楼梯运输机器人及控制方法
文献发布时间:2024-01-17 01:28:27
技术领域
本发明涉及运输作业机器人领域,具体地涉及一种楼梯运输机器人。
背景技术
当今人口老龄化是世界人口发展的基本趋势,我国作为人口最多的发展中国家,自九十年代开始,就已经开始逐步进入老年化社会,目前处于人口老龄化迅速发展时期。通过走访调查,我们发现老年人由于身体功能退化,出现行动不便易摔、膝盖弯曲困难的情况,导致老年人上下楼费力、费时。不仅是老年人,其他行动不便的人群如有腿疾的人、身体虚脱的人等,被爬楼梯所困,望楼却步。因此,帮助老弱人群在未安装电梯的房中(尤其是自建房、复式房屋)上下楼是一个十分重要的民生热点问题。
目前市场上出现了几种楼梯运输机器人,主要分为两类:一类是以运货为主的手扶式楼梯运输机器人,需要一个身体正常的人操作;另一类是辅助老弱人群上下楼的楼梯运输机器人。助老弱人群的楼梯运输机器人,大部分是履带轮椅形式的,在平路上可以行驶,在楼梯上可以自动爬行,但是在爬楼的起始阶段和结束阶段,需要有人帮助把轮椅式楼梯运输机器人放倒到楼梯上或扶立起来,那么在没有人照看的情况下,就没有办法方便老人使用。
发明内容
本发明的目的是为了克服现有技术存在的现有的楼梯运输机器人使用不便的问题,提供一种楼梯运输机器人,该楼梯运输机器人不仅可以在楼梯上面爬行,而且可以在地面上运行,并且爬楼过程中全自动运行,不需要外人的帮助。
为了实现上述目的,本发明一方面提供一种楼梯运输机器人包括底盘,底盘上设置若干车轮和前、后两组爬升机构,底盘前端安装可升降的前爬升机构,底盘的后端安装可升降的后爬升机构,爬升机构包括安装在底盘上的顶升系统,顶升系统驱动竖直设置的升降杆上下运动,升降杆的底部设置有移动轮;其中前爬升机构的升降杆的顶部还安装有引导轮,前爬升机构和/或后爬升机构左右对称设置有两个。
优选的,所述顶升系统包括固定在底盘上且竖直设置到导轨以及提升机构,升降杆的顶部安装有滑座,滑座与所述导轨配合,提升机构驱动滑座沿着导轨运动。
优选的,所述提升机构包括固定在底盘上的驱动电机,驱动电机的输出轴上连接竖直向上延伸的丝杠;升降杆的顶部还连接有丝杆螺母用于配合丝杆带动升降杆上下运动。
优选的,所述前爬升机构的升降杆的顶部连接向前延伸的延长杆,引导轮安装在延长杆的最前端。
优选的,所述延长杆转动安装在升降杆上,延长杆能够在升降杆上上下摆动;升降杆上固定电机,电机的输出端连接升降杆,驱动电机具有自锁功能。
优选的,所述机器人还包括电源及控制系统,控制系统控制底盘上滚轮的转动、前、后爬升机构的升降运动,以及爬升机构上的移动轮和导向轮的转动。
优选的,所述底盘的前端设置第一障碍物传感器,在前爬升机构升降杆的底部安装第二障碍物传感器,在前爬升机构延长杆的前端设置第三障碍物传感器,第一、第二和第三障碍物传感器检测前方的障碍物。
