一种卡箍智能装配设备
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及卡箍加工设备技术领域,具体是涉及一种卡箍智能装配设备。
背景技术
卡箍是连接带沟槽的管件、阀门以及管路配件的一种连接装置,用在对快接头之间起紧箍连接作用,一般接头带有垫片,橡胶,硅胶和四氟。其性能良好,密封度高,安装简易。
目前有一种卡箍如图1所示,此该卡箍应用于油田采油树各阀门快速连接。卡箍是连接带沟槽的管件、阀门以及管路配件的一种连接装置,其性能良好,密封度高,安装简易。卡箍按材料可分为: 1.不锈钢双钢丝卡箍; 2.碳素钢双钢丝卡箍; 3.磷铜双钢丝卡箍;4.镀锌双钢丝卡箍; 5.镀镍双钢丝卡箍,此卡箍的两端通过相反设置的螺丝螺母连接,卡箍的拼装仍需要传统人力进行操作,需要提出一种卡箍智能装配设备,可以对卡箍的位置进行限定,自动装配,以及自动下料,大大提供了生产效率。
发明内容
为解决上述技术问题,提供一种卡箍智能装配设备,本技术方案可以对卡箍的位置进行限定,自动装配,以及自动下料,大大提供了生产效率。
为达到以上目的,本发明采用的技术方案为:
一种卡箍智能装配设备,包括:
工作台,工作台上设置有开口,开口处设置有承载板,承载板用于对螺母进行承载;
物料卡紧机构,用于对卡箍进行固定;
物料翻转机构,物料卡紧机构设置于物料翻转机构的输出端,物料翻转机构用于驱动物料卡紧机构进行转动;
物料升降机构,物料翻转机构设置于物料升降机构的输出端,物料升降机构用于驱动物料翻转机构进行纵向移动;
物料横移机构,设置于工作台的旁侧,物料升降机构设置于物料横移机构的输出端,物料横移机构用于驱动物料升降机构进行水平移动;
纵向移动机构和电动螺栓拧紧机构,纵向移动机构设置于工作台的顶部,电动螺栓拧紧机构设置于纵向移动机构的输出端,纵向移动机构用于驱动电动螺栓拧紧机构下降,电动螺栓拧紧机构用于驱动螺栓进行转动。
优选的,物料卡紧机构包括:
限位卡紧组件,限位卡紧组件的非工作部与物料翻转机构的输出端固定连接;
第一弯折爪和第二弯折爪,第一弯折爪和第二弯折爪对称设置于限位卡紧组件的外部,并且第一弯折爪和第二弯折爪均与限位卡紧组件可转动连接;
开合连动组件,设置于限位卡紧组件内部,并且开合连动组件的输出端分别与第一弯折爪和第二弯折爪的受力端连接。
优选的,限位卡紧组件包括:
限位头,限位头为圆柱形,并且限位头外缘对称设置有凸柱;
圆柱仓,设置于限位头的一端并与其固定连接,圆柱仓的外缘与物料翻转机构的输出端固定连接;
铰接座,铰接座沿圆柱仓的轴线对称设置,第一弯折爪和第二弯折爪分别铰接与铰接座上。
优选的,开合连动组件包括:
第一气缸,设置于圆柱仓的内部;
铰接头,设置于限位头的输出端;
第一连杆和第二连杆,第一连杆和第二连杆的受力端均与铰接头铰接,第一连杆和第二连杆的输出端分别与第一弯折爪和第二弯折爪的受力端铰接。
优选的,物料翻转机构包括:
叉形头,设置于物料卡紧机构的非工作部并与其固定连接;
连动杆,连动杆的输出端与叉形头固定连接;
轴承座,设置于物料升降机构的输出端;
第一伺服电机,设置于轴承座上,第一伺服电机的输出端与连动杆的受力端连接。
优选的,物料升降机构包括:
纵移板,设置于物料翻转机构的底部并与其固定连接;
固定板,设置于物料横移机构的输出端并与其固定连接;
导向杆和螺纹杆,导向杆和螺纹杆均设置于固定板的顶部,导向杆与固定板固定连接并与纵移板滑动连接,螺纹杆与固定板可转动连接并与纵移板螺纹连接;
