基于临时相干散射体的InSAR测量方法及装置、存储介质
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及InSAR技术领域,具体涉及一种基于临时相干散射体的InSAR测量方法及装置、存储介质。
背景技术
中国山地丘陵区约占国土面积的65%,地质条件复杂,构造活动频繁,崩塌、滑坡、泥石流等突发性地质灾害点多面广、防范难度大,是世界上地质灾害最严重、受威胁人口最多的国家之一。目前,已发现全国共有地质灾害隐患点近30万处,威胁约2000万人的生命安全和4500亿元的财产安全。如何提前发现和有效识别出重大地质灾害的潜在隐患并加以主动防控,已成为近期地质灾害防治领域集中关注的焦点和难点。填海区的沉降,同样对楼房、公共设施等建筑物的安全稳定性造成威胁。
其中,对于地质区域变形量的测量则是提前发现和有效识别重大地质灾害的核心技术,常用的变形测量方法包括全站仪观测法、水准沉降观测法等,这些测量方法通常需要现场设置测量标志,定期人工现场操作,需耗费大量的人力物力,包括目前已逐渐成熟的北斗/GNSS观测技术同样需要现场布点,且价格较为昂贵。
由于具有大范围、高精度、全天时全天候测量的优势,InSAR技术已逐渐成熟应用于城市地面沉降观测、滑坡变形监测等领域。但是,滑坡体表面的植被生长或变形梯度过大、填海区表面的施工均可导致InSAR干涉图在某个时间段内出现失相干现象。现有的永久散射体和同分布散射体干涉测量技术主要利用在整个观测期内相干性保持较高或在短时间观测期内相干性保持较高且保持连续的像元点,对于仅在部分时间段内保持相干性的散射体无法获取有效的监测结果。
发明内容
本发明主要解决的技术问题是如何获取临时相干散射体的InSAR测量结果。
根据第一方面,一种实施例中提供一种基于临时相干散射体的InSAR测量方法,包括:
获取待监测区域的SAR影像序列,所述SAR影像序列包括连续监测时间的多景SAR影像;
对SAR影像序列中每两景SAR影像进行干涉处理,得到多个干涉图;
根据多个所述干涉图,确定SAR影像中的临时相干像素点和永久相干像素点;
对所确定的所述临时相干像素点进行相位解缠,得到所述临时相干像素点的相位解缠序列;
将所述相位解缠序列转换为所述临时相干像素点的变形序列;
基于所述临时相干像素点的变形序列,拟合获取所述临时相干像素点的累计变形序列,所述临时相干像素点的累计变形序列用于监测该临时相干像素点的累计变形量。
根据第二方面,一种实施例中提供一种基于临时相干散射体的InSAR测量装置,包括:
获取模块,用于获取待监测区域的SAR影像序列,所述SAR影像序列包括连续监测时间的多景SAR影像;
干涉处理模块,用于对SAR影像序列中每两景SAR影像进行干涉处理,得到多个干涉图;
临时相干像素点提取模块,用于根据多个所述干涉图,确定SAR影像中的临时相干像素点和永久相干像素点;
相位解缠模块,用于对所确定的所述临时相干像素点进行相位解缠,得到所述临时相干像素点的相位解缠序列;
变形序列确定模块,用于将所述相位解缠序列转换为所述临时相干像素点的变形序列;
累计变形序列确定模块,用于基于所述临时相干像素点的变形序列,拟合获取所述临时相干像素点的累计变形序列,所述临时相干像素点的累计变形序列用于监测该临时相干像素点的累计变形量。
根据第三方面,一种实施例中提供计算机可读存储介质,包括程序,所述程序能够被处理器执行以实现上述实施例所述的方法。
依据上述实施例的基于临时相干散射体的InSAR测量方法及装置,通过对SAR影像序列中每两景SAR影像进行干涉处理,获取相干相位矩阵,基于相干相位矩阵对SAR影像中的临时相干像素点进行识别,对所识别的临时相干像素点进行相位解缠,以得到临时相干像素点的变形序列,从而实现对临时相干像素点的变形量的监测,以获取临时相干散射体的InSAR测量结果。
