一种海上声学相位中心校准方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及海洋测绘领域。
背景技术
声学定位是海洋大地测量中不可或缺的技术,声学相位中心校准技术则是声学高精度定位的基础。声学相位中心校准的现有方法是通过水池实验对各基元声学相位中心之间直线距离的测量实现的。但在具体应用的过程中,声学基阵安装偏差的海上校准实验,需要事先进行水池实验校准声学基阵声学相位中心,存在实验耗时长且效率低的缺陷,且现有技术中不存在直接在海上对声学相位中心进行校准的方法,因此以上问题亟需解决。
发明内容
本发明目的是为了解决现有声学相位中心校准方法,需要事先进行水池实验校准声学基阵声学相位中心,存在实验耗时长且效率低的缺陷的问题,本发明提供了一种海上声学相位中心校准方法。
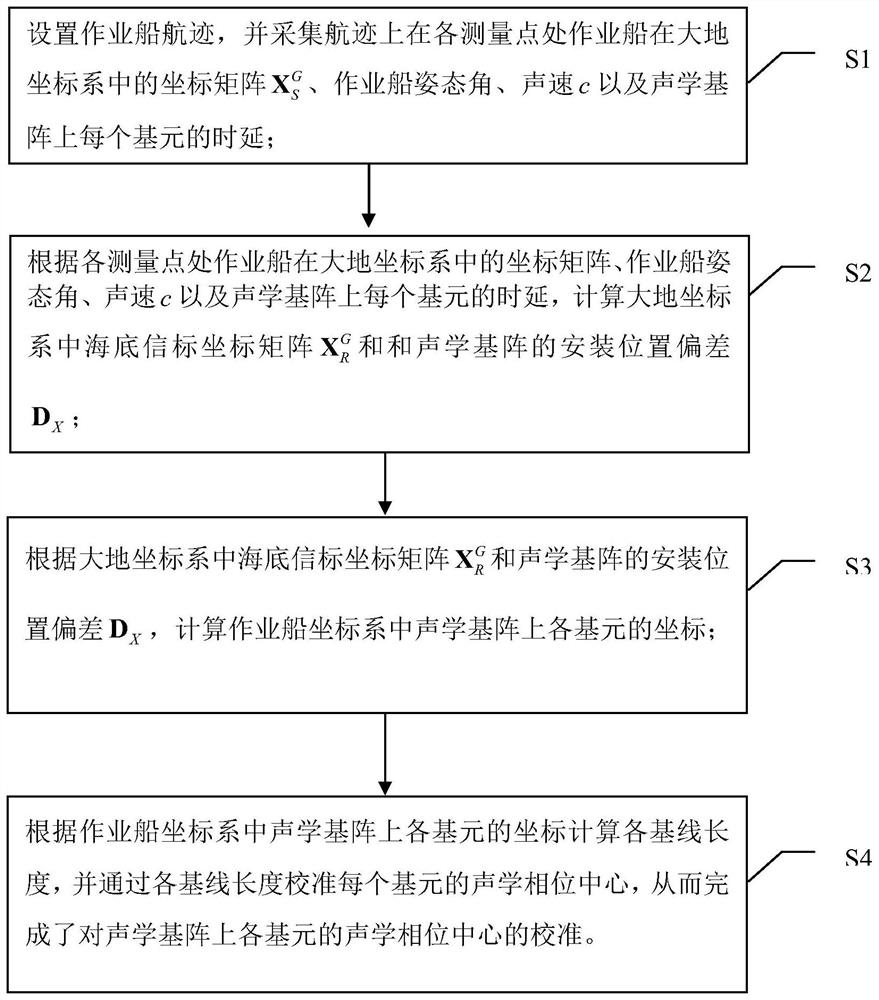
一种海上声学相位中心校准方法,该方法包括如下步骤:
S1、使装载卫星导航系统和声学测量系统的作业船按预设航迹围绕海底信标航行,并采集航迹上在各测量点处作业船在大地坐标系中的坐标矩阵
所述基元的时延为海底信标所发射的声信号到该基元所接收该声信号这个过程所用的时间;
S2、根据步骤S1获得的各测量点处作业船在大地坐标系中的坐标矩阵、作业船姿态角、声速c以及声学基阵上每个基元的时延,计算大地坐标系中海底信标坐标矩阵
S3、根据步骤S2中获得的大地坐标系中海底信标坐标矩阵
S4、根据步骤S3中获得的作业船坐标系中声学基阵上各基元的坐标计算各基线长度,并通过各基线长度校准每个基元的声学相位中心,从而完成了对声学基阵上各基元的声学相位中心的校准;
其中,基线长度为任意两个基元的声学中心间的直线距离。
优选的是,作业船在大地坐标系中的坐标矩阵通过作业船上装载的卫星导航系统获得的;
作业船姿态角是利用姿态传感器获得的;
声速是通过声速剖面仪测量得到;
声学基阵上每个基元的时延是通过声学基阵测量得到。
优选的是,步骤S1中航迹为以海底信标在水面投影点为中心,作业船以水面投影点为中心围绕该水面投影点成对称的田字格形航迹航行,水面投影点为田字格形的中心;
所述田字格形航迹的外轮廓边长为海底信标入水深度的2倍;
海底信标的入水深度为海底信标的声学换能器与海平面间的垂直距离。
优选的是,步骤S2中、根据步骤S1获得的各测量点处作业船在大地坐标系中的坐标矩阵、作业船姿态角、声速以及声学基阵上每个基元的时延,计算大地坐标系中海底信标坐标矩阵和声学基阵的安装位置偏差的实现方式包括:
S21、根据声学基阵上每个基元的时延获得声学基阵的时延t,其中,声学基阵的时延为该声学基阵上所有基元的时延的平均值;同时,还根据作业船姿态角来获得船坐标系到大地坐标系的旋转矩阵R
S22、建立大地坐标系中的观测方程;
S23、将t和R
优选的是,步骤S22中、大地坐标系中的观测方程的表达式为:
优选的是,步骤S3中、根据步骤S2中获得的大地坐标系中海底信标坐标矩阵
