搬运机器人
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及汽车搬运领域,尤其涉及一种搬运机器人。
背景技术
现在的智能立体车库中都需要用到搬运机器,专利公告文件CN105839964B提供了一种汽车搬运机器人,但是这种汽车搬运机器只有夹轮装置(文献中附图标记序号为2)上的夹杆(文献中附图标记序号为204)可以发生相对转动以调整两根夹杆之间的夹角,而梳齿装置(文献中附图标记序号为4)上的梳齿(文献中附图标记序号为406,实质也是承载轮胎的杆子)始终处于平行的状态,所以这种机器人只有夹轮装置可以进行调整性的夹紧汽车轮子,所以这种机器人对汽车轮子的夹紧效果相对较差。
发明内容
本发明针对上述问题,提出了一种搬运机器人。
本发明采取的技术方案如下:
一种搬运机器人,包括第一搬运组件以及第二搬运组件,所述第一搬运组件与第二搬运组件通过连接机构可调节地连接在一起,所述第一搬运组件上设置有相互啮合在一起的旋转齿轮,所述第二搬运组件上设置有相互啮合在一起的旋转齿轮,所述旋转齿轮上均安装有夹持臂。
本种搬运机器人中,第一搬运组件与第二搬运组件上的夹持臂都采用旋转齿轮啮合安装的方式,相邻两个夹持臂之间的角度可以通过齿轮的转动来调节,在夹紧固定汽车轮子的过程中,对汽车轮子的夹紧效果更好,夹紧后汽车轮子不易打滑。
可选的,第一搬运组件以及第二搬运组件上均设置有夹持电机,所述夹持电机与旋转齿轮配合在一起。
夹持电机的作用是驱动旋转齿轮转动来调节两个夹持臂的夹角。
可选的,还包括激光测距仪,所述激光测距仪安装在第一搬运组件上。
激光测距仪的作用是测定第一搬运组件与第二搬运组件的距离,因为第一搬运组件与第二搬运组件是通过连接机构可调地连接固定在一起的,所以随时可以根据车辆的长度进行调节,以更好地夹紧固定车辆。
可选的,还包括行走轮组,所述第一搬运组件以及第二搬运组件上均安装有所述行走轮组。
行走轮组的作用是移动第一搬运组件或者第二搬运组件。
可选的,所述行走轮组包括架子、传动齿轮、转轴、减速电机以及行走轮,行走轮通过转轴安装在架子上,所述减速电机与转轴之间通过传动齿轮联动,所述架子上安装有导向轮。
架子设置导向轮,这样可以保证行走轮组在移动时不会发生偏向。具体行走轮采用聚氨酯材质的行走轮,这种材质的行走轮可以减震降噪。
可选的,所述行走轮组上设置有汽车底盘测距传感器。
行走轮组上的汽车底盘测距传感器是感应检测汽车底盘与第一搬运组件(或第二搬运组件)之间的距离,当汽车的轮胎中没气时(或者含气量较低时),会导致汽车底盘距离第一搬运组件的距离减少,当超过安全距离时,行走轮组会停止动作,这样可以提高搬运过程中的安全性。
可选的,所述夹持臂上转动安装有辊道。
辊道是可以转动的圆辊,辊道上可以进行转动,这样两个夹持臂在夹紧轮子的过程中夹持臂上的辊道与车轮接触,所以车轮与辊道之间发生的是滚动摩擦,这样可以最大幅度地减少夹持臂在夹紧车轮过程中的摩擦力。而如果夹持臂与车轮之间直接接触的话,夹持臂与车轮之间发生的是滑动摩擦,一则会对夹持臂产生较大的磨损,二则会对齿轮产生较大的应力。
可选的,所述连接机构包括齿条、锁定齿轮以及离合器,所述齿条的一端固定在第一搬运组件上,另一端与所述锁定齿轮啮合,所述锁定齿轮安装在离合器上。