优选的,后爬升机构的底部安装第四障碍物传感器,底盘的前端安装第五障碍物传感器,前爬升机构的底部安装第六障碍物传感器;第四、第五和第六障碍物传感器检测下方的障碍物。
本发明第二方面提供楼梯运输机器人爬楼控制方法,所述楼梯运输机器人为本申请所提供的楼梯运输机器人,其特征在于,包括以下步骤:
a.底盘移动到楼梯处,底盘的前端遇到一阶楼梯的踢面,此时前爬升机构顶部的引导轮压在第一阶楼梯的踏面上,
b.前、后爬升机构的移动轮支撑地面,然后底盘向上运动到底盘上的车轮与第一阶台阶的踏面平齐,
c.爬升机构的移动轮驱动底盘继续向前运动,直到前爬升机构的移动轮贴近第一阶楼梯的踢面,
d.前爬升机构抬升到前爬升机构的移动轮和底盘的车轮平齐,
e.底盘继续向前运动,直到底盘前端遇到第二阶台阶的踢面,此时前爬升机构顶部的引导轮压在第二阶楼梯的踏面上,然后后爬升机构向上运动,直到爬升机构的移动轮与底盘的车轮平齐;
重复上述步骤即可让楼梯运输机器人沿着楼梯的台阶逐级向上。
通过上述技术方案,底盘用于承载人员或者连接轮椅等结构。然后底盘上的前后两组爬升机构配合底盘,驱动底盘在楼梯的台阶上爬升。日常在平地上可以用底盘直接移动。
附图说明
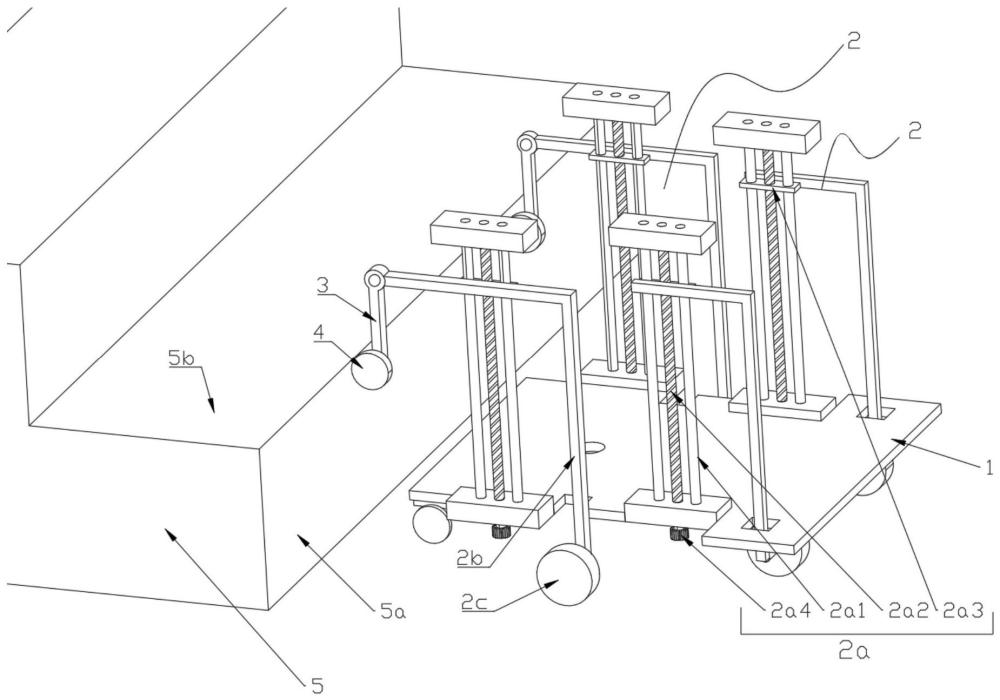
图1是楼梯运输机器人的结构示意图。
附图标记说明
1-底盘,
2-爬升机构,2a-顶升系统,2a1-导轨,2a2-丝杠,2a3-滑座,2a4-驱动电机,2b-升降杆,2c-移动轮,
3-延长杆,
4-引导轮,
5-楼梯,5a-踢面,5b-踏面。
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
在本发明中,在未作相反说明的情况下,使用的方位词如“前、后、左、右”通常是指底盘1向前运动时的位置关系。“内、外”是指装置本身的内、外关系
楼梯运输机器人,包括底盘1,底盘1上设置若干车轮和前、后两组爬升机构2,底盘1前端安装可升降的前爬升机构,底盘1的后端安装可升降的后爬升机构,爬升机构2包括安装在底盘1上的顶升系统2a,顶升系统2a驱动竖直设置的升降杆2b上下运动,升降杆2b的底部设置有移动轮2c;其中前爬升机构的升降杆2b的顶部还安装有引导轮4,前爬升机构和/或后爬升机构左右对称设置有两个。
其中底盘1就是一个带有车轮的移动平台,车轮自带动力驱动底盘1向前移动以及转向结构,底盘1本身的形式现有技术中有充分的公开,在此不再过多赘述。移动平台上带有相关的接口用于和轮椅或者椅子等载人部件连接。
如图1中所示的,爬升机构2在底盘1的前后均有设置,爬升机构2在底盘1上可以升降,爬升机构2的底部带有移动轮2c,前、后爬升机构同时支撑在地面上时,可以将底盘1向上抬升。因此前爬升机构和/或后爬升机构左右对称设置有两个,如图1中所示的,前爬升机构设置在底盘1前端的左右两侧,后爬升机构设置在底盘1后端的左右两侧。