附图说明
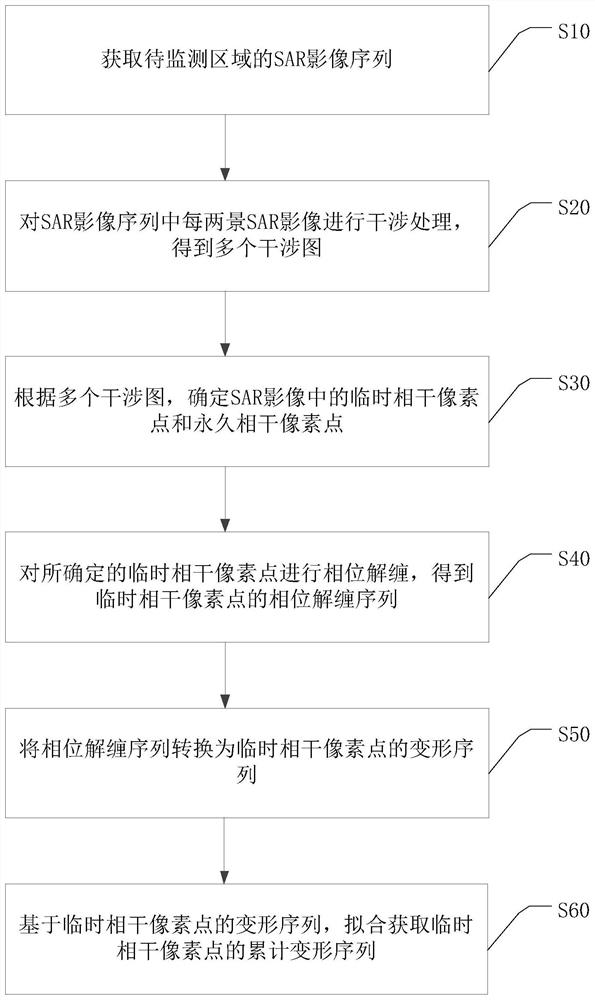
图1为一种实施例的基于临时相干散射体的InSAR测量方法的流程图;
图2为一种实施例的基于临时相干散射体的InSAR测量装置的结构示意图;
图3为采用现有方法的InSAR测量结果图;
图4为采用本发明实施例的InSAR测量结果图。
具体实施方式
下面通过具体实施方式结合附图对本发明作进一步详细说明。其中不同实施方式中类似元件采用了相关联的类似的元件标号。在以下的实施方式中,很多细节描述是为了使得本申请能被更好的理解。然而,本领域技术人员可以毫不费力的认识到,其中部分特征在不同情况下是可以省略的,或者可以由其他元件、材料、方法所替代。在某些情况下,本申请相关的一些操作并没有在说明书中显示或者描述,这是为了避免本申请的核心部分被过多的描述所淹没,而对于本领域技术人员而言,详细描述这些相关操作并不是必要的,他们根据说明书中的描述以及本领域的一般技术知识即可完整了解相关操作。
另外,说明书中所描述的特点、操作或者特征可以以任意适当的方式结合形成各种实施方式。同时,方法描述中的各步骤或者动作也可以按照本领域技术人员所能显而易见的方式进行顺序调换或调整。因此,说明书和附图中的各种顺序只是为了清楚描述某一个实施例,并不意味着是必须的顺序,除非另有说明其中某个顺序是必须遵循的。
本文中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本申请所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。
请参考图1,图1为一种实施例的基于临时相干散射体的InSAR测量方法的流程图,其包括步骤S10至步骤S50,下面具体说明。
步骤S10,获取待监测区域的SAR影像序列,其中SAR影像序列包括连续监测时间的多景SAR影像。
步骤S20,对SAR影像序列中每两景SAR影像进行干涉处理,得到多个干涉图。
步骤S30,根据多个所述干涉图,确定SAR影像中的临时相干像素点和永久相干像素点。
步骤S40,对所确定的临时相干像素点进行相位解缠,得到临时相干像素点的相位解缠序列。
步骤S50,将相位解缠序列转换为所述临时相干像素点的变形序列,其中临时相干像素点的变形序列用于表现SAR影像中临时相干像素点的变形情况。
步骤S60,基于临时相干像素点的变形序列,拟合获取所述临时相干像素点的累计变形序列,其中临时相干像素点的累计变形序列用于监测该临时相干像素点的累计变形量。
在本实施例中,假设待监测区域的SAR影像序列中包括N景监测时间连续的SAR影像,通过对N景SAR影像中每两景SAR影像进行干涉处理,得到InSAR干涉图序列,也就是得到N*(N-1)/2个干涉图。并且,SAR影像序列中的所有SAR影像为同一区域的拍摄影像,其具有相同的像素点。
根据上述得到的N*(N-1)/2干涉图,确定SAR影像中的临时相干像素点和永久相干像素点,包括:
确定干涉图中每个相干像素点的干涉相位和相干系数。
根据每个相干像素点的所述干涉相位和相干系数,构成每个相干像素点对应的相干相位矩阵C,其中相干相位矩阵
其中,p和q为SAR影像的序列号,p和q取值为1,2…N,
换而言之,SAR影像序列中的所有像素点在经过干涉处理后,均能够得到一个相干相位矩阵,即每个像素点均对应一个相干相位矩阵。
对干涉图中的所有相干像素点进行以下遍历:
若当前相干像素点对应的相干相位矩阵C,在部分监测时间内干涉相位无效,则当前相干像素点为临时相干像素点;