设置离合器的作用是将齿条与锁定齿轮锁定在一起,当齿条与锁定齿轮被锁定在一起之后,第一搬运组件与第二搬运组件之间的距离将无法改变,而齿条与锁定齿轮未被锁定时,第一搬运组件与第二搬运组件之间的距离可以发生相对改变。当第一搬运组件与第二搬运组件的距离相对固定之后,二者成为一个刚性的整体,在搬运过程中不会因为第一搬运组件或者第二搬运组件卡阻发生间距变化。具体离合器与齿条以及锁定齿轮之间形成了一个锁定器。
可选的,还包括固定架,所述离合器设置在固定架上,所述固定架上设置在第二搬运组件上。
可选的,所述第一搬运组件与第二搬运组件设置有拖链。
具体第一搬运组件上还设置有电源接入装置。
本发明的有益效果是:第一搬运组件与第二搬运组件上的夹持臂都采用旋转齿轮啮合安装的方式,相邻两个夹持臂之间的角度可以通过齿轮的转动来调节,在夹紧固定汽车轮子的过程中,对汽车轮子的夹紧效果更好,夹紧后汽车轮子不易打滑。
附图说明:
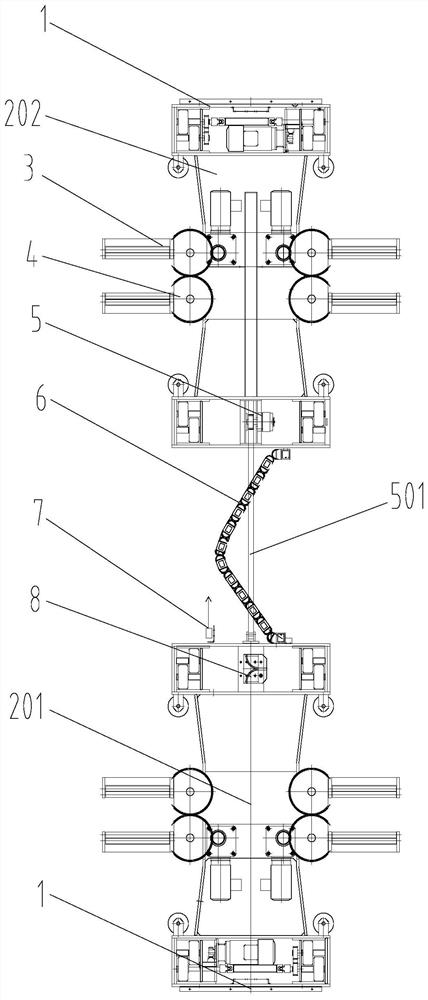
图1是搬运机器人示意简图,
图2是行走组件的结构示意简图,
图3是夹持臂旋转时的状态示意图,
图4是夹持臂夹持轮子状态时的示意简图,
图5是锁定器结构示意简图。
图中各附图标记为:1、行走轮组;101、导向轮;102、行走轮;103、转轴;104、减速电机;105、传动齿轮;106、测距传感器;107、架子;201、第一搬运组件;202、第二搬运组件;3、夹持臂;301、辊道;4、旋转齿轮;5、锁定器;501、齿条;502、锁定齿轮;503、离合器;504、固定架;6、拖链;7、激光测距仪;8、电源接入装置;9、夹持电机;10、轮子。
具体实施方式:
下面结合各附图,对本发明做详细描述。
如附图1所示,一种搬运机器人,包括第一搬运组件201以及第二搬运组件202,第一搬运组件201与第二搬运组件202通过连接机构可调节地连接在一起,第一搬运组件201上设置有相互啮合在一起的旋转齿轮4,第二搬运组件202上设置有相互啮合在一起的旋转齿轮4,旋转齿轮4上均安装有夹持臂3。
本种搬运机器人中,第一搬运组件201与第二搬运组件202上的夹持臂3都采用旋转齿轮4啮合安装的方式,相邻两个夹持臂3之间的角度可以通过齿轮的转动来调节,在夹紧固定汽车轮子10的过程中,对汽车轮子10的夹紧效果更好,夹紧后汽车轮子10不易打滑。
如附图1、附图3及附图4所示,第一搬运组件201以及第二搬运组件202上均设置有夹持电机9,夹持电机9与旋转齿轮4配合在一起。
附图3中箭头所指的方向为夹持臂的转动方向。
夹持电机9的作用是驱动旋转齿轮4转动来调节两个夹持臂3的夹角。
如附图1所示,还包括激光测距仪7,激光测距仪7安装在第一搬运组件201上。
激光测距仪7的作用是测定第一搬运组件201与第二搬运组件202的距离,因为第一搬运组件201与第二搬运组件202是通过连接机构可调地连接固定在一起的,所以随时可以根据车辆的长度进行调节,以更好地夹紧固定车辆。
如附图1所示,还包括行走轮组1,第一搬运组件201以及第二搬运组件202上均安装有行走轮组1。
行走轮组1的作用是移动第一搬运组件201或者第二搬运组件202。
