一种非视域目标探测中基于神经网络的快速定位方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于光电探测领域,具体涉及一种非视域目标探测中基于神经网络的快速定位方法。
背景技术
非视域探测技术是一种能够对被遮挡物体或场景进行探测、跟踪的技术,可以通过这项技术延展我们人类的视域范围。未来,将有可能应用于安全自动驾驶、危险情况救援及机器人视觉等领域,且都有重要的意义。目前已成为国内外研究的热点。与传统光学探测技术有所不同,传统光学探测技术只能够对视线范围内的物体进行探测。如果目标发生遮挡,传统光学探测技术将无法探测。
该技术主要采取主动探测的方式,发射一束脉冲激光到中介面,激光在中介面会发生漫反射,一部分激光直接返回探测器并被收集到,称为中介面回波,一部分漫反射后的激光打在非视域目标上并发生第二次漫反射到中介面上,此时中介面上将发生第三次漫反射,发生第三次漫反射后返回的光子被探测器收集到,称为目标散射回波,由此测量出光子的到达时间,从而解算出非视域目标的信息。然而,在解算过程中传统方法运算量大,运算时间长,严重影响非视域目标探测的实时性。
在目前的文献中,传统的椭圆解算非视域目标位置的方法,是将目标散射回波信号看作非视域目标存在的概率分布,将目标散射回波信号通过非视域椭圆物理模型映射到非视域,再计算出非视域中联合概率密度的最大值,并认为这一点就是非视域目标的位置。这种方法需要将全部的波形映射到非视域二维空间中,映射到非视域过程中运算量较大,影响非视域目标探测的实时性。往往将目标回波投影到非视域后,往往非视域中联合概率密度在较大邻域内比较相近,导致定位精度低。并且由于实验中对探测点和激光器的标校不准确,也会造成非视域目标定位的误差。总之,传统的椭圆解算非视域目标位置的方法运算量大,精度低,影响非视域目标探测的实时性和准确性。
发明内容
本发明解决的技术问题:针对传统非视域目标定位方法运算量大,精度低的问题,提供一种非视域目标探测中基于神经网络的快速定位方法。本发明在非视域目标回波的光子达到时间直方图信号中,对中介面回波和目标散射回波信号分别提取其特征点,并使用神经网络对特征点之间的距离与非视域目标空间位置的关系进行建模,从而快速地解算出非视域目标的空间位置信息。
本发明采用以下技术方案:一种非视域目标探测中基于神经网络的快速定位方法,该方法包括以下步骤:
步骤1、在非视域目标回波的光子到达时间直方图信号中,对中介面回波与目标散射回波信号分别提取其特征点,并计算特征点之间的距离;
步骤2、将针对多个探测点计算出的特征点之间的距离作为输入数据,将当前非视域目标的空间位置作为目标值;
步骤3、在非视域目标的不同位置重复步骤1~2,收集若干组数据;
步骤4、使用神经网络对所述特征点之间的距离与所述非视域目标空间位置的关系进行建模,学习出神经网络的参数;
步骤5、使用建立的模型对未知非视域目标进行定位。
进一步的,步骤1中,所述对中介面回波和目标散射回波信号分别提取其特征点的方法为:提取中介面回波信号的峰值点作为中介面回波信号的特征点,并提取目标散射回波信号的峰值点作为目标散射回波信号的特征点。
进一步的,步骤4中,所述利用神经网络对特征点之间的距离与非视域目标空间位置的关系进行建模的方法为:将多路回波信号中特征点之间的距离作为输入数据,并将当前非视域目标的空间位置作为目标值,建立前馈神经网络模型,再通过反向传播算法学习出神经网络的参数,从而完成建模。
