菌落挑选综合工作站及挑选方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明属于微生物培育技术领域,具体涉及一种微生物的选育改造过程中的克隆菌落挑取装置及方法。
背景技术
随着21世纪的到来,科学技术得到了迅猛的发展,各个领域都取得了很多重大的科研进展,其中生物技术尤其得到了长足的发展。微生物在各个行业都得到了大量运用,对微生物的选育改造过程中通常需要进行大量的克隆菌落挑取工作。菌落挑选综合工作站的主要作用是将培养皿中的菌落接种到培养皿中,进行后续的培养。
当前的菌落挑选机器人的主要工作过程是首先利用工业相机获取当前的菌落图像数据,然后利用计算机视觉技术分析计算出当前菌落的坐标信息以及数量信息,之后利用固定在移动机械臂上的针状金属挑取头来挑取目标,并将挑取菌落接种到96微孔板中,为了防止菌落互相干涉,还需要对于金属挑取头进行酒精消毒,并进行高温加热,以便为下次挑取做好准备。但是,当前技术下挑取菌落的效率比较低,其次由于挑针固定,然而培养基表面厚度不均匀的问题,会导致无法挑取到培养基表面的菌落,进而极大的降低了挑取效率。
发明内容
本发明针对当前存在的培养基厚度不均匀、进而导致挑针无法有效挑取菌落的技术问题,提供一种菌落挑选综合工作站及挑选方法,结构简单、方便操作,可以极大提高挑取效率,同时能够调高消毒酒精利用效率,以及对于金属挑针的杀毒效率。
为解决上述问题,本发明采用如下技术方案:
一种菌落挑选综合工作站,其特征在于至少包括:
视觉系统,包括设置在培养皿上方、用于获取菌落坐标和数量信息工业相机,并将培养皿中的当前菌落三维坐标和菌落数量信息传递给控制系统;
培养皿三坐标移动机构,驱动培养皿移动到指定位置;
金属挑针转盘机构,包括多个工位间隔设置的金属挑针,所述每一个金属挑针均能够移动到指定位置并使得挑针的下方正对培养皿以便挑取对应的菌落,同时每一个金属挑针也设置为在挑取菌落后能够移动到微孔板的接种点所在工位;
微孔板,设置在金属挑针转盘的接种点所在工位,通过振动机构带动微孔板振动而使得金属挑针上面的菌落与微孔板中的接种点的培养液接触,进而完成接种过程;
高压酒精消毒机构,设置在金属挑针转盘的消毒工位,以便接受下落的金属挑针完成消毒。
控制系统,主要核心为工控机,用于获取培养皿中的当前菌落三维坐标和菌落数量,控制金属挑针挑取对应的菌落,控制挑取的菌落移动接种到96微孔板,控制金属挑针进行酒精消毒。
上述技术方案中,工业相机固定设置,在竖直高度上位于培养皿的上方并处在培养皿三坐标移动机构的水平投影区域内。
上述技术方案中,金属挑针转盘机构包括一个设置有多个间隔工位的转动圆盘,各工位均固定一个金属挑针,各工位的金属挑针能够随转动圆盘旋转而在不同工位同步工作,转动圆盘设置为能够升降控制以根据需要选取菌落、接种或消毒。
上述技术方案中,各金属挑针与后端的工作气缸通过螺纹连接固定,通过控制工作气缸气阀的开关从而控制气缸的上下运动,进而完成金属挑针的上下运动。
