基于特征加权融合多传感器信息的液压阀故障诊断方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明属于机械设备故障诊断技术领域,具体公开了一种基于特征加权融合多传感器信息的液压阀故障诊断方法。
背景技术
液压阀作为液压系统的重要元件之一,已经被广泛的应用于工业生产设备和航天设备之中,液压阀主要用来控制流体的流量和压力。随着液压设备不断向着智能化更新换代,智能化提出了对液压系统中各元件进行自我诊断故障的要求,而液压阀落后的自我检测能力制约着其智能化的发展。对于液压系统来说,液压阀的状态监测和早期故障监测是非常有意义的,可以及时在故障发生前对液压系统采取补救措施,减少液压系统出现故障带来更严重的衍生危害。
在对液压阀故障检测的过程中,对液压阀进行状态数据的采集也是困难的,液压阀作为一个封闭的系统并且结构经过多年的打磨基本定型,在其内部加装传感器和改变液压阀结构都是困难的。所以,目前在液压阀内部难以实现液压阀准确的故障监测,为了收集状态信息,在液压阀外部加装传感器便成了最优的解决方案。
然而在液压阀的多种故障中,液压阀阀芯和阀体磨损的故障占其所有故障的发生的绝大比例。且液压阀产生的故障多为或因阀芯磨损或因阀体磨损产生的微弱泄露,难以通过单一种类的传感器监测故障的位置和故障的严重程度。
此外,作为包含电子控制和液压控制的液压元件,液压阀主要故障可分为两部分,电磁部分故障和机械部分故障。在传统的液压阀故障诊断过程中,大部分引起压力变化的故障都是基于压力传感器数据进行诊断的。但是仅仅依靠压力传感器采集的数据来诊断电磁故障是不够的,在其他故障诊断研究中,振动传感器对电磁部件的故障位置和故障严重程度更为敏感。例如采用压力传感器能监测故障发生的严重程度而无法确定故障发生的准确位置,液压阀中油路的长短和复杂度都会导致压力传感器难以准确的采集到故障信号。而只采用加速度传感器无法确定故障发生的严重程度,且振动的传输路径也会对加速度传感器的采集效果产生一定的干扰。因此,结合多个传感器共同对液压阀的故障进行诊断,无疑能够提高故障诊断的准确性和鲁棒性。
多传感器数据集融合是指对多个并行数据进行浅层融合,能够最有效地保留原始数据信息,但效率低,数据依赖度高。通常一些研究采用进一步的特征集融合对信号进行特征提取,有效地减少了融合所需的数据,提高了效率,提高了数据表示故障的能力。然而,融合的效果取决于特征是否能反映故障信息,因此一些研究采用多个特征来增强特征集的表征能力。但是采用多传感器就会带来海量的数据,并且海量数据之间可能会有存在信息对抗和信息冗余的问题。传统的故障诊断方法难以一次性的处理海量的数据,并且传统的故障诊断方法主要针对1D信号中时域和频域中出现故障的信息。但是对于液压阀来说难以通过其时域、频域中的信息直接判断故障,这归因于液压阀没有确定的故障特征频率。所以需要深入挖掘信号中的故障信息来实现液压阀的故障诊断。而卷积神经网络作为一种强大的信息处理模型,挖掘数据深层次的特征。另外,将传统的手工特征和深层次的网络特征相结合有助于增强特征集对故障的表达能力。
发明内容
本发明的目的在于提供一种基于特征加权融合多传感器信息的液压阀故障诊断方法,以解决液压阀的故障诊断过程中,对传感器信号的处理效率低、不精准的问题。
