一种用于甘蔗横向种植的开沟自动控制装置及其控制方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及甘蔗种植技术领域,特别涉及一种用于甘蔗横向种植的开沟自动控制装置及其控制方法。
背景技术
甘蔗作为我国制糖的主要原料,对国家糖业市场的供给安全起着至关重要的作用。甘蔗种植全程机械化为国产种植机的重点发展方向之一。目前甘蔗种植开沟系统多为固定式的开沟系统,也有采用双臂控制的开沟系统,但都是手动控制,田间作业对机手的操作熟练程度要求极高,很难达到控制要求,在作业的过程中,更加难以针对地形进行实时的深度调节,也难以针对行进速度和深度实时调节旋耕转速,导致种植深度和切土节距无法满足要求。因此研究一种用于甘蔗横向种植的开沟自动控制装置其控制方法是非常有必要的。
发明内容
本发明的目的在于提供一种用于甘蔗横向种植的开沟自动控制装置及其控制方法,从而克服现有开沟装置无法根据地形实时调节开沟深度和切土节距的缺点。
为实现上述目的,本发明提供了一种用于甘蔗横向种植的开沟自动控制装置,包括车架;开沟装置,其包括上摆臂、下摆臂、旋耕组件以及后犁,所述上摆臂的前端以能够上下摆动的方式与所述车架的底部铰接,且所述上摆臂的顶部与所述车架之间铰接有上臂液压缸;所述下摆臂的上端以能够前后摆动的方式与所述上摆臂的后端铰接,且所述上摆臂的底部与所述下摆臂的前侧之间铰接有下臂液压缸;所述旋耕组件以能够转动的方式安装于所述下摆臂的下端,且所述旋耕组件通过液压马达驱动进行转动;所述后犁安装于所述下摆臂的下端且位于所述旋耕组件的后方;测试系统,其包括测距传感器、上臂位移传感器、下臂角度传感器以及速度传感器,所述测距传感器安装于所述车架的下方且位于所述开沟装置的前方,用于采集所述车架与甘蔗种植地之间的距离;所述上臂位移传感安装于所述上臂液压缸上,用于采集所述液压缸的伸长量;所述下臂角度传感器安装于所述下摆臂上,用于采集所述下摆臂相对于地平线的角度;所述速度传感器安装于所述车架上,用于测量所述车架的行驶速度;液压系统,其安装于所述车架上,用于控制所述上臂液压缸、所述下臂液压缸以及所述液压马达的工作;以及控制器,其设置于所述车架上,所述测试系统的所述测距传感器、所述上臂位移传感器、所述下臂角度传感器、所述速度传感器和所述液压系统均与所述控制器数据连接,所述控制器能够接收所述测试系统实时采集的信息,并根据所述测试系统实时采集的信息控制所述液压系统的工作。
优选地,上述技术方案中,所述测试系统还包括上臂压力传感器和下臂压力传感器,所述上臂压力传感器安装于所述上臂液压缸的进油口处,用于采集所述上臂液压缸的负载压力;所述下臂压力传感器安装于所述下臂液压缸的进油口上,用于采集所述下臂液压缸的负载压力;其中,所述上臂压力传感器和所述下臂压力传感器均与所述控制器数据连接。
优选地,上述技术方案中,所述液压系统包括:油箱;液压泵,其进油口与所述油箱连接;溢流阀,其进油口与所述液压泵的出油口连接,该溢流阀的出油口与所述油箱连接;第一分流阀,其进油口与所述液压泵的出油口连接;第二分流阀,其进油口与所述第一分流阀的第一出油口连接;上臂电磁换向阀,其进油口与所述第二分流阀的第一出油口连接,该上臂电磁换向阀的工作油口通过上臂锁紧回路与所述上臂液压缸的进油口和出油口连接;下臂电磁换向阀,其进油口与所述第二分流阀的第二出油口连接,该下臂电磁换向阀的工作油口通过下臂锁紧回路与所述下臂液压缸的进油口和出油口连接;节流阀,其进油口分别与所述上臂电磁换向阀的回油口和所述下臂电磁换向阀的回油口连接,该节流阀的出油口与所述油箱连接;以及电液比例流量阀,其进油口与所述第一分流阀的第二出油口连接,工作油口与所述液压马达连接;且所述电液比例流量阀的回油口与所述油箱连接;其中,所述液压泵、所述上臂电磁换向阀、所述下臂电磁换向阀以及所述电液比例流量阀均与所述控制器数据连接。