步骤S31、首先利用坐标转换方程,将大地坐标系中海底信标坐标矩阵
步骤S32、建立作业船坐标系中的观测方程;
步骤S33、将作业船坐标系中海底信标坐标矩阵
优选的是,步骤S32中,作业船坐标系中的观测方程为:
其中,
τ
i≥4。
优选的是,步骤S4中、根据步骤S4中通过各基线长度校准每个基元的声学相位中心,从而完成了对声学基阵上各基元的声学相位中心的校准的实现方式包括:
首先、在声学基阵上任意选择3个基元坐标构成平面,来建立基阵空间坐标系,3个基元构成的平面为基阵空间坐标系中的x轴和y轴所构成的平面,基阵空间坐标系为左手坐标系;
其次、通过基线长度求解基阵空间坐标系中剩余的基元坐标;确定基阵空间坐标系中各基元坐标后,平移基阵空间坐标系中各基元,使平移后的各基元构成的多边形几何中心与基阵空间坐标系的原点重合,从而获得在基阵空间坐标系下平移后的各基元坐标,该在基阵空间坐标系下平移后的各基元坐标作为校准后的各基元坐标,从而实现对基元声学相位中心的校准。
本发明的有益效果是:本发明通过声学测量手段对基元声学相位中心进行校准,实现了对基元声学相位中心的精确标定,克服了机械加工得到的各基元几何中心与实际基元的声学相位中心之间的系统误差;对于外场声学基阵安装偏差校准,本发明无需事先进行水池实验校准基阵基元声学相位中心,缩短了实验耗时、提高了实验效率。
本发明填补了在海上直接对基元声学相位中心进行校准的空白,使其在海上可直接对基元声学相位中心进行校准,无需额外进行水池实验校准基阵基元声学相位中心,简化校准流程、校准过程效率高。
附图说明
图1是本发明所述的一种海上声学相位中心校准方法的流程图;
图2是作业船、声学基阵和海底信标之间的相对位置关系图的结构示意图;
图3是田字格形航迹的示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
参见图1和图2说明本实施方式,本实施方式所述的一种海上声学相位中心校准方法,该方法包括如下步骤:
S1、使装载卫星导航系统和声学测量系统的作业船按预设航迹围绕海底信标航行,并采集航迹上在各测量点处作业船在大地坐标系中的坐标矩阵
所述基元的时延为海底信标所发射的声信号到该基元所接收该声信号这个过程所用的时间;
S2、根据步骤S1获得的各测量点处作业船在大地坐标系中的坐标矩阵、作业船姿态角、声速c以及声学基阵上每个基元的时延,计算大地坐标系中海底信标坐标矩阵
S3、根据步骤S2中获得的大地坐标系中海底信标坐标矩阵
S4、根据步骤S3中获得的作业船坐标系中声学基阵上各基元的坐标计算各基线长度,并通过各基线长度校准每个基元的声学相位中心,从而完成了对声学基阵上各基元的声学相位中心的校准;
其中,基线长度为任意两个基元的声学中心间的直线距离。
具体应用时,声学基阵设置在水中,海底信标先发出信号,作业船按预设航迹围绕海底信标航行,并采集航迹上在各测量点处的数据,其中,航迹上在各测量点处的数据包括作业船在大地坐标系中的坐标矩阵
