目标速度未知时的FDA-MIMO雷达检测方法与系统
文献发布时间:2023-06-19 12:13:22
技术领域
本发明属于信号检测技术领域,更具体地,涉及一种目标速度未知时的FDA-MIMO雷达检测方法与系统。
背景技术
不断提高目标探测性能,一直是雷达设计师不懈的追求。为了实现这一目标,需要挖掘尽量多的可用信息。近年来,两种新体制雷达受到学术界和工业界越来越多的关注,分别是多输入多输出(MIMO)雷达和频率分集阵列(FDA)雷达。相比于传统相控阵雷达,MIMO雷达的每个天线均发射独立的波形,实现了波形分集,从而提高了系统自由度,具有等效阵列孔径大、目标参数识别强、难以被侦察和干扰、弱小目标检测性能良好等优点。FDA雷达的不同阵元的发射信号载频均相差一定的数值,使得雷达发射方向图是距离-角度-时间的三维函数,增加了系统可控自由度,具有欺骗干扰抑制、距离模糊杂波抑制等优点。把FDA与MIMO技术结合,形成FDA-MIMO雷达,可极大扩展系统自由度,提高信号处理灵活性,进一步提升雷达目标探测性能。
雷达探测的目标大多数为非合作目标,因此,目标的方位、距离、速度等信息往往未知。为了实现对未知目标的检测,最常用的办法是基于搜索的思想,即把整个参数空间划分为小的单元,逐个距离-方位-多普勒单元进行检测,当给定的距离-方位-多普勒单元的信号输出值大于门限时,则判定该单元有目标,为后续精确估计目标参数提供了铺垫。然而,由于FDA-MIMO雷达系统自由度高,若在整个参数空间逐一进行搜索,则实现复杂度过高。
文献L. Lan, A. Marino, A. Aubry, A. De Maio, G. Liao, J. Xu, and Y.Zhang,“GLRT-based adaptive target detection in FDA-MIMO radar,”IEEETransactions on Aerospace and Electronic Systems, vol. 57, no. 1, pp.597–613, 2021.基于广义似然比(GLRT)准则,提出了未知杂波中适用于FDA-MIMO雷达的自适应检测方法,该检测方法假设目标的距离信息未知,通过半定规化、离散栅格搜索和牛顿法估计得到目标的距离信息,然而,该方法仅基于一个脉冲数据,未考虑目标的运动信息,在实际应用中势必会带来性能损失。文献R. Gui, W.-Q. Wang, and Z. Zheng, “Low-complexity GLRT for FDAradar without training data,” Digital SignalProcessing, vol. 107, p.102861, 2020.基于GLRT准则,提出了适用于FDA雷达的检测方法,然而,该检测方法未利用训练样本,检测性能有限。此外,上述文献均未得到检测器解析的检测门限计算方法,主要利用蒙特卡洛仿真获得检测门限,这对于多通道的雷达系统来说,运算量过高,尤其是在系统虚警概率较低的情形下。
发明内容
为了解决上述问题,本专利在给定的距离-方位单元进行目标检测,而假定目标速度未知,通过最大似然对目标速度进行估计,在降低运算复杂度的同时,未大幅度降低目标检测性能,并且得到了检测门限解析的计算方式,极大降低了运算复杂度。
为实现上述目的,按照本发明的一个方面,提供了一种目标速度未知时的FDA-MIMO雷达检测方法,包括以下步骤:
步骤1:构造数据矩阵,包括:待检测数据矩阵、训练样本矩阵和信号发射-接收导向矢量;其中, 所述构造的待检测数据矩阵、训练样本矩阵和信号发射-接收导向矢量分别表示为
其中,
和
符号
步骤2:根据所述数据矩阵构造中间变量;
步骤3:利用所述中间变量构造检测统计量;
步骤4:根据系统设定的虚警概率及系统维数确定检测门限;
步骤5:比较所述检测统计量与所述检测门限的大小,并判决目标是否存在。
优选地,所述步骤2中,根据所述数据矩阵构造的中间变量包括:
其中,上标
优选地,所述步骤3中,根据所述中间变量构造的检测统计量为:
优选地,所述步骤4中,根据系统设定的虚警概率及系统维数确定的检测门限通过求解下式所示的初等方程得到
其中,
优选地,所述步骤5中,比较所述检测统计量与所述检测门限的大小,并判决目标是否存在,分下述两种情况进行判定:
若检测统计量大于等于检测门限
若检测统计量
按照本发明的另一方面,提供了一种目标速度未知时的FDA-MIMO雷达检测系统,包括数据构造模块、中间变量构造模块、检测统计量构造模块、检测门限确定模块和目标判决模块,其中:
所述数据构造模块,用于构造数据矩阵,包括:待检测数据矩阵、训练样本矩阵和信号发射-接收导向矢量;其中, 所述构造的待检测数据矩阵、训练样本矩阵和信号发射-接收导向矢量分别表示为
其中,
和
符号
所述中间变量构造模块,用于根据所述数据矩阵构造中间变量;
所述检测统计量构造模块,用于利用所述中间变量构造检测统计量;
所述检测门限确定模块,用于根据系统设定的虚警概率及系统维数确定检测门限;
所述目标判决模块,用于比较所述检测统计量与所述检测门限的大小,并判决目标是否存在。
优选地,根据所述数据矩阵构造的中间变量包括:
其中,上标
根据所述中间变量构造的检测统计量为:
优选地,所述检测门限确定模块根据系统设定的虚警概率及系统维数确定的检测门限通过求解下式所示的初等方程得到
其中,
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有如下有益效果:
(1)本发明设计的FDA-MIMO雷达检测方法一体化实现了杂波抑制、信号积累和恒虚警处理,无需独立的杂波抑制步骤和恒虚警处理步骤,简化了检测流程;所述步骤3给出了自适应检测器的检测统计量
(2)本发明设计的FDA-MIMO雷达检测方法得到了检测器解析检测门限的计算方法,进一步降低了实现复杂度;所述步骤4中给出了虚警概率与检测门限之间的关系表达式:
(3)本发明设计的FDA-MIMO雷达检测方法实现了复杂度和检测性能的折中,在降低复杂度的同时,能够保证较好的检测性能;在步骤2中,通过构造中间变量
附图说明
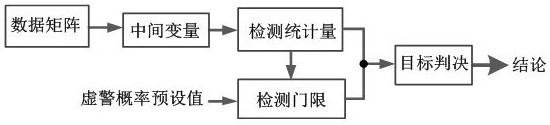
图1为本发明提供的目标速度未知时的FDA-MIMO雷达检测方法的流程示意图;
图2为本发明提供的目标速度未知时的FDA-MIMO雷达检测系统的结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
假设FDA-MIMO雷达系统的发射阵元数为
其中,
其中,
和
符号
令杂波和热噪声分量之和
其中,
本发明的目的在于解决目标速度未知时的FDA-MIMO雷达目标检测问题。为实现上述目的,请参阅图1所示,本发明提供了目标速度未知时的FDA-MIMO雷达检测方法,包括以下步骤:
步骤1:构造数据矩阵,包括:待检测数据矩阵、训练样本矩阵和信号发射-接收导向矢量;
具体地,所述构造的待检测数据矩阵、训练样本矩阵和信号发射-接收导向矢量分别表示为
其中,
和
符号
步骤2:根据所述数据矩阵构造中间变量;
具体地,根据所述数据矩阵构造的中间变量包括:
其中,上标
步骤3:利用所述中间变量构造检测统计量;
具体地,根据所述中间变量构造的检测统计量为:
步骤4:根据系统设定的虚警概率及系统维数确定检测门限;
具体地,根据系统设定的虚警概率及系统维数确定的检测门限通过求解下式所示的初等方程得到
其中,
步骤5:比较所述检测统计量与所述检测门限的大小,并判决目标是否存在;
具体地,比较所述检测统计量与所述检测门限的大小,并判决目标是否存在,分下述两种情况进行判定:
若检测统计量
若检测统计量
如图2所示,本发明还提供了目标速度未知时的FDA-MIMO雷达检测系统,包括数据构造模块、中间变量构造模块、检测统计量构造模块、检测门限确定模块和目标判决模块,其中:
所述数据构造模块,用于构造数据矩阵,包括:待检测数据矩阵、训练样本矩阵和信号发射-接收导向矢量;
具体地,所述构造的待检测数据矩阵、训练样本矩阵和信号发射-接收导向矢量分别表示为
其中,
和
符号
所述中间变量构造模块,用于根据所述数据矩阵构造中间变量;
具体地,根据所述数据矩阵构造的中间变量包括:
其中,上标
根据所述中间变量构造的检测统计量为:
所述检测门限确定模块,用于根据系统设定的虚警概率及系统维数确定检测门限;
具体地,根据系统设定的虚警概率及系统维数确定的检测门限通过求解下式所示的初等方程得到
其中,
所述目标判决模块,用于比较所述检测统计量与所述检测门限的大小,并判决目标是否存在;
具体地,比较所述检测统计量与所述检测门限的大小,并判决目标是否存在,分下述两种情况进行判定:
若检测统计量
若检测统计量
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 目标速度未知时的FDA-MIMO雷达检测方法与系统
- 目标速度未知时的FDA-MIMO雷达检测方法与系统