优选地,上述技术方案中,所述液压系统还包括过滤器,所述过滤器的进油口与所述油箱连接,所述过滤器的出油口与所述液压泵的进油口连接。
优选地,上述技术方案中,所述开沟装置还包括前犁,所述前犁安装于所述下摆臂的下端且位于所述旋耕组件的前方。
一种用于甘蔗横向种植的开沟自动控制装置的控制方法,包括以下步骤:
1)预先在待开沟的甘蔗种植地上进行数据采集,采集土壤硬度和湿度数据,根据土壤硬度和湿度数据确定开沟装置开挖所需的开沟深度和切土节距;并根据所需开沟深度,确定车架和地面的距离数据与上臂液压缸的伸缩数据的关系;根据所需切土节距,确定车架的速度数据与液压马达的转速数据的关系;
2)完成数据采集后,在进行开沟作业前,将步骤(1)中确定的数据关系输入控制器内;接着在控制器内设置下臂角度传感器的角度为90°;
3)最后进行开沟作业,在进行开沟作业的过程中,控制器能够获取测距传感器、上臂位移传感器、下臂角度传感器以及速度传感器实时采集的数据,并将这些采集的数据与步骤(2)中控制器内预先设定好的数据进行对比,使控制器实时控制上臂液压缸的伸长量、下臂液压缸伸长量和液压马达的转速,从而使实际开沟深度等于所需开沟深度,实际切土节距等于所需切土节距,直至完成整个开沟工作。
优选地,上述技术方案中,测试系统还包括上臂压力传感器和下臂压力传感器,上臂液压缸的进油口处设有上臂压力传感器,下臂液压缸的进油口设有下臂液压传感器,在步骤(3)前,在控制器内预先设定好上臂液压缸的最大负载压力和下臂液压缸的最大负载压力。
与现有技术相比,本发明具有如下有益效果:
1.采用本发明的控制装置能够采用多种传感器实时采集开沟装置的工作信息,并将开沟装置的工作信息发送给控制器,以使控制器能够根据传感器反馈回来的工作信息实时控制开沟装置的工作状态,适用不同的地形,从而使实际开沟深度等于所需开沟深度,实际切土节距等于所需切土节距,结构简单,实用性强,自动化程度高。
2.采用本发明的控制方法,在进行开沟作业前,能够预先在甘蔗种植地上进行数据采集,以适用于不同硬度和湿度的甘蔗种植地,提高开沟质量;且在进行开沟时,能够自动调节,适应不同的地形。
附图说明
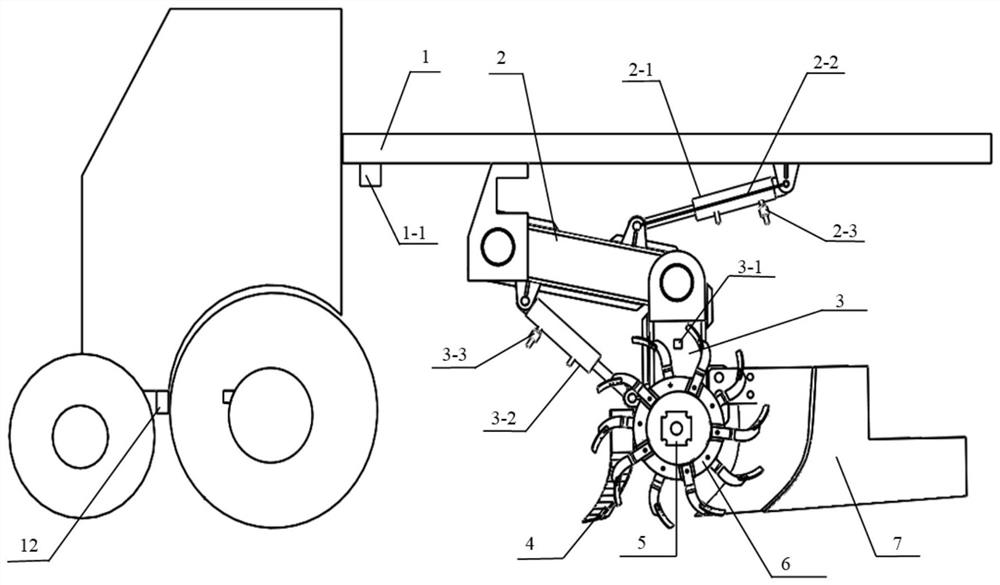
图1是根据本发明的用于甘蔗横向种植的开沟自动控制装置的结构示意图。
图2是根据本发明的液压系统的原理图。
图3是根据本发明的开沟装置的控制原理流程图。
主要附图标记说明:
1-车架,2-上摆臂,3-下摆臂,4-前犁,5-液压马达,6-旋耕组件,7-后犁,1-1-测距传感器,2-1-上臂液压缸,2-2-上臂位移传感器,2-3-上臂压力传感器,2-4-上臂电磁换向阀,2-5-上臂锁紧回路,3-1-下臂角度传感器,3-2-下臂液压缸,3-3-下臂压力传感器,3-4-下臂电磁换向阀,3-5-下臂锁紧回路,5-1-电液比例流量阀,8-第一分流阀,9-溢流阀,10-液压泵,11-过滤器,12-速度传感器,13-第二分流阀,14-节流阀。
具体实施方式
下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
图1至图3显示了根据本发明优选实施方式的一种用于甘蔗横向种植的开沟自动控制装置的结构示意图,该控制装置包括车架1、开沟装置、测试系统、液压系统以及控制器。
