一种计算机自动控制的用于原状冻土的取土钻装置及其使用方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及冻土取样技术领域,特别是涉及一种计算机自动控制的用于原状冻土的取土钻装置。
背景技术
冻土是指零摄氏度以下,并含有冰的各种岩石和土壤。分布在中国多年冻土又可分为高纬度多年冻土和高海拔多年冻土,前者分布在东北地区,后者分布在西部高山高原及东部一些较高山地(如大兴安岭南端的黄岗梁山地、长白山、五台山、太白山);原状冻土即在取样时对土的结构及力学性质扰动较小的天然冻土。
冻土一般可分为短时冻土/季节冻土以及多年冻土。冻土具有流变性,其长期强度远低于瞬时强度特征。正由于这些特征,在冻土区修筑工程构筑物就必须面临两大危险:冻胀和融沉。随着气候变暖,冻土在不断退化。因此,对冻土的物理力学性质的研究一直是我国十分重视的课题。
目前,常用的取土器一般为环刀或原状取土管,采用环刀对土壤进行取样时,需在环刀内部涂抹一层凡士林,然后在取样地表先挖掘剖面坑,存在着操作复杂、劳动强度大、取土效率低等缺点,此外,钻取原状土的过程中产生热量、会对冻土产生热扰动;钻取完成后向上提起钻头,用侧壁的摩擦力拉断钻芯试样,导致试样底部的断裂位置不准确,各个钻芯试样不能够精准控制,会对冻土产生一定程度的扰动,影响冻土的物理性质。
发明内容
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种计算机自动控制的用于原状冻土的取土钻装置,用于解决现有技术中操作复杂、劳动强度大、取土效率低、对冻土产生热扰动;试样底部的断裂位置不准确,各个钻芯试样不能够精准控制,会对冻土产生一定程度的扰动,影响冻土的物理性质的问题。
为实现上述目的及其他相关目的,本发明提供一种计算机自动控制的用于原状冻土的取土钻装置,包括:机架、升降机构、驱动机构、安装机构和取土机构,所述升降机构、驱动机构分别设置在机架的顶面两端上,所述安装机构贯穿机架分布,所述取土机构设置在安装机构的底端上;
所述安装机构包括套筒、内杆和单向轴承,所述套筒贯穿机架分布,所述内杆转动设置在套筒内,所述单向轴承设置在套筒、内杆的顶端之间,所述升降机构能够带动套筒上下移动,所述驱动机构能够带动内杆在套筒内旋转;
所述取土机构包括外筒、内筒和钻头,所述外筒固定在套筒的底端上,所述内筒固定在内杆的底端上,且内筒位于外筒的内部,所述钻头设置在外筒的底端上;
所述内筒的底端开设有环形槽,所述环形槽内设有切割件,所述切割件具有第一端和第二端,所述第一端固定在内筒的内壁上,所述第二端固定在外筒的内壁上,所述内筒能够带动第一端相对于第二端移动,以使切割件环向切割所述内筒内部的原状土。
优选的,所述切割件采用韧性钢丝,所述韧性钢丝的内侧沿长度方向均匀设有多个突刺,所述内筒上设有导向轮,所述韧性钢丝靠近第二端的位置处紧贴导向轮分布。
优选的,所述外筒的内壁且对应环形槽的位置处开设有凹槽,所述凹槽内设有挂钩,所述第二端固定在挂钩上。
优选的,所述内筒的内部设有隔热层和管体,所述管体的内壁和内筒的内壁为同一个圆柱面,所述隔热层包裹在管体的外侧。
优选的,所述隔热层采用真空多孔保温材质,所述管体采用PVC管,所述隔热层的两端分别突出于PVC管的两端。