上述技术方案中,培养皿三坐标移动机构中,三个伺服电机分别置于X.Y.Z三个方向以电机带动各方向丝杠完成直线运动而移动培养皿,且以丝杠上的中间传感器作为原点构建一个笛卡尔坐标系。
上述技术方案中,微孔板为96微孔板,所属振动机构为伺服电机,伺服电机带动96微孔板振动,使得金属挑针上面的菌落与96微孔板中的培养液接触。
上述技术方案中,高压酒精消毒机构包括与压缩喷射气缸相连通的酒精原料盒,连接处设置高压阀,压缩喷射气缸通过高压阀连接高压喷头,所述高压喷头对准从挑针插入口往下插入的金属挑针头,高压喷头和挑针插入口下方设置消毒废液出口。
上述技术方案中,高压酒精消毒机构旁还设置高温加热炉,高温加热炉位于金属挑针转盘机构下方的高温加热工位,并通过加热架支撑以承纳往下移动的金属挑针。
一种菌落挑选方法,其特征在于通过给予每个菌落一个三维坐标,并且通过培养皿运动到相应的位置供挑针挑取菌落,包括如下步骤:
S1:挑选前的准备工作,需要转运机器人或者是实验人员将培养皿以及微孔板放到对应的工位上;
S2:将培养皿移动至相机正下方,再对培养皿以及内部菌落拍照之后,通过内部菌落识别算法获取每个菌落的三维坐标;
S3:将获取的三维坐标信息传入工控机内部,之后对坐标进一步排序,然后利用培养皿三坐标移动机构的电机位置关系构建X.Y.Z三坐标系,并依据获取的坐标控制培养皿分别运动到对应的坐标点;之后,控制金属挑针下落,挑取菌落,同时微孔板在控制系统控制下运动对应位置,之后转盘带动金属挑针转动,当转到微孔板的位置时,控制系统控制金属挑针下落,与此同时,伺服电机带动微孔板振动,使得金属挑针上面的菌落与微孔板中的培养液接触,进而完成接种过程;之后,控制金属挑针上升,转盘再次带动挑针转动,当转动到消毒工位时,金属挑针下落,完成消毒,加热过程同上。
除此之外,为了解决培养基表面不均匀从而导致金属挑针无法准确挑选菌落的问题,通过移动培养皿三坐标移动机构的Z轴,可以使得每个菌落都有一个单独的Z坐标,并且使得Z向的伺服电机运动到相应的位置。
上述菌落挑选方法中,S2中菌落识别算法如下:
基于OpenCV图像识别库完成包括前期的图像预处理,图像预处理包括灰度化、二值化、阈值分割,通过分水岭算子完成单个菌落的分割,进而获得单个菌落的图像坐标;之后利用手眼标定,完成图像坐标与世界坐标的绑定,进而获得单个菌落在实际培养皿中的坐标。
本发明的驱动机构除了能够用伺服电机之外也可以使用步进电机作为动力源,以及电缸、丝杠等其他机构。
本发明的酒精消毒装置除了采用气缸之外,也可以用电缸以及凸轮等方式实现。
本发明通过上述技术方案,提供了新式菌落挑选综合工作站和方法,相比于传统的菌落挑选设备,本发明具有如下有益效果:
采用了三坐标移动方式,能够使得培养皿在空间中移动,解决金属挑针无法位置固定而无法挑选到部分菌落的问题,从而有效的提高了培养皿菌落的挑选效率。
除此之外,通过移动培养皿三坐标移动机构的Z轴,可以使得每个菌落都有一个单独的Z坐标,并且使得Z向的伺服电机运动到相应的位置。解决培养基表面不均匀从而导致金属挑针无法准确挑选菌落的问题,
采用了气缸推进式的压缩喷射消毒方式,提高了酒精消毒液的使用效率。