升降驱动组件,设置于固定板的顶部,升降驱动组件的输出端与螺纹杆传动连接。
优选的,升降驱动组件包括:
第二伺服电机,设置于固定板的顶部;
第一皮带轮,设置于第二伺服电机的输出端;
第二皮带轮,套设于螺纹杆上并与其固定连接,第一皮带轮和第二皮带轮之间通过皮带传动连接。
优选的,物料横移机构包括:
底板,底板的顶部设置有滑轨;
滑动块,设置于底板的顶部,并且滑动块与滑轨滑动连接;
第二气缸,设置于底板的顶部,第二气缸的输出端与滑动块连接。
优选的,纵向移动机构包括:
立柱架,设置于工作台的顶部;
顶板,设置于立柱架的顶部;
第三气缸,设置于顶板的底部;
推板设置于第三气缸的输出端,电动螺栓拧紧机构设置于推板的底部。
优选的,推板的顶部对称设置有第一限位杆和第二限位杆,第一限位杆和第二限位杆的顶端均贯穿顶板并与其滑动连接。
本发明与现有技术相比具有的有益效果是:卡箍如图1所示包括有第一卡环片、第二卡环片、螺栓和螺母,首先工作人员将第一卡环片和第二卡环片合拢于物料卡紧机构的输出端,然后物料卡紧机构开始工作,物料卡紧机构的输出端互相靠近将第一卡环片和第二卡环片位置进行限定并且固定,工作人员将螺母放置于工作台的承载板上,通过承载板对螺母进行承载并防止其转动,然后物料横移机构开始工作,物料横移机构的输出端带动物料升降机构进行移动,物料升降机构再通过物料翻转机构带动物料卡紧机构靠近承载板处,此时承载板上的螺母处于第一卡环片和第二卡环片的一端,然后物料升降机构开始工作,物料升降机构的输出端带动物料翻转机构下降,再通过物料翻转机构带动物料卡紧机构下降,直至第一卡环片和第二卡环片的一端与螺母贴合并且孔洞共轴线设置,此时工作人员将螺母自上而下的穿过第一卡环片和第二卡环片,然后纵向移动机构开始工作,纵向移动机构的输出端带动电动螺栓拧紧机构下降,电动螺栓拧紧机构开始工作,通过电动螺栓拧紧机构的输出端带动螺栓转动,使得螺栓扭入螺母中,然后纵向移动机构带动电动螺栓拧紧机构进行上升,物料升降机构的输出端通过物料翻转机构带动物料卡紧机构上升,物料横移机构的输出端再带动卡箍远离电动螺栓拧紧机构的输出端,物料翻转机构开始工作,物料翻转机构的输出端带动卡箍转动一百八十度,再将以上的步骤重复一遍将卡箍的另一端螺栓螺母安装上,最后物料卡紧机构的输出端松开对卡箍的固定,工作人员将其取出;
1、通过物料卡紧机构的设置,可以对卡箍进行快速夹紧;
2、通过本设备的设置,可以对卡箍的位置进行限定,自动装配,以及自动下料,大大提供了生产效率。
附图说明
图1为卡箍的立体结构示意图;
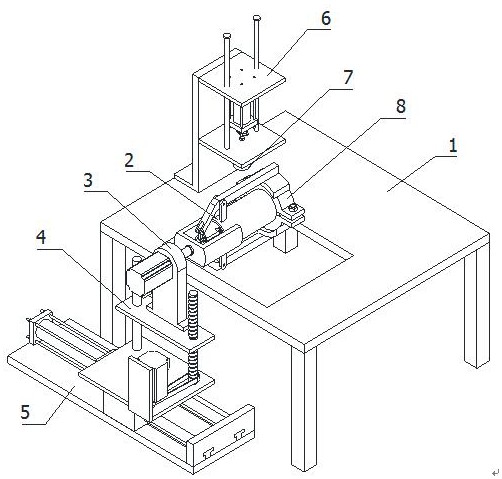
图2为本发明的立体结构示意图一;
图3为本发明的立体结构示意图二;
图4为本发明的工作台的立体结构示意图;
图5为本发明的物料卡紧机构的立体结构示意图一;
图6为本发明的物料卡紧机构的立体结构示意图二;
图7为本发明的物料卡紧机构的立体结构示意图三;
图8为本发明的物料翻转机构的立体结构示意图;
图9为本发明的物料升降机构的立体结构示意图一;
图10为本发明的物料升降机构的立体结构示意图二;
图11为本发明的物料横移机构的立体结构示意图;
图12为本发明的纵向移动机构的立体结构示意图。
图中标号为:
1-工作台;1a-承载板;
2-物料卡紧机构;2a-限位卡紧组件;2a1-限位头;2a2-圆柱仓;2a3-铰接座;2b-第一弯折爪;2c-第二弯折爪;2d-开合连动组件;2d1-第一气缸;2d2-铰接头;2d3-第一连杆;2d4-第二连杆;