爬升机构2的顶升系统2a的目的是驱动升降杆2b在底盘1上上下运动,因此顶升系统2a可以采用液压缸或者电推杆,也可以采用丝杆等直线驱动机构。升降杆2b的底部的移动轮2c自带动力,可以通过移动轮2c推动底盘1向前移动。
如图1中所示的,所述顶升系统2a包括固定在底盘1上且竖直设置到导轨2a1以及提升机构,升降杆2b的顶部安装有滑座2a3,滑座2a3与所述导轨2a1配合,提升机构驱动滑座2a3沿着导轨2a1运动。所述提升机构包括固定在底盘1上的驱动电机2a4,驱动电机2a4的输出轴上连接竖直向上延伸的丝杠2a2;升降杆2b的顶部还连接有丝杆螺母用于配合丝杆带动升降杆2b上下运动。
其中导轨2a1可以是图1中的光杠或者采用竖杆上设置燕尾槽等滑槽结构。总之导轨2a1的目的是约束升降杆2b的移动方向,让升降杆2b只能沿着导轨2a1运动。再利用和导轨2a1平行的丝杠2a2来驱动升降杆2b运动。并且丝杠2a2带有自锁能力,便于升降杆2b支撑底盘1。而且丝杆采用驱动电机2a4带动丝杆转动,相较于液压系统结构上更加简化。
在爬楼爬升过程中需要引导轮4首先压在前方更高一阶台阶的踏面5b上,因此前爬升机构的升降杆2b的顶部连接向前延伸的延长杆3,引导轮4安装在延长杆3的最前端。引导轮4位于底盘1最前缘的前方,也就是引导轮4的投影延伸到底盘1的前方。
由于不同的台阶其每一阶的高度可能有所不同,也就是其踢面5a的高度不同。因此所述延长杆3转动安装在升降杆2b上,延长杆3能够在升降杆2b上上下摆动;升降杆2b上固定电机,电机的输出端连接升降杆2b,驱动电机2a4具有自锁功能。通过延长杆3的上下摆动可以调整引导轮4和底盘1上车轮的垂直高度。
所述机器人还包括电源及控制系统,控制系统控制底盘1上滚轮的转动、前、后爬升机构的升降运动,以及爬升机构2上的移动轮2c和导向轮的转动。控制系统可以控制底盘1的移动以及转向,也就是控制车轮的转动;并且控制系统控制爬升机构2运动也就是控制爬升机构2的驱动电机2a4,驱动电机2a4带动丝杆转动,丝杆推动升降杆2b升降。同时控制系统还可以控制延长杆3的摆动也就是控制延长杆3电机转动。
所述底盘1的前端设置第一障碍物传感器,在前爬升机构升降杆2b的底部安装第二障碍物传感器,在前爬升机构延长杆3的前端设置第三障碍物传感器,第一、第二和第三障碍物传感器检测前方的障碍物。
后爬升机构的底部安装第四障碍物传感器,底盘1的前端安装第五障碍物传感器,前爬升机构的底部安装第六障碍物传感器;第四、第五和第六障碍物传感器检测下方的障碍物。
同时本发明还提出了一上述楼梯运输机器人的控制方法。
楼梯运输机器人爬楼控制方法,所述楼梯运输机器人为本发明所提出的楼梯运输机器人,包括以下步骤:
a.底盘1移动到楼梯5处,底盘1的前端遇到一阶楼梯5的踢面5a,此时前爬升机构顶部的引导轮4压在第一阶楼梯5的踏面5b上,