参考图1,开沟装置包括上摆臂2、下摆臂3、旋耕组件6以及后犁7,上摆臂2的前端以能够上下摆动的方式与车架1的底部铰接,且上摆臂2的顶部与车架1之间铰接有上臂液压缸2-1,通过驱动上臂液压缸2-1伸缩,从而调节上摆臂2上下摆动的高度。下摆臂3的上端以能够前后摆动的方式与上摆臂2的后端铰接,且上摆臂2的底部与下摆臂3的前侧之间铰接有下臂液压缸3-2,通过驱动上臂液压缸2-1的伸缩,从而调节下摆臂3相对于地平线的角度。旋耕组件6以能够转动的方式安装于下摆臂3的下端,且旋耕组件6通过液压马达5驱动进行转动,其中,旋耕组件6包括转轴和旋耕刀盘,转轴转动安装于下摆臂3的下端,旋耕刀盘固定安装于转轴上,液压马达5与旋耕组件6的转轴连接。后犁7安装于下摆臂3的下端且位于旋耕组件6的后方,用于开挖种植沟。优选地,开沟装置还包括前犁4,前犁4安装于下摆臂3的下端且位于旋耕组件6的前方,以提高开沟质量。
参考图1和图2,测试系统包括测距传感器1-1、上臂位移传感器2-2、下臂角度传感器3-1以及速度传感器12,测距传感器1-1安装于车架1的下方且位于开沟装置的前方,用于采集车架1与甘蔗种植地之间的距离。上臂位移传感安装于上臂液压缸2-1上,用于采集上臂液压缸2-1的伸长量。下臂角度传感器3-1安装于下摆臂3上,用于采集下摆臂3相对于地平线的角度。速度传感器12安装于车架1上,用于测量车架1的行驶速度。通过测距传感器1-1、上臂位移传感器2-2、下臂角度传感器3-1和速度传感器12,能够实时采集开沟装置的工作信息。优选地,测试系统还包括上臂压力传感器2-3和下臂压力传感器3-3,上臂压力传感器2-3安装于上臂液压缸2-1的进油口处,用于采集上臂液压缸2-1的负载压力;下臂压力传感器3-3安装于下臂液压缸3-2的进油口上,用于采集下臂液压缸3-2的负载压力,能够避免上臂液压缸2-1和下臂液压缸3-2的工作负载力超过其最大负载压力,从而避免损坏液压缸。
参考图1至图3,液压系统安装于车架1上,用于控制上臂液压缸2-1、下臂液压缸3-2以及液压马达5的工作。优选地,液压系统包括油箱、液压泵10、溢流阀9、第一分流阀8、第二分流阀13、上臂电磁换向阀2-4、下臂电磁换向阀3-4、节流阀14以及电液比例流量阀5-1。液压泵10的进油口与油箱连接,用于给液压系统提供动力。溢流阀9的进油口与液压泵10的出油口连接,溢流阀9的出油口与油箱连接,用于保证整个液压系统的安全。第一分流阀8的进油口与液压泵10的出油口连接;第二分流阀13的进油口与第一分流阀8的第一出油口连接;上臂电磁换向阀2-4的进油口与第二分流阀13的第一出油口连接,上臂电磁换向阀2-4的工作油口通过上臂锁紧回路2-5与上臂液压缸2-1的进油口和出油口连接,通过上臂电磁换向阀2-4驱动上臂液压缸2-1伸长或收缩。下臂电磁换向阀3-4的进油口与第二分流阀13的第二出油口连接,下臂电磁换向阀3-4的工作油口通过下臂锁紧回路3-5与下臂液压缸3-2的进油口和出油口连接,通过下臂电磁换向阀3-4驱动下臂液压缸3-2伸长或收缩。节流阀14的进油口分别与上臂电磁换向阀2-4的回油口和下臂电磁换向阀3-4的回油口连接,节流阀14的出油口与油箱连接,调节节流阀14的阀口大小,能够调整两个液压缸的伸缩速度。电液比例流量阀5-1的进油口与第一分流阀8的第二出油口连接,电液比例流量阀5-1的工作油口与液压马达5连接;且电液比例流量阀5-1的回油口与油箱连接,通过电液比例流量阀5-1调节液压马达5的转速。优选地,液压系统还包括过滤器11,过滤器11的进油口与油箱连接,过滤器11的出油口与液压泵10的进油口连接,能够过滤油箱的液压油,从而保证液压系统能够正常工作。