通过样机研制验证了设备挑选的有效性以及酒精消毒的有效性。
能够对菌落进行挑选之外,也能够对于其他微小的物品进行挑选与分拣。
附图说明
本发明的详细内容可通过后述的说明及所附图而得到。
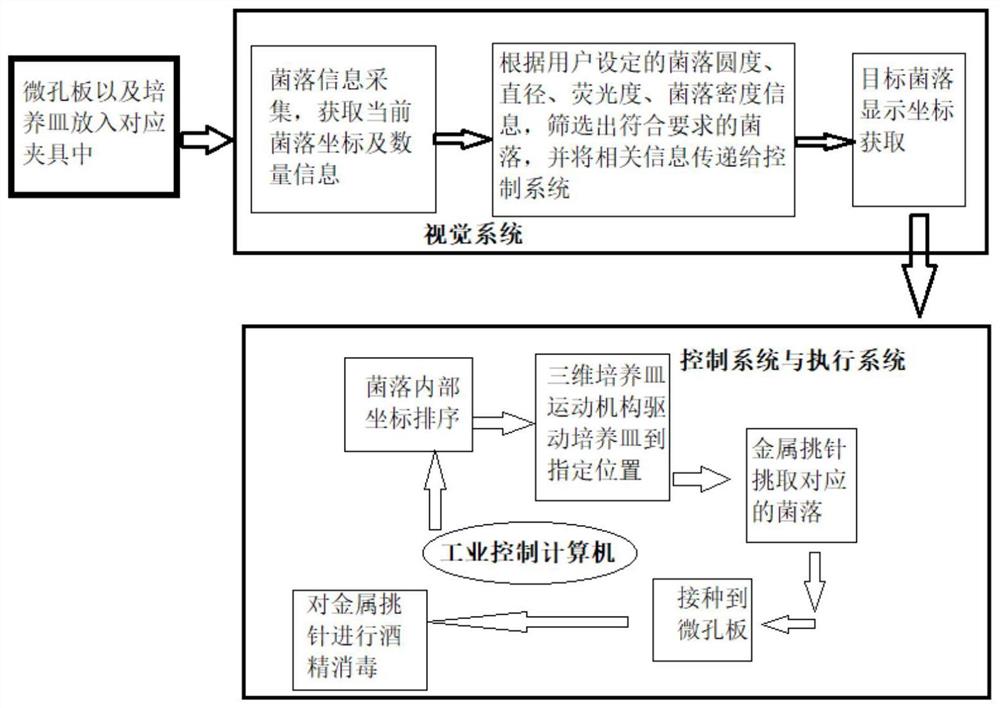
图1是本发明菌落挑选综合工作站及方法的系统框图;
图2是本发明菌落挑选综合工作站正面总体轴侧视图;
图3是本发明菌落挑选综合工作站侧面总体轴侧视图;
图4是本发明高压酒精消毒机构的轴侧视图。
具体实施方式
为了使本发明要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明的技术方案进行进一步详细描述。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
如图1-4所示,本发明公开了一种菌落挑选综合工作站,主要组成部分包括三个部分即视觉系统(工业相机1)、控制系统、执行系统(如附图1所示的培养皿三坐标移动机构、金属挑针转盘机构(主体为可以转动的金属挑针转盘2)、高压酒精消毒机构及可以增加的加热装置),其实际工作流程是:
培养皿三坐标移动机构包括三个坐标轴的伺服电机(X方向伺服电机4、Y方向伺服电机5、Z方向伺服电机6),驱动培养皿3移动到指定位置;
金属挑针转盘机构,包括多个工位间隔设置的金属挑针7,所述每一个金属挑针7均能够移动到指定位置并使得挑针的下方正对培养皿以便挑取对应的菌落,同时每一个金属挑针7也设置为在挑取菌落后能够移动到微孔板8的接种点所在工位;
微孔板8,设置在金属挑针转盘2的接种点所在工位,通过振动机构带动微孔板8振动而使得金属挑针7上面的菌落与微孔板8中的接种点的培养液接触,进而完成接种过程;本实施例中,微孔板为96微孔板,所属振动机构为伺服电机,伺服电机带动96微孔板振动。
高压酒精消毒机构设置在金属挑针转盘2的消毒工位,以便接受下落的金属挑针完成消毒。高压酒精消毒机构包括与压缩喷射气缸11相连通的酒精原料盒10,连接处设置高压阀112,压缩喷射气缸11通过高压阀112连接高压喷头111,所述高压喷头111对准从挑针插入口15往下插入的金属挑针头7,高压喷头111和挑针插入口下方设置消毒废液出口16。
控制系统,主要核心为工控机,用于获取培养皿中的当前菌落三维坐标和菌落数量,控制金属挑针挑取对应的菌落,控制挑取的菌落移动接种到96微孔板,控制金属挑针进行酒精消毒。
本发明还提出了一种三坐标的菌落运动控制方法,即通过给予每个菌落一个三维坐标,并且通过控制伺服电机使得培养皿运动到相应的位置,从而有效解决了培养皿内部培养基表面高度不一致,从而解决无法挑取到菌落的问题,从而有效的提高了接种的效率。
在利用酒精对于金属挑针进行消毒的过程中,为了进一步提高消毒过程中的效率,同时提高消毒酒精的利用率,设计了酒精消毒装置,其具体设计方案如图3所示。
本菌落挑选综合工作站的挑选方法如下:
挑选前的准备工作,需要转运机器人或者是实验人员将培养皿以及96微孔板放到对应的工位上(图2所示)。