b.前、后爬升机构的移动轮2c支撑地面,然后底盘1向上运动到底盘1上的车轮与第一阶台阶的踏面5b平齐,
c.爬升机构2的移动轮2c驱动底盘1继续向前运动,直到前爬升机构的移动轮2c贴近第一阶楼梯5的踢面5a,
d.前爬升机构抬升到前爬升机构的移动轮2c和底盘1的车轮平齐,
e.底盘1继续向前运动,直到底盘1前端遇到第二阶台阶的踢面5a,此时前爬升机构顶部的引导轮4压在第二阶楼梯5的踏面5b上,然后后爬升机构向上运动,直到爬升机构2的移动轮2c与底盘1的车轮平齐;
重复上述步骤即可让楼梯运输机器人沿着楼梯5的台阶逐级向上。在后续的重复过程中重复步骤b、c、d、e即可。需要下楼时,这按照相反的顺序反向操作。
这里的第一、第二仅仅是为了表述方便进行的区分,并不限于最下方的楼梯。
在步骤a时,首先转动延长杆3,调整延长杆3末端引导轮4的高度,让引导轮4底部高度和底盘1上车轮底部高度的高差等于台阶的高度。
在进行上楼时:步骤a中当第一障碍物传感器检测到障碍物楼梯5的踢面5a时,则开始执行步骤b时。步骤b执行过程中,当第一障碍物传感器检测到障碍物楼梯5的踢面5a消失时,则结束步骤b开始执行步骤c。步骤c中,当第二障碍物传感器检测到前方障碍物楼梯5的踢面5a时开始执行步骤d。步骤d中,爬升机构2向上运动,然后第二障碍物传感器检测到障碍物楼梯5的踢面5a消失后结束前爬升机构的运动,开始执行步骤e。在步骤e中首先底盘1向前移动,当第六障碍物传感器检测到障碍物楼梯5的踏面5b时,后爬升机构向上运动直到后爬升机构的移动轮2c回归初始位置。
进行下楼操作时:当后爬升机构上的第四障碍物传感器检测到障碍物消失后,开始让后爬升机构下降,直到后爬升机构的移动轮2c着地。然后底盘1向后运动,直到前爬升机构底部的第四障碍物传感器检测到障碍物楼梯5的踏面5b消失后开始让前爬升机构下降直到前爬升机构的移动轮2c着地。紧接着底盘1继续向后运动,直到底盘1前端的第五障碍物传感器检测到障碍物楼梯5的踏面5b消失后,让底盘1下降直到底盘1的车轮着地。然后重复上述操作即可逐步下楼。这里进行下楼操作时,底盘1的前后可以对调操作。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于此。在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,包括各个具体技术特征以任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。但这些简单变型和组合同样应当视为本发明所公开的内容,均属于本发明的保护范围。
- 一种双足机器人爬楼梯步态规划方法、装置及机器人
- 运输机器人的控制方法、系统、控制终端及运输机器人
- 运输机器人的控制方法、系统、控制终端及运输机器人