优选的,所述升降机构包括第一驱动件、第一齿轮、第二齿轮和螺母,所述第一驱动件固定在机架上,所述第一齿轮固定在第一驱动件的输出轴上,所述螺母通过轴承转动设置在机架上,所述螺母和套筒螺纹连接,所述第二齿轮设置在螺母的外围上,且第一齿轮、第二齿轮互相啮合。
优选的,所述驱动机构包括第二驱动件、传动组件、花键轴和第三齿轮,所述第二驱动件设置在机架上,所述花键轴通过轴承设置在机架上,且花键轴和机架的顶面互相垂直,所述传动组件设置在第二驱动件的输出轴和花键轴的底端之间,所述第三齿轮设置在内杆的顶端上,且第三齿轮和花键轴互相啮合。
优选的,所述传动组件包括第一带轮、第二带轮和传动带,所述第一带轮固定在第二驱动件的输出轴上,所述第二带轮固定在花键轴的底端上,所述传动带设置在第一带轮、第二带轮之间。
优选的,所述机架的底面设有至少三个支腿,所述支腿的底端设有行走轮。
此外,本发明还公开了一种用于原状冻土取土钻装置的使用方法,包括:
下降钻土作业:启动第一驱动件,所述第一驱动件的输出轴带动第一齿轮旋转,所述第一齿轮带动第二齿轮旋转,所述第二齿轮带动螺母旋转,所述螺母带动套筒向下移动,所述套筒带动内杆、取土机构向下移动以钻取原状土;
切割作业:启动第二驱动件,所述第二驱动件的输出轴带动第一带轮旋转,所述第一带轮通过传动带带动第二带轮旋转,所述第二带轮带动花键轴旋转,所述花键轴通过第三齿轮带动内杆旋转,所述内杆带动内筒旋转,所述内筒拉动第一端相对于第二端回转移动,使得切割件沿径向缩小,所述切割件带动多个突刺向内移动,从而切割内筒内的原状土;
提升取土作业:启动第一驱动件并使第一驱动件的输出轴反方向旋转,所述第一驱动件的输出轴带动第一齿轮旋转,所述第一齿轮带动第二齿轮旋转,所述第二齿轮带动螺母反方向旋转,所述螺母带动套筒向上移动,所述套筒带动内杆、取土机构向上移动以便于取出原状土;在提升过程中,所述第二驱动件驱动内杆旋转,且内杆和套筒旋转方向和旋转速度相同。。
如上所述,本发明的计算机自动控制的用于原状冻土的取土钻装置,至少具有以下有益效果:
1、使用时,启动第一驱动件,第一驱动件的输出轴带动第一齿轮旋转,第一齿轮带动第二齿轮旋转,第二齿轮带动螺母旋转,螺母带动套筒向下移动,套筒带动内杆、取土机构向下移动以钻取原状土,采用第一驱动件来提供动力,减轻劳动强度,提高作业效率;
2、启动第二驱动件,第二驱动件的输出轴带动第一带轮旋转,第一带轮通过传动带带动第二带轮旋转,第二带轮带动花键轴旋转,花键轴通过第三齿轮带动内杆旋转,内杆带动内筒旋,内筒拉动第一端相对于第二端回转移动,使得切割件沿径向缩小,切割件带动多个突刺向内移动,从而切割内筒内的原状土,确保试样底部的断裂位置精确,各个钻芯试样能够精准控制,消除对冻土产生的扰动,利于试验;
3、真空多孔保温材质可以适当阻挡钻土时产生的热量,降低对冻土的热扰动,确保后续冻土试验的精确性。
附图说明
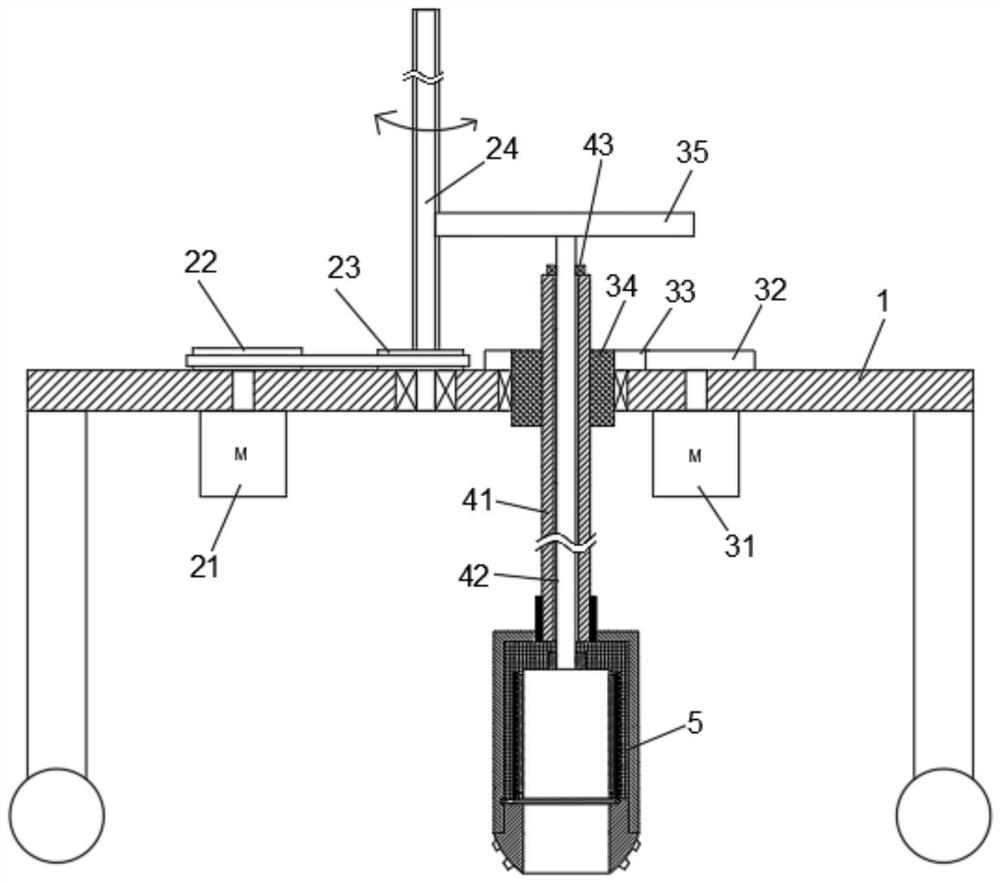
图1显示为本发明的计算机自动控制的用于原状冻土的取土钻装置的整体主剖视图。
图2显示为本发明的计算机自动控制的用于原状冻土的取土钻装置中取土机构的剖视图。
图3显示为本发明的计算机自动控制的用于原状冻土的取土钻装置中切割件位置处的俯剖视图。
图4显示为本发明的计算机自动控制的用于原状冻土的取土钻装置图2中A处放大图。
