是非参数模型,主要包括阶跃响应法、脉冲响应法以及频域响应法等。参数模型辨识方法是建立在模型结构完全已知或大体已知基础上,通过极小化模型与过程之间的误差准则函数来确定结构参数,主要包括最小二乘算法、梯度校正法和极大似然法等。
现有的辨识算法在辨识时不变参数或者随时间变化缓慢的参数时具有较高的精度。但是,由于大型转动设备转动速度较快,内部结构变化较大,转动惯量、质心偏载转矩等参数随时间变化较快,应用一般的辨识算法会导致参数辨识收敛性较差,而且辨识精度较低。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种转动设备的参数辨识方法和装置,其目的在于提高参数辨识收敛性和辨识精度,由此解决现有辨识算法会导致参数辨识收敛性较差和辨识精度较低的技术问题。
为实现上述目的,按照本发明的一个方面,提供了一种转动设备的参数辨识方法,包括:
S1:建立所述转动设备在转动过程的运动状态描述方程;
S2:将所述转动设备各参数整个随时间变化过程划分为若干均匀时间区间,基于所述运动状态描述方程采用二次曲线拟合设备参数变化过程并建立最小二乘算法辨识方程;
S3:利用粒子群算法优化参数区间大小,并采用奇异值分解法求解出所述最小二乘算法辨识方程的解,从而得出所述转动设备运动过程中的参数时变值,所述参数时变值包括:运动过程中每个时间点对应的转动惯量J、偏载转矩T
在其中一个实施例中,所述步骤S1包括:
当所述转动设备绕转轴转动时,根据转动定律建立所述运动状态描述方程:
J(t)α=T
其中,T
在其中一个实施例中,所述步骤S2包括:
S201:设定一组PID控制参数,所述转动设备按工况需求转动若干个周期ΔT,借助力传感器及角加速度传感器测量运动过程的驱动力矩和角加度,并对前预设个周期进行采样;
S202:对所述角加速度进行梯形积分求得每个采样点角速度和角度大小,由此将所述运动状态写成:
S203:对一个周期内的时变参数:转动惯量J、偏载转矩T
S204:利用二次曲线(y=k
其中,T
S205:根据所述运动状态描述方程建立运动周期ΔT内最小二乘算法辨识方程Φ×Θ=F。
在其中一个实施例中,所述步骤S204中:
Φ
F
在其中一个实施例中,所述步骤S3包括:
S301:引入机器学习留出法评估方法调节PID控制器参数,获得多组实验数据作为测试集,第i组数据为Group(i):{α
S302:确定优化问题,令
S303:利用粒子群优化算法寻优得出全局最优解G
S304:根据优化出的N
在其中一个实施例中,所述步骤S303包括:
设置粒子群优化的自变量为N
设定适应度函数为
根据下述公式更新每个粒子速度及位置,计算适应值并更新个体最优解P
v
x
其中,v
当达到设定迭代次数M时停止迭代,得出全局最优解G
在其中一个实施例中,所述步骤S304中奇异值分解法为:
按照本发明的另一方面,提供了一种转动设备的参数辨识装置,包括:
建立模块,用于建立所述转动设备在转动过程的运动状态描述方程;
拟合模块,用于将所述转动设备各参数整个随时间变化过程划分为若干均匀时间区间,基于所述运动状态描述方程采用二次曲线拟合设备参数变化过程并建立最小二乘算法辨识方程;
求解模块,用于利用粒子群算法优化参数区间大小,并采用奇异值分解法求解出所述最小二乘算法辨识方程的解,从而得出所述转动设备运动过程中的参数时变值,所述参数时变值包括:运动过程中每个时间点对应的转动惯量J、偏载转矩T
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:所述方法包括:S1:建立所述转动设备在转动过程的运动状态描述方程;S2:将所述转动设备各参数整个随时间变化过程划分为若干均匀时间区间,基于所述运动状态描述方程采用二次曲线拟合设备参数变化过程并建立最小二乘算法辨识方程;S3:利用粒子群算法优化参数区间大小,并采用奇异值分解法求解出所述最小二乘算法辨识方程的解,从而得出所述转动设备运动过程中的参数时变值。通过基于运动状态描述方程采用二次曲线拟合设备参数变化过程并建立最小二乘算法辨识方程,并采用奇异值分解法求解得出所述转动设备运动过程中的参数时变值。本发明提供的方法和装置能够提高参数辨识收敛性、具有辨识精度高,鲁棒性好,应用范围广等优点。