视觉系统执行流程:通过伺服电机将培养皿移动至相机正下方,再对培养皿以及内部菌落拍照之后,通过内部图像识别算法获取每个菌落的三维坐标。
(图2所示)。
控制系统执行流程:将获取的三维坐标信息传入工控机内部,之后利用排序算法对坐标进一步排序,之后利用伺服电机1、伺服电机2、伺服电机3构建X.Y.Z三坐标系(如附图2所示),并依据获取的坐标控制培养皿分别运动到对应的坐标点。之后,控制金属挑针下落,挑取菌落,同时96微孔板在控制系统控制下运动对应位置,之后转盘带动金属挑针转动,当转到96微孔板的位置时,控制系统控制金属挑针下落,与此同时,伺服电机带动96微孔板振动,使得金属挑针上面的菌落与96微孔板中的培养液接触,进而完成接种过程。之后,控制金属挑针上升,转盘再次带动挑针转动,当转动到消毒工位时(如附图3所示),金属挑针下落,完成消毒,加热过程同上。
本菌落挑选方法的工作原理如下:
①菌落识别原理:基于OpenCV图像识别库完成包括前期的图像预处理,图像预处理包括灰度化、二值化、阈值分割,通过分水岭算子完成单个菌落的分割,进而获得单个菌落的图像坐标。之后利用手眼标定,完成图像坐标与世界坐标的绑定,进而获得单个菌落在实际培养皿中的坐标。
②培养皿部分三维坐标系构建原理:将三个伺服电机分别置于X.Y.Z三个方向(如附图1所示),以电机带动丝杠完成直线运动,并且以丝杠上的中间传感器作为原点,进而构建一个笛卡尔坐标系,通过这个系统就可以完成培养皿在空间任意点的运动。
③金属挑针上升与下降原理:金属挑针与后端的气缸通过螺纹连接从而实现了固定(如附图2所示),通过控制气缸气阀的开关从而控制气缸的上下运动,进而完成金属挑针的上下运动。
④酒精消毒装置原理:后部的气缸通过压缩中间的压力阀(如附图4所示),从而排出阀中的空气,从而是的内部产生负压,进而将原料盒中的消毒酒精吸入,气缸再次动作时,产生压力压缩压力阀中内部的酒精,从而使得酒精从喷头出高压喷出,进而对金属挑针进行清洗。
⑤设每个金属挑针作为一个工步(如附图2所示),则每一个工步中,需要完成的动作包括挑取菌落、转盘转动、96微孔板运动、96微孔板接种、酒精消毒、高温加热、吹风干燥。为了进一步解决高效挑取的问题,在挑取菌落的过程中,96微孔板同时运动,并且其他工位上分别对挑针进行酒精消毒、高温加热、吹风干燥,即使得上述多个动作同时完成,以节省挑选时间。
除此之外,为了解决培养基表面不均匀从而导致金属挑针无法准确挑选菌落的问题,通过移动培养皿部分的Z轴,可以使得每个菌落都有一个单独的Z坐标,并且使得Z向的伺服电机运动到相应的位置。
本发明提出的新式菌落挑选综合工作站相比于传统的菌落挑选设备
采用了三坐标移动方式,能够使得培养皿在空间中移动,解决金属挑针无法位置固定而无法挑选到部分菌落的问题,从而有效的提高了培养皿菌落的挑选效率。
采用了气缸推进式的压缩喷射消毒方式,提高了酒精消毒液的使用效率。
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 菌落挑选综合工作站及挑选方法
- 表面特性检查挑选装置、表面特性检查挑选系统以及表面特性检查挑选方法