元件标号说明:机架1、第二驱动件21、第一带轮22、第二带轮23、花键轴24、第一驱动件31、第一齿轮32、第二齿轮33、螺母34、第三齿轮35、套筒41、内杆42、单向轴承43、取土机构5、外筒51、挂钩511、内筒52、隔热层521、管体522、环形槽523、导向轮524、钻头53、切割件54、第一端541、第二端542、突刺543、
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
请参阅图1至图4。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
以下各个实施例仅是为了举例说明。各个实施例之间,可以进行组合,其不仅仅限于以下单个实施例展现的内容。
请参阅图1,本发明提供一种计算机自动控制的用于原状冻土的取土钻装置,包括:机架1、升降机构、驱动机构、安装机构和取土机构5,升降机构、驱动机构分别设置在机架1的顶面两端上,且升降机构、驱动机构分别位于安装机构的两侧,安装机构贯穿机架1分布,安装机构能够相对于机架1上下移动,取土机构5设置在安装机构的底端上,机架1的底面设有至少三个支腿,支腿的底端设有行走轮,至少三个支腿能够稳定的支撑起机架1,并且行走轮便于移动取土钻装置,从而改变取土的位置。
使用时,启动升降机构,升降机构带动安装机构向下移动,安装机构带动取土机构5向下移动,从而钻取土样,然后启动驱动机构,驱动机构带动花键轴24、第三齿轮35和内杆42旋转,内杆42带动切割件54径向缩小,从而切割原状土。
请参阅图1,升降机构包括第一驱动件31、第一齿轮32、第二齿轮33和螺母34,第一驱动件31固定在机架1上,第一驱动件31采用电机,且电机通过导线和蓄电池电性连接,第一齿轮32通过键槽、键固定在第一驱动件31的输出轴上,螺母34通过轴承转动设置在机架1上,具体的,机架1上开设有安装通孔,安装通孔内设有轴承,轴承内腔里固定住螺母34,螺母34和套筒41之间采用螺纹连接,第二齿轮33固定设置在螺母34的外围上,且第一齿轮32、第二齿轮33互相啮合,第一齿轮32、第二齿轮33均采用圆柱直齿轮。
使用时,启动第一驱动件31,第一驱动件31的输出轴带动第一齿轮32旋转,第一齿轮32带动第二齿轮33旋转,第二齿轮33带动螺母34在轴承内旋转,在套筒41、螺母34之间螺纹连接的作用下,套筒41向下移动,从而为钻土提供动力,减轻劳动强度,提高作业效率,取土完毕后,启动第一驱动件31并使第一驱动件31的输出轴反向旋转,第一驱动件31的输出轴通过第一齿轮32、第二齿轮33带动螺母34反向旋转,进而使套筒41向上移动,以把土样向上提起取出。
请参阅图1,驱动机构包括第二驱动件21、传动组件、花键轴24和第三齿轮35,第二驱动件21设置在机架1上,第二驱动件21采用电机,花键轴24通过轴承设置在机架1上,且花键轴24和机架1的顶面互相垂直,传动组件设置在第二驱动件21的输出轴和花键轴24的底端之间,第三齿轮35设置在内杆42的顶端上,且第三齿轮35和花键轴24互相啮合,第三齿轮35采用圆柱直齿轮,具体的,传动组件包括第一带轮22、第二带轮23和传动带,第一带轮22固定在第二驱动件21的输出轴上,第二带轮23固定在花键轴24的底端上,且第一带轮22、第二带轮23距离机架1的顶面均留有预定的距离,传动带设置在第一带轮22、第二带轮23之间,此外,传动组件还可以采用链轮、链条结构。