参考图1至图3,控制器设置于车架1上,测试系统的测距传感器1-1、上臂位移传感器2-2、下臂角度传感器3-1、速度传感器12、上臂压力传感器2-3和下臂压力传感器3-3、以及液压系统的液压泵10、上臂电磁换向阀2-4、下臂电磁换向阀3-4和电液比例流量阀5-1均与控制器数据连接。其中,该数据连接为有线连接或无线连接,只要能够传输数据即可。控制器能够接收测试系统实时采集的信息,即控制器能够实时接收测试系统采集到的车架1与地面的距离、上臂液压缸2-1的伸长量、下摆臂3与地平线的夹角、车架1的行驶速度、上臂液压缸2-1的负载压力和下臂液压缸3-2的负载压力等信息,并根据测试系统实时采集的信息控制液压系统的工作,即控制液压系统的液压泵10、上臂电磁换向阀2-4、下臂电磁换向阀3-4和电液比例流量阀5-1的工作。采用本发明的控制装置能够采用多种传感器实时采集开沟装置的工作信息,并将开沟装置的工作信息发送给控制器,以使控制器能够根据传感器反馈回来的工作信息实时控制开沟装置的工作状态,从而使开沟装置实际的开沟深度和切土节距能够达到需求,适用于不同的地形,结构简单,实用性强,自动化程度高
参考图1至图3,一种用于甘蔗横向种植的开沟自动控制装置的控制方法,包括以下步骤:
1)预先在待开沟的甘蔗种植地上进行数据采集,采集土壤硬度和湿度数据,根据土壤硬度和湿度数据确定开沟装置开挖所需的开沟深度和切土节距,并根据所需开沟深度,确定车架1和地面的距离数据与上臂液压缸2-1的伸缩数据的关系;根据所需切土节距,确定车架1的速度数据与液压马达5的转速数据的关系。
2)完成数据采集后,在进行开沟作业前,将步骤(1)中确定的数据关系输入控制器内,从而使种植沟的深度保持一致,不受地形的影响。接着在控制器内设置下臂角度传感器3-1的角度为90°,以使下摆臂3能够与地平线垂直,提高旋耕装置的工作质量。且在控制器内预先设定好上臂液压缸2-1的最大负载压力和下臂液压缸3-2的最大负载压力。
3)最后进行开沟作业,在进行开沟作业的过程中,控制器能够获取测距传感器1-1、上臂位移传感器2-2、下臂角度传感器3-1、速度传感器12、上臂压力传感器2-3和下臂压力传感器3-3实时采集的数据,并将这些实时采集的数据与步骤(2)中控制器内预先设定好的数据进行对比,使控制器能够实时控制上臂液压缸2-1的伸长量、下臂液压缸3-2伸长量和液压马达5的转速,从而使实际开沟深度等于所需开沟深度,实际切土节距等于所需切土节距,直至完成整个开沟工作。例如,当测距传感器1-1检测到车架1与地面间的距离增大时,控制器通过上臂电磁换向阀2-4控制上臂液压缸2-1的伸长,当上臂位移传感器2-2检测到上臂液压缸2-1的伸长量满足要求时,控制器控制停止上臂液压缸2-1的伸缩,保证实际开沟深度等于所需开沟深度,同时下臂角度传感器3-1检测到下摆臂3与地平线间的夹角大于或小于90°,控制器通过下臂电磁换向阀3-4控制下臂液压缸3-2的伸缩,直至下摆臂3与地平线之间的夹角等于90°;当测距传感器1-1检测到车架1与地面间的距离减小时,控制器通过上臂电磁换向阀2-4控制上臂液压缸2-1的收缩,当上臂位移传感器2-2检测到上臂液压缸2-1的收缩量满足要求时,控制器控制停止上臂液压缸2-1的伸缩,保证实际开沟深度等于所需开沟深度,同时下臂角度传感器3-1检测到下摆臂3与地平线间的夹角大于或小于90°,控制器通过下臂电磁换向阀3-4控制下臂液压缸3-2的伸缩,直至下摆臂3与地平线之间的夹角等于90°;当速度传感器12检测到车架1的行驶速度增大时,控制器通过电液比例流量阀5-1增大液压马达5的转速,保证实际切土节距等于所需切土节距;当速度传感器12检测到车架1的行驶速度减小时,控制器通过电液比例流量阀5-1减小液压马达5的转速,保证实际切土节距等于所需切土节距;当上臂压力传感器2-3检测到的上臂液压缸2-1的负载压力大于其最大负载压力,和/或下臂压力传感器3-3检测到的下臂液压缸3-2的负载压力大于其最大负载压力时,控制上臂液压缸2-1收缩提起旋耕组件6。
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
- 一种用于甘蔗横向种植的开沟自动控制装置及其控制方法
- 一种用于双行甘蔗横向种植机的液压系统及控制方法