3-物料翻转机构;3a-叉形头;3b-连动杆;3c-轴承座;3d-第一伺服电机;
4-物料升降机构;4a-纵移板;4b-固定板;4c-导向杆;4d-螺纹杆;4e-升降驱动组件;4e1-第二伺服电机;4e2-第一皮带轮;4e3-第二皮带轮;
5-物料横移机构;5a-底板;5a1-滑轨;5b-滑动块;5c-第二气缸;
6-纵向移动机构;6a-立柱架;6b-顶板;6c-第三气缸;6d-推板;6d1-第一限位杆;6d2-第二限位杆;
7-电动螺栓拧紧机构;
8-卡箍;8a-第一卡环片;8b-第二卡环片;8c-螺栓;8d-螺母。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
参照图2至图3所示,一种卡箍智能装配设备,包括:
工作台1,工作台1上设置有开口,开口处设置有承载板1a,承载板1a用于对螺母进行承载;
物料卡紧机构2,用于对卡箍进行固定;
物料翻转机构3,物料卡紧机构2设置于物料翻转机构3的输出端,物料翻转机构3用于驱动物料卡紧机构2进行转动;
物料升降机构4,物料翻转机构3设置于物料升降机构4的输出端,物料升降机构4用于驱动物料翻转机构3进行纵向移动;
物料横移机构5,设置于工作台1的旁侧,物料升降机构4设置于物料横移机构5的输出端,物料横移机构5用于驱动物料升降机构4进行水平移动;
纵向移动机构6和电动螺栓拧紧机构7,纵向移动机构6设置于工作台1的顶部,电动螺栓拧紧机构7设置于纵向移动机构6的输出端,纵向移动机构6用于驱动电动螺栓拧紧机构7下降,电动螺栓拧紧机构7用于驱动螺栓进行转动;
卡箍如图1所示包括有第一卡环片、第二卡环片、螺栓和螺母,首先工作人员将第一卡环片和第二卡环片合拢于物料卡紧机构2的输出端,然后物料卡紧机构2开始工作,物料卡紧机构2的输出端互相靠近将第一卡环片和第二卡环片位置进行限定并且固定,工作人员将螺母放置于工作台1的承载板1a上,通过承载板1a对螺母进行承载并防止其转动,然后物料横移机构5开始工作,物料横移机构5的输出端带动物料升降机构4进行移动,物料升降机构4再通过物料翻转机构3带动物料卡紧机构2靠近承载板1a处,此时承载板1a上的螺母处于第一卡环片和第二卡环片的一端,然后物料升降机构4开始工作,物料升降机构4的输出端带动物料翻转机构3下降,再通过物料翻转机构3带动物料卡紧机构2下降,直至第一卡环片和第二卡环片的一端与螺母贴合并且孔洞共轴线设置,此时工作人员将螺母自上而下的穿过第一卡环片和第二卡环片,然后纵向移动机构6开始工作,纵向移动机构6的输出端带动电动螺栓拧紧机构7下降,电动螺栓拧紧机构7开始工作,通过电动螺栓拧紧机构7的输出端带动螺栓转动,使得螺栓扭入螺母中,然后纵向移动机构6带动电动螺栓拧紧机构7进行上升,物料升降机构4的输出端通过物料翻转机构3带动物料卡紧机构2上升,物料横移机构5的输出端再带动卡箍远离电动螺栓拧紧机构7的输出端,物料翻转机构3开始工作,物料翻转机构3的输出端带动卡箍转动一百八十度,再将以上的步骤重复一遍将卡箍的另一端螺栓螺母安装上,最后物料卡紧机构2的输出端松开对卡箍的固定,工作人员将其取出。
如图5所示物料卡紧机构2包括:
限位卡紧组件2a,限位卡紧组件2a的非工作部与物料翻转机构3的输出端固定连接;
第一弯折爪2b和第二弯折爪2c,第一弯折爪2b和第二弯折爪2c对称设置于限位卡紧组件2a的外部,并且第一弯折爪2b和第二弯折爪2c均与限位卡紧组件2a可转动连接;