为了达到上述目的,本发明的基础方案为:基于特征加权融合多传感器信息的液压阀故障诊断方法,包括以下步骤:
S1利用压力传感器和加速度传感器对液压阀故障数据进行收集;
S2对收集的多传感器数据进行分割,获得信号样本;
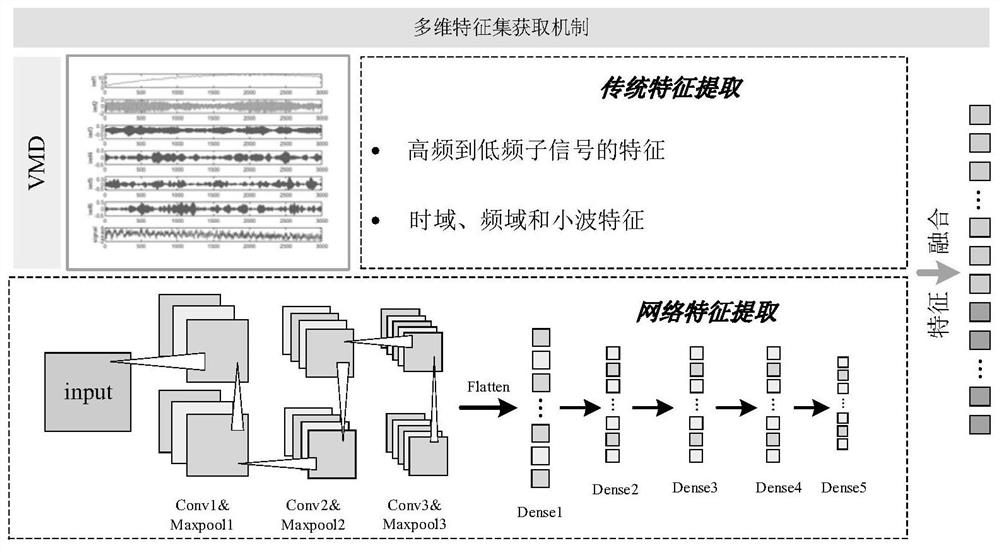
S3对信号样本的信号进行VMD分解获取从高频到低频的子信号,并对子信号进行多维特征提取,获得手动特征集;
S4将手动特征集与利用卷积神经网络提取信号样本的深层特征融合,获得多维特征集;
S5融合同质传感器的多维特征集并利用熵权法对每种特征进行加权,获得加权多维特征集;
S6引入注意力机制改进双通道卷积神经网络来融合异质传感器的加权多维特征集,实现故障准确分类。
本方案中异质传感器是指不同种类型的传感器,例如压力传感器和加速度传感器即为异质传感器;同质传感器是指同一类型的传感器,例如两个压力传感器可称为同质传感器。
本基础方案的有益效果在于:
1、本方案克服单一传感器无法准确表达液压阀故障的问题,对多个传感器信号的数据进行融合,利用特征加权来融合多传感器信息,有效地消除单个传感器信息不足和不完整造成的故障误判,使液压阀故障的诊断更为精准。
2、本方案S4将手动特征集与利用卷积神经网络提取信号样本的深层特征融合,获得多维特征集;能进一步丰富特征集,增加特征的多样性,提高特征集的故障表征能力。
3、本方案S6通过自动学习异质传感器信息的权重,提高了异质传感器信息融合故障诊断的准确性和鲁棒性;同时在异质传感器信息融合过程中,考虑到不同传感器对不同故障的不同诊断能力,引入了注意力机制,突出各种传感器在异质传感器信息融合中的优势。
4、为了消除同质传感器与多维特征之间的信息冗余和干扰,突出故障敏感特征,S5采用熵权法对特征进行加权,得到加权多维特征集;在不同的特征集中,每个特征都有不同的表示故障的能力,需要对故障敏感特征给予更多的权重,以削弱不敏感特征的干扰。
与现有技术相比,本诊断方法获得了更好的特征融合结果,提高了液压阀中故障诊断的准确性,提高了多传感器数据处理的效率。
进一步,S3中采用VMD对样本信号集中的样本信号进行分解,方法公式如下:
(1)根据公式
(2)引入拉格朗日乘子和二次惩罚函数,将上述有约束的变分问题转化为无约束的问题,公式如下所示:
(3)其中参数u
①初始化
②当n=n+1时进入循环,
③按照迭代公式进行迭代,直到分解次数达到K,
④给定精度ε,重复迭代使下式满足收敛条件:
通过此方法获得高频到低频的子信号准确度更高。
进一步,S3中③的K=6。
结合VMD对样本信号集中的样本信号进行分解方式,VMD分解的效果受K值的影响,当所选值为k值较小时,VMD算法等同于自适应滤波器组,将过滤原始信号中的一些重要信息,从而影响后续预测的准确性。当所选择的k值较大时,相邻模态分量的中心频率将更近,导致模态重复或额外的噪声。不同模式之间的主要区别在于中心频率的不同,因此通过观察不同模态数下中心频率的分布,选择合适的K值;本发明中,当K=6时,信号已经能够满足实验要求。
进一步,S3中手动特征提取多维度特征,多维度特征包括时域特征、频域特征、时频域特征。