附图说明
图1为本发明一实施例中区间划分方法及二次曲线拟合图;
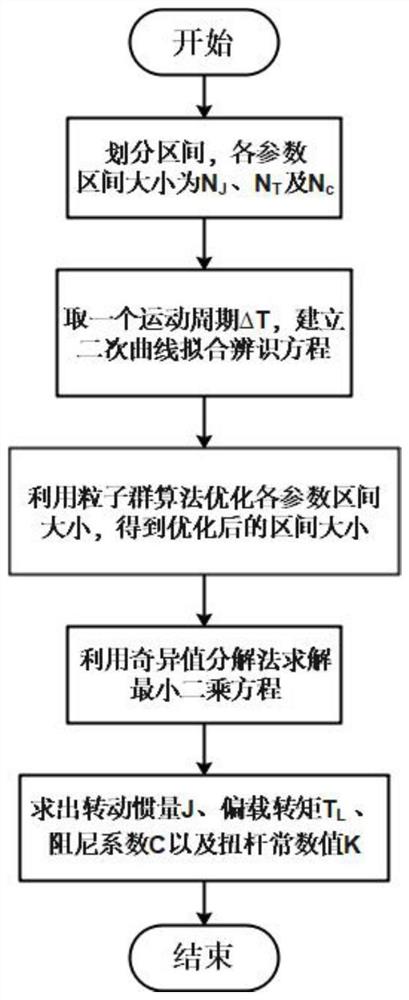
图2为本发明一实施例中转动设备的参数辨识方法的流程图;
图3为本发明一实施例中粒子群区间优化方法的流程图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
本发明提供一种转动设备的参数辨识方法,包括:S1:建立转动设备在转动过程的运动状态描述方程;S2:将转动设备各参数整个随时间变化过程划分为若干均匀时间区间,基于运动状态描述方程采用二次曲线拟合设备参数变化过程并建立最小二乘算法辨识方程;S3:利用粒子群算法优化参数区间大小,并采用奇异值分解法求解出最小二乘算法辨识方程的解,从而得出转动设备运动过程中的参数时变值,参数时变值包括:运动过程中每个时间点对应的转动惯量J、偏载转矩T
在其中一个实施例中,步骤S1包括:
当转动设备绕转轴转动时,根据转动定律建立运动状态描述方程:
J(t)α=T
其中,T
在其中一个实施例中,步骤S2包括:
S201:设定一组PID控制参数,转动设备按工况需求转动若干个周期ΔT,借助力传感器及角加速度传感器测量运动过程的驱动力矩和角加度,并对前预设个周期进行采样;
S202:对角加速度进行梯形积分求得每个采样点角速度和角度大小,由此将运动状态写成:
S203:对一个周期内的时变参数:转动惯量J、偏载转矩T
S204:利用二次曲线(y=k
其中,T
S205:根据运动状态描述方程建立运动周期ΔT内最小二乘算法辨识方程Φ×Θ=F。
如图1所示,区间划分方法具体为:
第一步:调定PID参数并试验后,对前两个周期进行采样,采样间隔为0.0001s,单个周期采样点总数为
第二步:对角加速度进行梯形积分,求得每个采样点角速度、角度大小,由此转动方程可写成(Δt=0.0001):
第三步:对一个周期内的时变参数:转动惯量J、偏载转矩T
考虑到各参数随时间变化规律不一致,故区间大小可不等;
N
用二次曲线(y=k
其中,T
如图2所示,区间划分后,转动设备参数的辨识方法具体为:
(1)根据转动方程,建立一个运动周期ΔT内最小二乘算法辨识方程Φ×Θ=F,其中,
矩阵Φ主要由Φ
Φ
矩阵Θ表示为:
矩阵F
(2)利用粒子群算法优化各参数区间大小,得到优化后的区间大小,为
(3)根据优化出的
其中,∑是由Φ的奇异值组成的对角矩阵.U和V是Φ的左右奇异向量,利用奇异值分解后的矩阵求解最小二乘辨识方程,得到估计值
如图3所示,粒子群区间优化方法具体为:
(1)确定粒子群优化算法的适应度函数fitness,具体为:
第一步,引入机器学习留出法评估方法,调节PID控制器参数,另外获得9组实验数据作为测试集,第i组数据为Group(i):{α
第二步,令
E
第三步,寻得估计值
即
第三步,确定
(2)粒子群优化的自变量为N
(3)计算本次迭代每个粒子的适应值作为个体最优解P
(4)根据下述公式更新每个粒子速度及位置,计算适应值并更新个体最优解P
v
x
其中,v
(5)达到设定迭代次数M时,停止迭代,得出全局最优解G
本发明一种转动设备的参数辨识装置,包括:建立模块,用于建立转动设备在转动过程的运动状态描述方程;拟合模块,用于将转动设备各参数整个随时间变化过程划分为若干均匀时间区间,基于运动状态描述方程采用二次曲线拟合设备参数变化过程并建立最小二乘算法辨识方程;求解模块,用于利用粒子群算法优化参数区间大小,并采用奇异值分解法求解出最小二乘算法辨识方程的解,从而得出转动设备运动过程中的参数时变值,参数时变值包括:运动过程中每个时间点对应的转动惯量J、偏载转矩T
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种转动设备的参数辨识方法和装置
- 一种侧偏刚度、转动惯量参数联合辨识方法及系统