使用时,启动第二驱动件21,第二驱动件21的输出轴带动第一带轮22旋转,第一带轮22通过传动带来带动第二带轮23旋转,第二带轮23带动花键轴24在轴承内旋转,花键轴24带动第三齿轮35旋转,第三齿轮35带动内杆42发生旋转,从而为切割原状土提供动力,机械化作业能够减轻劳动强度、提高作业效率。
请参阅图1,安装机构包括套筒41、内杆42和单向轴承43,套筒41贯穿机架1分布,套筒41的顶端、底端分别延伸到机架1的上下两侧,内杆42转动设置在套筒41内,且套筒41、内杆42的轴线重合,单向轴承43设置在套筒41、内杆42的顶端之间,具体的,单向轴承43的内圈和内杆42固定连接,单向轴承43的外圈和套筒41固定连接,套筒41的外表面设有外螺纹,使得套筒41和螺母34螺纹连接,升降机构能够带动套筒41上下移动,驱动机构能够带动内杆42在套筒41内旋转。
使用时,内杆42能够在套筒41内相对旋转,其中,内杆42能够带动内筒52旋转,从而为切割原状土提供动力,此外,单向轴承43能够支持内杆42相对于套筒41的单向旋转,从而适应钻土、切割原状土一体化设置,结构紧凑巧妙、功能多样化。
请参阅图2-4,取土机构5包括外筒51、内筒52和钻头53,外筒51固定在套筒41的底端上,内筒52固定在内杆42的底端上,且内筒52位于外筒51的内部,外筒51、内筒52的轴线重合,钻头53设置在外筒51的底端上,钻头53呈倒锥形结构,以利于钻取土壤;内筒52的底端开设有环形槽523,且环形槽523沿着内筒52的周向分布,环形槽523内设有切割件54,环形槽523用于容纳切割件54,避免切割件54向内突出于内筒52的内壁,利于原状土进入到内筒52的内部,其中,切割件54采用至少1/2圆弧形结构,由于圆弧越小切割深度越深,大于1/2圆弧形接近整圆时切割最浅,从而确保切割件54具有较大的切割深度,利于原状土的断开,切割件54具有第一端541和第二端542,第一端541固定在内筒52的内壁上,第二端542固定在外筒51的内壁上,第一端541和第二端542之间留有预定的距离作为外筒51、内筒52之间的相对转动行程,具体的,外筒51的内壁且对应环形槽523的位置处开设有凹槽,凹槽内设有挂钩511,第二端542固定在挂钩511上,内筒52能够带动第一端541相对于第二端542移动,以使切割件54环向切割内筒52内部的原状土。
切割件54采用韧性钢丝,韧性钢丝的内侧沿长度方向均匀设有多个突刺543,突刺543采用三角形结构,内筒52上设有导向轮524,韧性钢丝靠近第二端542的位置处紧贴导向轮524分布。
使用时,内杆42带动内筒52相对于外筒51旋转,内筒52拉动第一端541相对于第二端542回转移动,从而使切割件54径向缩小,具体的,韧性钢丝的径向缩小带动多个突刺543朝向内筒52的轴线移动,从而环向切割内筒52内部的原状土,减少原状土侧壁的局部强度,当向上提升原状土时,由于原状土在其被切割处强度较弱,能够从切割处被拉断,确保试样底部的断裂位置精确,各个钻芯试样能够精准控制,消除对冻土产生的扰动,利于后续冻土试验,此外,导向轮524能够支撑起韧性钢丝,避免韧性钢丝发生突变折弯断裂。