通过通过传统的人工手动提取多维度特征,增加特征的多样性,提高特征集的故障表征能力。
进一步,S5中熵权法如下所示:
(1)计算各个指标的值,得到矩阵F
(2)对特征索引矩阵F进行标准化得到新的矩阵R
R=(r
(3)计算j
其中n为评价对象的数量;m为评价指标个数;
(4)计算每个指标的权重
(5)根据各指标的熵和权重计算最终的加权结果
在不同的特征集中,每个特征都有不同的表示故障的能力,因此对故障敏感特征给予更多的权重,以削弱不敏感特征的干扰。在特征提取阶段,本研究采用熵权法对各类特征赋予权重,增强特征集的鲁棒性和敏感性。
进一步,S5中对从两个同质传感器中提取的特征信息进行初步融合,获得了由两个传感器特征组成的稳健特征集。
初步融合是为了避免单个传感器信息表达的不准确和不完整,这个稳健特征集包含两个同质传感器信息,这个稳健特征集包含多样化的特征,可以提高其表达故障的能力,减少来自不敏感特征的干扰。
进一步,S6中针对每个故障自动学习不同类型传感器的权重。
每种类型的传感器对不同类型故障的敏感度是不同的,针对不同类型的传感器故障,充分发挥不同类型传感器的优势。
进一步,S6中当分类器训练完成后,得到一个通道加权的分类器,使用分类器对测试样本进行分类,得到最终的分类结果。
使得对液压阀故障监测的结果更为精确。
进一步,S1利用两个压力传感器和两个加速度传感器对液压阀故障数据进行收集。
满足本方案中对液压阀的故障监测,同时也不影响液压阀的正常使用。
附图说明
图1多维特征集获取机制;
图2液压换向阀故障诊断流程图;
图3用于特征提取的卷积神经网络结构;
图4基于卷积神经网络的注意力机制结构;
图5多传感器诊断结果混淆矩阵。
具体实施方式
下面通过具体实施方式进一步详细说明:
基于特征加权融合多传感器信息的液压阀故障诊断方法,包括以下步骤:
S1利用两个压力传感器和两个加速度传感器对液压阀故障数据进行收集;
S2对收集的多传感器数据进行分割获取信号样本,初步减少冲击对信号样本的影响;
S3为了获取从高频到低频的子信号,采用VMD对信号样本中的信号进行分解,方法公式如下所示。
(1)根据公式
(2)为解决变分问题,引入拉格朗日乘子和二次惩罚函数,将上述有约束的变分问题转化为无约束的问题。公式如下所示:
(3)其中参数u
①初始化
②当n=n+1时进入循环,
③按照迭代公式进行迭代,直到分解次数达到K,
④给定精度ε,重复迭代使下式满足收敛条件:
其中,VMD分解的效果受K值的影响,当所选值为k值较小时,VMD算法等同于自适应滤波器组,将过滤原始信号中的一些重要信息,从而影响后续预测的准确性。当所选择的k值较大时,相邻模态分量的中心频率将更近,导致模态重复或额外的噪声。不同模式之间的主要区别在于中心频率的不同,因此,通过观察不同模态数下中心频率的分布,选择合适的K值。本发明中,当K=6时,信号已经能够满足实验要求。
信号分解后,通过传统的人工方式手动提取多个频段的特征,即多维度特征,多维度特征包括时域特征、频域特征和时频域特征三部分,分别如表1所示。
表一 故障类型
