一种卫星导航接收机定位误差测试装置及其使用方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及卫星导航领域,具体涉及一种卫星导航接收机定位误差测试装置及其使用方法。
背景技术
随着科技的发展,导航定位系统的应用范围越来越广,外界对导航定位系统的定位精度也提出的新的要求,导航接收机广泛应用于高中低轨各类卫星中,其作用为卫星在轨运行时接收GPS(Global Positioning System,全球定位系统)卫星发出的定位数据,解算出星时和卫星轨道位置,为星务软件所用,完成卫星在轨任务。导航接收机性能好坏影响卫星载荷工作有效性。
现有的卫星导航接收机定位误差测试装置存在不足之处,分析方法过于单一,得出的结论缺乏准确性。
发明内
本发明的目的在于克服现有技术中存在的上述问题,提供一种卫星导航接收机定位误差测试装置及其使用方法。
为实现上述技术目的,达到上述技术效果,本发明是通过以下技术方案实现:
一种卫星导航接收机定位误差测试装置,包括接收机本体,所述接收机本体下方设置有支撑底座,所述支撑底座内腔安装有伺服电机,所述伺服电机输出端套接有主动斜齿轮,所述支撑底座顶部转动贯穿有连接转杆,所述连接转杆底部位于支撑底座内腔套接有从动斜齿轮,所述主动斜齿轮和从动斜齿轮相互啮合,所述连接转杆顶部位于支撑底座上方固定有转动丝杠,所述转动丝杠外壁螺接套设有升降滑杆,所述升降滑杆顶部和接收机本体底部固定连接。
优选地,所述转动丝杠顶部位于升降滑杆内腔固定有限位挡块,所述支撑底座顶部固定有连接撑板,所述连接撑板上开设有固定滑槽,所述升降滑杆外壁固定有和固定滑槽滑动连接的防转连杆。
一种卫星导航接收机定位误差测试方法,包括以下步骤:
步骤S1:包括星历误差,所述星历误差为卫星星历给出的卫星在空间的位置与卫星的实际位置之差;
步骤S2:卫星钟差,卫星钟差是卫星上所安装的原子钟的钟面时与GPS标准时间之间的误差;
步骤S3:大气折射误差:信号在穿过大气时,速度将发生变化,传播路径也将发生弯曲,也称大气延迟。在GPS测量定位中,通常仅考虑信号传播速度的变化;
步骤S4:电离层的电子密度与总电子含量误差,单位体积中所包含的电子数;
步骤S5:调整接收机本体的高度,增强信号强度。
优选地,所述步骤S1:广播星历(预报星历)的精度,(无SA)±20米,(有SA)土100米,精密星历(后处理星历)的精度可达1厘米。
优选地,精密定轨(后处理)相对定位或差分定位,星历误差对单点定位的影响主要取决于卫星到接收机的距离以及用于定位或导航的GPS卫星与接收机构成的几何图形。
优选地,所述步骤S2:由卫星的主控站,通过对卫星时钟运行状态的连续监测确定,并通过卫星的导航电文提供给接收机。经钟差女正后,各卫星之间的同步差,即可保持在20ns以内。
优选地,所述大气折射误差色散介质和非色散介质,所述色散介质对不同频率的信号,所产生的折射效应也不同,所述非色散介质:对不同频率的信号,所产生的折射效应相同,对GPS信号来说,电离层是色散介质,对流层是非色散介质。
优选地,所述电子含量与太阳活动密切相关,太阳活动剧烈时,电子含量增加太阳活动周期约为11年,利用双频观测值直接计算出延迟改正或组成无电离层延迟的组合观测量。
优选地,启动伺服电机,带动主送斜齿轮转动,由于主动斜齿轮和从动斜齿轮相互啮合,进而带动转动丝杠进行转动,由于转动丝杠外壁螺接套设有升降滑杆,带动顶部的接收机本体的高度,以便于调整接受信号。
有益效果:
1、测量的关键是与误差作斗争,以求在一定条件下,获得误差影响最小的、最优的测量结果。