请参阅图2、4,内筒52的内部设有隔热层521和管体522,管体522的内壁和内筒52的内壁为同一个圆柱面,避免管体522的内壁突出于内筒52的内壁,确保原状土顺利进入到管体522的内部,隔热层521包裹在管体522的外侧,具体的,隔热层521采用真空多孔保温材质,真空多孔保温材质可以适当阻挡钻土时产生的热量,降低对冻土的热扰动,确保后续冻土试验的精确性,管体522采用PVC管,PVC管的内壁和原状土之间的摩擦力小,便于取出原状土,隔热层521的两端分别突出于PVC管的两端,进一步改善隔热效果。
此外,本发明还公开了一种用于原状冻土取土钻装置的使用方法,包括:
下降钻土作业:启动第一驱动件31,第一驱动件31的输出轴带动第一齿轮32旋转,第一齿轮32带动第二齿轮33旋转,第二齿轮33带动螺母34旋转,螺母34带动套筒41向下移动,套筒41带动内杆42、取土机构5向下移动以钻取原状土;
切割作业:启动第二驱动件21,第二驱动件21的输出轴带动第一带轮22旋转,第一带轮22通过传动带带动第二带轮23旋转,第二带轮23带动花键轴24旋转,花键轴24通过第三齿轮35带动内杆42旋转,内杆42带动内筒52旋转,内筒52拉动第一端541相对于第二端542回转移动,使得切割件54沿径向缩小,切割件54带动多个突刺543向内移动,从而切割内筒52内的原状土;
提升取土作业:启动第一驱动件31并使第一驱动件31的输出轴反方向旋转,第一驱动件31的输出轴带动第一齿轮32旋转,第一齿轮32带动第二齿轮33旋转,第二齿轮33带动螺母34反方向旋转,螺母34带动套筒41向上移动,套筒41带动内杆42、取土机构5向上移动以便于取出原状土;在提升过程中,所述第二驱动件21驱动内杆42旋转,且内杆42和套筒41旋转方向和旋转速度相同。保持旋转同向和转速相同的目的在于:由于在取土钻在下降过程中内杆42和套筒41是处于啮合(此时单向轴承保持传动连通)同步转动的;当上升时,驱动套筒41反向转动,此时内杆42和套筒41不啮合(此时单向轴承未保持传动),为了避免内杆42和套筒41在提升时产生相对转动而导致切割件54被拉断,故此处控制杆42和套筒41旋转方向和旋转速度相同。
综上所述,本发明使用时,启动第一驱动件31,第一驱动件31的输出轴带动第一齿轮32旋转,第一齿轮32带动第二齿轮33旋转,第二齿轮33带动螺母34旋转,螺母34带动套筒41向下移动,套筒41带动内杆42、取土机构5向下移动以钻取原状土,采用第一驱动件31来提供动力,减小劳动强度,提高作业效率;启动第二驱动件21,第二驱动件21的输出轴带动第一带轮22旋转,第一带轮22通过传动带带动第二带轮23旋转,第二带轮23带动花键轴24旋转,花键轴24通过第三齿轮35带动内杆42旋转,内杆42带动内筒52旋转,内筒52拉动第一端541相对于第二端542回转移动,使得切割件54沿径向缩小,切割件54带动多个突刺543向内移动,从而切割内筒内的原状土,确保试样底部的断裂位置精确,各个钻芯试样能够精准控制,消除对冻土产生的扰动,利于试验;真空多孔保温材质可以适当阻挡钻土时产生的热量,降低对冻土的热扰动,确保后续冻土试验的精确性。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种计算机自动控制的用于原状冻土的取土钻装置及其使用方法
- 一种计算机自动控制的用于原状冻土的取土钻装置