S4为了进一步丰富特征集,采用卷积神经网络自动提取特征原始信号的特征,如图3所示;将本步骤获得特征与S3获得的多维度特征深层融合获得多维特征集,此方式增加特征的多样性,提高特征集的故障表征能力,特征提取的卷积神经网络结构如图1所示。
S5由于在不同的特征集中,每个特征都有不同的表示故障的能力,因此,我们需要对故障敏感特征给予更多的权重,以削弱不敏感特征的干扰;在特征提取阶段,本研究采用熵权法对各类特征赋予权重,增强特征集的鲁棒性和敏感性。熵权法如下所示:
(1)计算各个指标的值,得到矩阵F
(2)对特征索引矩阵F进行标准化得到新的矩阵R
R=(r
(3)计算j
其中n为评价对象的数量;m为评价指标个数;
(4)计算每个指标的权重
(5)根据各指标的熵和权重计算最终的加权结果
得到加权特征集后,为了避免单个传感器信息表达的不准确和不完整,对从两个同质传感器中提取的特征信息进行初步融合,获得了由两个传感器特征组成的稳健特征集;这个稳健特征集包含两个同质传感器信息,这个稳健特征集包含多样化的特征,可以提高其表达故障的能力,减少来自不敏感特征的干扰。
S6每种类型的传感器对不同类型故障的敏感度是不同的,如表2所示,
表二 不同传感器方法的故障诊断准确性
加入基于卷积神经网络的注意力机制,如图4所示,加强异质传感器信息融合方法的故障诊断能力,针对每个故障自动学习不同类型传感器的权重,针对不同类型的故障,充分发挥不同类型传感器的优势。注意力机制的结构如图2所示,随着分类器的训练,注意力机制不断调整通道的权重,当分类器训练完成后,得到一个通道加权的分类器。然后使用分类器对测试样本进行分类,得到最终的分类结果,如图5所示。
本方案中的诊断方法将液压阀的多维故障信息用多维特征组成的特征集表示,为了消除同质传感器与多维特征之间的信息冗余和干扰,突出故障敏感特征,采用熵权法对特征进行加权,得到故障特征敏感特征集。此外,在异质传感器信息融合过程中,考虑到不同传感器对不同故障的不同诊断能力,引入了注意力机制,突出各种传感器在异质传感器信息融合中的优势。因此,获得了更好的特征融合结果,提高了故障诊断的准确性。
根据实施例1中的诊断方法对液压阀进行故障诊断实验,经过实验得到液压阀故障诊断的准确率可达99.82%。实验结果表明:(1)同质传感器信息融合可以克服单个传感器信息的不准确性和不确定性,异质传感器的信息融合可以解决单个传感器无法准确描述液压阀故障的缺点。(2)多维特征的使用可以增强特征集的故障信息,加权方法的使用可以减少冗余引起的诊断准确率的降低,既可以避免信息的丢失,又可以提高特征集的稳定性。(3)注意力机制的引入,不仅提高了故障诊断的准确性,而且平衡了不同故障诊断对不同传感器信息的要求。
以上所述的仅是本发明的实施例,方案中公知的具体技术方案和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明技术方案的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本申请要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
- 基于特征加权融合多传感器信息的液压阀故障诊断方法
- 基于特征信息融合的燃气轮机进口导叶系统故障诊断方法