如附图1及附图2所示,行走轮组1包括架子107、传动齿轮105、转轴103、减速电机104以及行走轮102,行走轮102通过转轴103安装在架子107上,减速电机104与转轴103之间通过传动齿轮联动,架子107上安装有导向轮101。
架子107设置导向轮101,这样可以保证行走轮组1在移动时不会发生偏向。具体行走轮102采用聚氨酯材质的行走轮102,这种材质的行走轮102可以减震降噪。
如附图2所示,行走轮组1上设置有测距传感器106。
行走轮组1上的测距传感器106是感应检测汽车底盘与第一搬运组件201(或第二搬运组件202)之间的距离,当汽车的轮胎中没气时(或者含气量较低时),会导致汽车底盘距离第一搬运组件201的距离减少,这样可以提高搬运过程中的安全性。
如附图1、附图3以及附图4所示,夹持臂3上转动安装有辊道301。
辊道301是可以转动的圆辊,辊道301上可以进行转动,这样两个夹持臂3在夹紧轮子10的过程中夹持臂3上的辊道301与轮子10接触,所以轮子10与辊道301之间发生的是滚动摩擦,这样可以最大幅度地减少夹持臂3在夹紧轮子10过程中的摩擦力。而如果夹持臂3与轮子10之间直接接触的话,夹持臂3与轮子10之间发生的是滑动摩擦,一则会对夹持臂3产生较大的磨损,二则会对齿轮产生较大的应力。
具体参看附图4,每个夹持臂3上设置有一个斜面坡,2个辊道301安装在这个斜面坡上,2个辊道301相互平行,由于斜面坡度存在,两个夹持臂在夹紧轮子的过程中可以顺利地夹紧轮子,确保轮子可以顺利滑上夹持臂,且斜面坡加转动辊道组合的方式在夹紧轮子的过程中,可以保证在夹紧轮子的过程中滑动摩擦力最小化。
如附图5所示,连接机构包括齿条501、锁定齿轮502以及离合器503,齿条501的一端与第一搬运组件201相接,离合器503固定设置,另一端锁定齿轮502啮合,锁定齿轮502安装在离合器503上。
设置离合器503的作用是将齿条501与锁定齿轮502锁定在一起,当齿条501与锁定齿轮502被锁定在一起之后,第一搬运组件201与第二搬运组件202之间的距离将无法改变,而齿条501与锁定齿轮502未被锁定时,第一搬运组件201与第二搬运组件202之间的距离可以发生相对改变。当第一搬运组件201与第二搬运组件202的距离相对固定之后,二者成为一个刚性的整体,在搬运过程中不会因为卡阻发生间距变化。具体离合器503与齿条501以及锁定齿轮502之间形成了一个锁定器5。
如附图1及附图5所示,还包括固定架504,离合器503设置在固定架504上,固定架504上设置在第二搬运组件202上。
如附图1所示,第一搬运组件201与第二搬运组件202设置有拖链6。
具体第一搬运组件201上还设置有电源接入装置8。、
具体本实施方式所提供的搬运机器人中,整个搬运机器人凸出地面高度75mm,这样可以搬运底盘高度大于80mm的汽车。
且由于本实施方式中搬运机器人的第一搬运组件与第二搬运组件的距离可以调整,所以本种搬运机器人可以搬运轴距2000mm~3300mm的车辆。
以上所述仅为本发明的优选实施例,并非因此即限制本发明的专利保护范围,凡是运用本发明说明书所作的等效变换,直接或间接运用在其他相关的技术领域,均同理包括在本发明的保护范围内。
- 搬运机器人及具有该搬运机器人的搬运系统
- 搬运机器人及具有该搬运机器人的搬运系统