进一步的,对目标散射回波信号提取特征点前,对直方图信号的中介面回波置零并进行滤波。
本发明与现有技术相比的有益效果在于:
(1)本发明方法可以提高非视域目标定位精度;
(2)提升非视域目标定位的抗噪性能;
(3)有利于提高非视域目标探测的实时性。
图面说明
图1是实施例中非视域目标实验中采集到的背景直方图信号;
图2是实施例中非视域目标实验中经过信号处理的光子到达时间直方图信号;
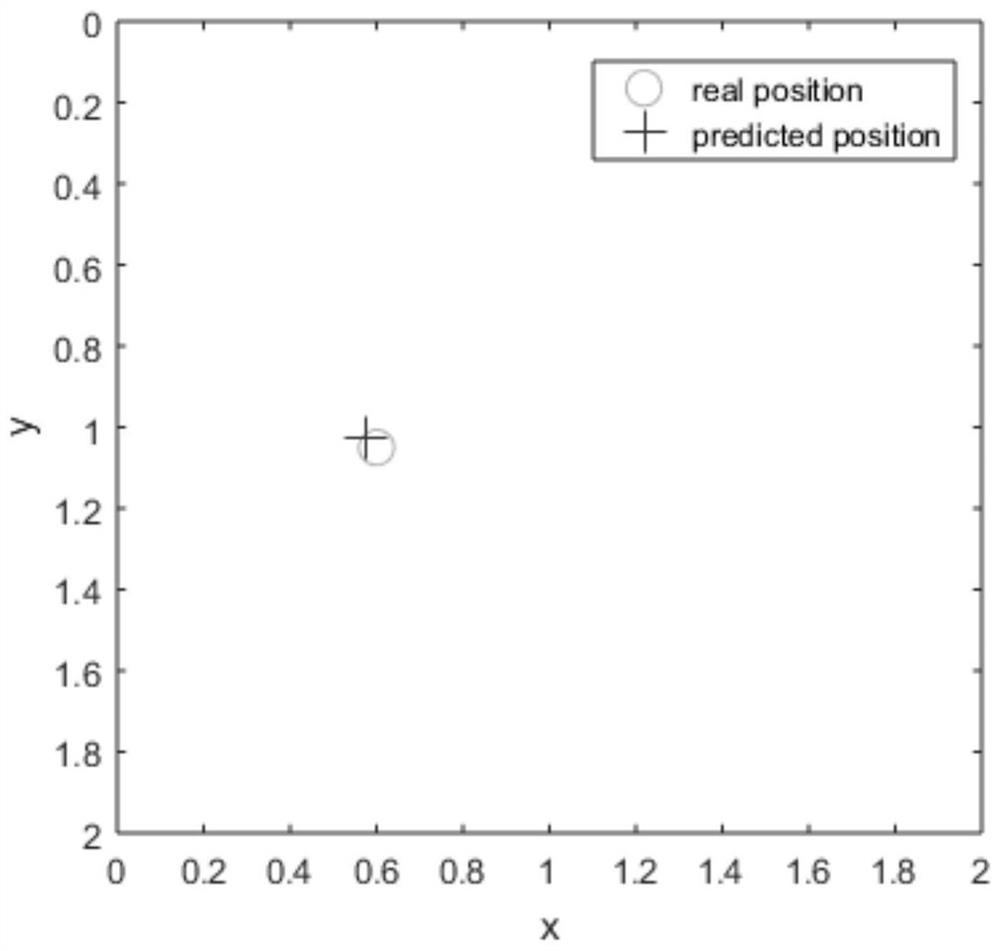
图3是实施例中使用神经网络模型进行非视域目标定位的结果。
具体实施方式
以下是本发明的具体实施办法。但以下的实施例仅限于解释本发明,本发明的保护范围应包括权利要求的全部内容,而且通过以下实施例对该领域的技术人员即可以实现本发明权利要求的全部内容。
本实施例在三个不同探测点来接收非视域目标返回的光子到达时间直方图信号,并对三路直方图信号中特征点之间的距离和非视域目标的空间位置的关系进行建模。本实施例通过仿真产生用于建模的数据集,并使用实验数据进行验证,但不限于使用仿真数据建模。本发明基于神经网络的快速定位方法具体步骤如下:
步骤1、在非视域目标回波的光子到达时间直方图信号中,对中介面回波与目标散射回波信号分别提取其特征点,并计算特征点之间的距离。
设中介面上激光点的位置为坐标系原点,即(0,0,0),x方向表示非视域场景中水平方向,y方向表示非视域场景中的z=0平面上与x轴垂直的方向,z方向表示非视域场景中竖直高度的方向。探测点在中介面的位置为:(-0.218,0,0)、(-0.373,0,0)、(-0.523,0,0)。以第一个探测点为例,特征点之间的距离的计算公式如下:
其中,x,y分别为非视域目标位置的横纵坐标,d
步骤2、将多个探测点计算出的特征点之间的距离作为输入数据,将当前非视域目标的空间位置作为目标值。符号表示如下:
d(x,y)=(d
Y(d)=[x,y]
其中,x,y分别为非视域目标位置的横纵坐标,d为特征点之间的距离d
步骤3、重复步骤1~2,在非视域目标的不同位置处收集若干组数据。
步骤4、使用神经网络对特征点之间的距离与非视域目标空间位置的关系进行建模,学习出神经网络的参数。
本实施例建立了一个包含3个输入层,10个隐藏层和2个输出层的前馈神经网络,三个输入分别为三个探测点的特征点之间的距离:d
F(d)=w
σ(x)=1/(1+e
其中,F为前馈神经网络的输出,d为三个探测点的特征点之间的距离,σ为sigmoid函数,w
步骤5、使用建立的模型对未知非视域目标进行定位。
图1为非视域目标探测实验中三个探测点采集到的背景直方图信号,其中回波为中介面回波信号,分别提取中介面回波信号的峰值点,本实施例选择波峰的峰值点作为特征点,但不限于选择峰值点。三个中介面回波信号的特征点位置分别为9.24ns,13.84ns,3.92ns。然后,对存在非视域目标时采集到的直方图信号进行信号处理操作,对该信号的中介面回波置零,减去背景信号,并进行了高斯滤波,中介面回波置零与高斯滤波只是为了方便提取出特征点位置,不属于本发明的必要步骤。图2中的回波信号为目标散射回波信号,分别提取出特征点位置,为16.97ns,21.95ns,12.39ns,则三个探测点处的特征点之间的距离分别为7.73ns,8.11ns,8.47ns。将计算出的特征点之间的距离输入到训练好的神经网络模型中,得到非视域目标空间位置为(0.5729,1.0240),与实际位置相符,如图3所示。
本发明未详细阐述部分属于本领域技术人员的公知技术。