其中,若存在相干系数小于设定阈值,则该干涉相位为无效干涉相位,否则该干涉相位为有效干涉相位。将无效干涉相位和相干系数从相干相位矩阵C中去掉,然后通过连通性判别实现去掉无效干涉相位后有效监测时段的判别,其中连通性判别可采用DFS、BFS、Tarian等无向连通图判断方法。本实施例为了增加有效监测时间段判别的可靠性,要求有效监测时间段内有效观测值的数量大于该时间段内SAR影像的数量,且SAR影像数量≥3,即得到对应的子相干相位矩阵Cs;否则,该监测时段内干涉相位为无效干涉相位。
其中,s为子监测时间段的序号,取值为[1,S]。假设第m至n景影像为获取的子监测时间段,子监测时间段的相干相位矩阵
若当前相干像素点对应的相干相位矩阵,在任意监测时间段内都存在有效干涉相位,则当前相干像素点为永久相干像素点。
在一实施例中,对所确定的所述临时相干像素点进行相位解缠,得到所述临时相干像素点的相位解缠序列,包括:
对临时相干像素点进行以下遍历:
计算当前临时相干像素点与预先获取的参考像素点的相位序列差值,即得到弧段相位序列。
具体包括:选取当前临时相干像素点周边的永久散射体像素点或者同分布相干像素点作为预先获取的参考像素点。本实施例中,选取参考像素点的依据为空间距离和参考像素点的质量的双重阈值,参考像素点的质量主要为永久散射体像素点的振幅离差值或同分布目标点的相干系数。
通过以下公式计算当前临时相干像素点与预先获取的参考像素点的相位序列差值:
其中,
对弧段相位序列进行时间域的相位解缠,得到解缠后的弧段时序相位。
具体包括:估算弧段相位序列对应的高程误差差值ΔE
本实施例采用时间相干系数作为选取有效弧段的质量标准,通过最大化时间时间相干系数γ可计算该对应的高程误差差值的估计值
其中,
将所估算的弧段相位序列对应高程误差差值和线性变形速率差值与预先获取的参考像素点的高程误差和变形速率相加,得到当前临时相干像素点的高程误差
若有效弧段的数量为多个,则可以得到当前临时相干像素点对应的多个高程误差和线性变形速率。本实施例采用中值法获得当前临时相干像素点对应的高程误差和线性变形速率。
假设当前临时相干像素点对应的有效弧段数量为H,则当前临时相干像素点点的高程误差
将当前临时相干像素点点的高程误差和线性变形速率与预先获取的参考像素点的高程误差和变形速率相减,得到弧段高程误差
将弧段高程误差和弧段线性变形速率对应的相位从弧段相位序列中去除,得到残余弧段时序相位。
在本实施例中,将弧段高程误差和弧段线性变形速率对应的相位从弧段相位序列中去除,获取的残余弧段时序相位
其中,
在一实施例中,对解缠后的弧段时序相位进行空间域的相位解缠,得到当前临时相干像素点的相位解缠序列,还包括:
若预先获取的参考像素点的数量为多个,则可以得到当前临时相干像素点对应的多个相位解缠序列;本实施例基于预先获取的多个参考像素点,可获得H个临时相干像素点对应的相位解缠序列。
若H个相位解缠序列全部相等,则所述当前临时相干像素点为可信监测点;
若H个相位解缠序列部分相等,且相等的相位解缠序列的数量大于不相等的相位解缠序列的数量,则所述当前临时相干像素点为可信监测点;
否则,当前临时相干像素点为不可信监测点。
本实施例根据雷达卫星入射波波长,可将可信监测点的解缠后的相位序列转换为变形序列d。
由于临时相干像素点对应的变形序列存在间断性,临时相干时间段间无法进行变形量传递,导致无法获取其累计变形量。
本实施例首先计算临时相干像素点与周边最近的参考像素点的变形序列差值Δd(弧段变形序列),然后对第一个有效监测时间段内弧段变形序列进行线性或指数函数拟合,计算函数多项式系数。对于滑坡体监测,本发明采用线性函数拟合方式。对于填海区沉降监测,根据软状土固结特点,本发明采用指数函数拟合方式。根据上述拟合多项式,预测第二个有效监测时间段起始时间的变形量。然后,依次进行拟合和预测。最终,获得弧段累计变形序列。将弧段累计变形序列与周边最近参考点的变形序列相加,即可获得临时相干像素点对应的累计变形序列。根据其累计变形序列,可观测临时相干像素点的累计变量。