2、启动伺服电机,带动主送斜齿轮转动,由于主动斜齿轮和从动斜齿轮相互啮合,进而带动转动丝杠进行转动,由于转动丝杠外壁螺接套设有升降滑杆,带动顶部的接收机本体的高度,以便于调整接受信号。
当然,实施本发明的任一产品并不一定需要同时达到以上的所有优点。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
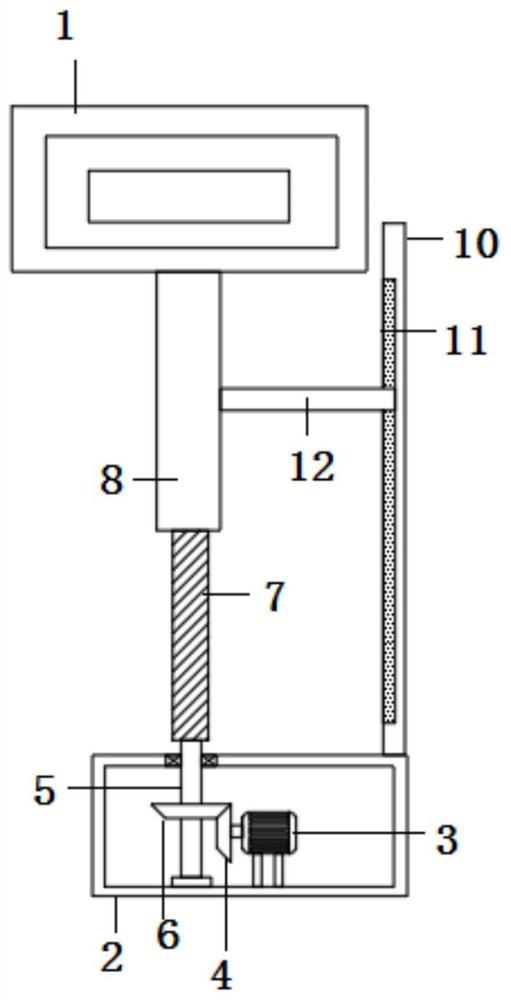
图1本发明结构示意图;
图2本发明卫星导航定位误差示意图;
图3本发明卫星导航系统连接图;
图4本发明升降滑杆连接示意图;
图5本发明接收机测量轨迹示意图;
附图中标号如下:
1-接收机本体,2-支撑底座,3-伺服电机,4-主动斜齿轮,5-连接转杆,6-从动斜齿轮,7-转动丝杠,8-升降滑杆,9-限位挡块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
如图1-5所示,本发明为一种卫星导航接收机定位误差测试装置,包括接收机本体1,接收机本体1下方设置有支撑底座2,支撑底座2内腔安装有伺服电机3,伺服电机3输出端套接有主动斜齿轮4,支撑底座2顶部转动贯穿有连接转杆5,连接转杆5底部位于支撑底座2内腔套接有从动斜齿轮6,主动斜齿轮4和从动斜齿轮6相互啮合,连接转杆5顶部位于支撑底座2上方固定有转动丝杠7,转动丝杠7外壁螺接套设有升降滑杆8,升降滑杆8顶部和接收机本体1底部固定连接其中,转动丝杠7顶部位于升降滑杆8内腔固定有限位挡块9,支撑底座2顶部固定有连接撑板10,连接撑板10上开设有固定滑槽11,升降滑杆8外壁固定有和固定滑槽11滑动连接的防转连杆12。
本实施例的一个具体应用为:步骤S1:包括星历误差,星历误差为卫星星历给出的卫星在空间的位置与卫星的实际位置之差;
星钟差,卫星钟差是卫星上所安装的原子钟的钟面时与GPS标准时间之间的误差;
大气折射误差:信号在穿过大气时,速度将发生变化,传播路径也将发生弯曲,也称大气延迟。在GPS测量定位中,通常仅考虑信号传播速度的变化;
电离层的电子密度与总电子含量误差,单位体积中所包含的电子数;
整接收机本体1的高度,增强信号强度。
广播星历预报星历的精度,无SA±20米,有SA土100米,精密星历后处理星历的精度可达1厘米。
精密定轨后处理相对定位或差分定位,星历误差对单点定位的影响主要取决于卫星到接收机的距离以及用于定位或导航的GPS卫星与接收机构成的几何图形。
由卫星的主控站,通过对卫星时钟运行状态的连续监测确定,并通过卫星的导航电文提供给接收机。经钟差女正后,各卫星之间的同步差,即可保持在20ns以内。
大气折射误差色散介质和非色散介质,色散介质对不同频率的信号,所产生的折射效应也不同,非色散介质:对不同频率的信号,所产生的折射效应相同,对GPS信号来说,电离层是色散介质,对流层是非色散介质。
电子含量与太阳活动密切相关,太阳活动剧烈时,电子含量增加太阳活动周期约为11年,利用双频观测值直接计算出延迟改正或组成无电离层延迟的组合观测量。
启动伺服电机3,带动主送斜齿轮转动,由于主动斜齿轮4和从动斜齿轮6相互啮合,进而带动转动丝杠7进行转动,由于转动丝杠7外壁螺接套设有升降滑杆8,带动顶部的接收机本体1的高度,以便于调整接受信号。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料过着特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式,显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种卫星导航接收机定位误差测试装置及其使用方法
- 一种定位解算方法、装置及卫星导航接收机