通过本发明所述的一种海上声学相位中心校准方法,实现了对声学基阵上基元声学相位中心的精确标定,克服了机械加工得到的各基元几何中心与实际基元的声学相位中心之间的系统误差,提高了声学测量系统的工作性能;对于外场声学基阵安装偏差校准,本发明无需事先进行水池实验校准基阵基元声学相位中心,缩短了实验耗时、提高了实验效率。
本实施方式中的声学测量系统和海底信标均可采用现有技术实现,其声学测量系统包括声学基阵、信号处理箱、电源箱以及显控设备。海底信标可包括耐压换能器、耐压壳体、电子舱、电池舱和声学释放器。
进一步的,作业船在大地坐标系中的坐标矩阵通过作业船上装载的卫星导航系统获得的;
作业船姿态角是利用姿态传感器获得的;
声速是通过声速剖面仪测量得到;
声学基阵上每个基元的时延是通过声学基阵测量得到。
更进一步的,具体参见图3,步骤S1中航迹为以海底信标在水面投影点为中心,作业船以水面投影点为中心围绕该水面投影点成对称的田字格形航迹航行,水面投影点为田字格形的中心;
所述田字格形航迹的外轮廓边长为海底信标入水深度的2倍;
海底信标的入水深度为海底信标的声学换能器与海平面间的垂直距离。
更进一步的,步骤S2中、根据步骤S1获得的各测量点处作业船在大地坐标系中的坐标矩阵、作业船姿态角、声速以及声学基阵上每个基元的时延,计算大地坐标系中海底信标坐标矩阵和声学基阵的安装位置偏差的实现方式包括:
S21、根据声学基阵上每个基元的时延获得声学基阵的时延t,其中,声学基阵的时延为该声学基阵上所有基元的时延的平均值;同时,还根据作业船姿态角来获得船坐标系到大地坐标系的旋转矩阵R
S22、建立大地坐标系中的观测方程;
S23、将t和R
更进一步的,S22中、大地坐标系中的观测方程的表达式为:
更进一步的,步骤S3中、根据步骤S2中获得的大地坐标系中海底信标坐标矩阵
步骤S31、首先利用坐标转换方程,将大地坐标系中海底信标坐标矩阵
步骤S32、建立作业船坐标系中的观测方程;
步骤S33、将作业船坐标系中海底信标坐标矩阵
更进一步的,步骤S32中,作业船坐标系中的观测方程为:
其中,
τ
i≥4。
更进一步的,步骤S4中、根据步骤S4中通过各基线长度校准每个基元的声学相位中心,从而完成了对声学基阵上各基元的声学相位中心的校准的实现方式包括:
首先、在声学基阵上任意选择3个基元坐标构成平面,来建立基阵空间坐标系,3个基元构成的平面为基阵空间坐标系中的x轴和y轴所构成的平面,基阵空间坐标系为左手坐标系;
其次、通过基线长度求解基阵空间坐标系中剩余的基元坐标;确定基阵空间坐标系中各基元坐标后,平移基阵空间坐标系中各基元,使平移后的各基元构成的多边形几何中心与基阵空间坐标系的原点重合,从而获得在基阵空间坐标系下平移后的各基元坐标,该在基阵空间坐标系下平移后的各基元坐标作为校准后的各基元坐标,从而实现对基元声学相位中心的校准。
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
- 一种海上声学相位中心校准方法
- 一种基于声学暗室的声学相位中心校准方法及系统