请参考图2,图2为一种实施例的基于临时相干散射体的InSAR测量装置的结构示意图,包括:获取模块10、干涉处理模块20、临时相干像素点提取模块30、相位解缠模块40、变形序列确定模块50和累计变形序列确定模块60。
其中,获取模块10用于获取待监测区域的SAR影像序列,所述SAR影像序列包括连续监测时间的多景SAR影像。
干涉处理模块20用于对SAR影像序列中每两景SAR影像进行干涉处理,得到多个干涉图。
临时相干像素点提取模块30用于根据多个所述干涉图,确定SAR影像中的临时相干像素点和永久相干像素点。
相位解缠模块40用于对所确定的临时相干像素点进行相位解缠,得到所述临时相干像素点的相位解缠序列。
变形序列确定模块50用于将相位解缠序列转换为所述临时相干像素点的变形序列,临时相干像素点的变形序列用于表现SAR影像中临时相干像素点的变形情况。
累计变形序列确定模块60用于基于所述临时相干像素点的变形序列,拟合获取所述临时相干像素点的累计变形序列,其中临时相干像素点的累计变形序列用于监测该临时相干像素点的累计变形量。
需要说明的是,本实施例中的装置模块与上述实施例的方法步骤相对应,其具体实施方式已在上述实施例具体说明,此处不再赘述。
本实施例以某滑坡体为例进行实验,经资料分析和调查,该边坡在水库蓄水后,变形持续发展,且随时间呈增大趋势。采用Sentinel-1影像数据为测试数据,影像空间分辨率为方位向20m×距离向5m,运行波段为C波段,影像拍摄时间范围为2018年3月8日至2019年7月1日,影像采集频率为12天1景。
首先采用传统的时序InSAR分析方法获取果卜边坡表面的变形监测结果,如图3所示,提取的监测点类型包括永久散射体和同分布目标散射体。分析监测结果可知,基于Sentinel-1卫星影像,可以在果卜边坡表面获取一定数量的变形监测点,且周边监测点变形速率较大,最大变形速率为-282.2mm/yr,位于边坡顶部位置。分析发现,果卜边坡中间部位由于变形速率过大导致干涉图出现了失相干,无法获取有效的变形监测点。
本实施例再采用临时相干散射体干涉测量技术对Sentinel-1卫星影像进行数据处理,获取滑坡体的变形监测结果。如图4所示,图4为利用临时相干像素点的InSAR测量方法获取的监测点变形速率。相比图3中的传统数据处理结果,本发明实施例可在边坡变形速率较大的中间部位获取较多的监测点,在边坡体表面监测点数量可提升323%。边坡表面监测点变形速率较大,最大变形速率为-372.2mm/yr,位于边坡中间部位。分析可知,对于变形速率过大而出现失相干的区域,本发明实施例能够获取更多的有效监测点,有助于快速变形边坡隐患点的识别。
本领域技术人员可以理解,上述实施方式中各种方法的全部或部分功能可以通过硬件的方式实现,也可以通过计算机程序的方式实现。当上述实施方式中全部或部分功能通过计算机程序的方式实现时,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器、随机存储器、磁盘、光盘、硬盘等,通过计算机执行该程序以实现上述功能。例如,将程序存储在设备的存储器中,当通过处理器执行存储器中程序,即可实现上述全部或部分功能。另外,当上述实施方式中全部或部分功能通过计算机程序的方式实现时,该程序也可以存储在服务器、另一计算机、磁盘、光盘、闪存盘或移动硬盘等存储介质中,通过下载或复制保存到本地设备的存储器中,或对本地设备的系统进行版本更新,当通过处理器执行存储器中的程序时,即可实现上述实施方式中全部或部分功能。
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
- 基于临时相干散射体的InSAR测量方法及装置、存储介质
- 基于旋转反射面和散射体的匀场消相干装置