开合连动组件2d,设置于限位卡紧组件2a内部,并且开合连动组件2d的输出端分别与第一弯折爪2b和第二弯折爪2c的受力端连接;
工作人员将第一卡环片和第二卡环片合拢于限位卡紧组件2a的工作部,然后开合连动组件2d开始工作,开合连动组件2d的输出端同时推动第一弯折爪2b和第二弯折爪2c的受力端,然后第一弯折爪2b和第二弯折爪2c同时转动,通过第一弯折爪2b和第二弯折爪2c的输出端将第一卡环片和第二卡环片固定于限位卡紧组件2a的工作部。
如图6所示限位卡紧组件2a包括:
限位头2a1,限位头2a1为圆柱形,并且限位头2a1外缘对称设置有凸柱;
圆柱仓2a2,设置于限位头2a1的一端并与其固定连接,圆柱仓2a2的外缘与物料翻转机构3的输出端固定连接;
铰接座2a3,铰接座2a3沿圆柱仓2a2的轴线对称设置,第一弯折爪2b和第二弯折爪2c分别铰接与铰接座2a3上;
工作人员将第一卡环片和第二卡环片合拢于限位头2a1,通过限位头2a1上对称设置的凸柱使得第一卡环片和第二卡环片中间隔有间隙,以使得卡箍在拆装的过程中不会由于过紧无法拆开,圆柱仓2a2用于与物料翻转机构3的输出端连接以及容纳开合连动组件2d,铰接座2a3用于使第一弯折爪2b和第二弯折爪2c铰接于圆柱仓2a2的外部。
如图7所示开合连动组件2d包括:
第一气缸2d1,设置于圆柱仓2a2的内部;
铰接头2d2,设置于限位头2a1的输出端;
第一连杆2d3和第二连杆2d4,第一连杆2d3和第二连杆2d4的受力端均与铰接头2d2铰接,第一连杆2d3和第二连杆2d4的输出端分别与第一弯折爪2b和第二弯折爪2c的受力端铰接;
开合连动组件2d开始工作,第一气缸2d1的输出端推动铰接头2d2,第一连杆2d3和第二连杆2d4推动第一弯折爪2b和第二弯折爪2c同时转动,通过第一弯折爪2b和第二弯折爪2c的输出端将第一卡环片和第二卡环片固定于限位卡紧组件2a的工作部。
如图8所示物料翻转机构3包括:
叉形头3a,设置于物料卡紧机构2的非工作部并与其固定连接;
连动杆3b,连动杆3b的输出端与叉形头3a固定连接;
轴承座3c,设置于物料升降机构4的输出端;
第一伺服电机3d,设置于轴承座3c上,第一伺服电机3d的输出端与连动杆3b的受力端连接;
物料翻转机构3开始工作,第一伺服电机3d的输出端带动连动杆3b转动,连动杆3b通过叉形头3a带动物料卡紧机构2转动一百八十度,轴承座3c用于固定支撑。
如图9所示物料升降机构4包括:
纵移板4a,设置于物料翻转机构3的底部并与其固定连接;
固定板4b,设置于物料横移机构5的输出端并与其固定连接;
导向杆4c和螺纹杆4d,导向杆4c和螺纹杆4d均设置于固定板4b的顶部,导向杆4c与固定板4b固定连接并与纵移板4a滑动连接,螺纹杆4d与固定板4b可转动连接并与纵移板4a螺纹连接;
升降驱动组件4e,设置于固定板4b的顶部,升降驱动组件4e的输出端与螺纹杆4d传动连接;
物料升降机构4开始工作,升降驱动组件4e的输出端带动螺纹杆4d转动,螺纹杆4d带动纵移板4a沿导向杆4c进行纵向移动,固定板4b用于固定支撑。
如图10所示升降驱动组件4e包括:
第二伺服电机4e1,设置于固定板4b的顶部;
第一皮带轮4e2,设置于第二伺服电机4e1的输出端;
第二皮带轮4e3,套设于螺纹杆4d上并与其固定连接,第一皮带轮4e2和第二皮带轮4e3之间通过皮带传动连接;
升降驱动组件4e开始工作,第二伺服电机4e1的输出端带动第一皮带轮4e2转动,第一皮带轮4e2通过皮带带动第二皮带轮4e3转动,第二皮带轮4e3带动螺纹杆4d转动。
如图11所示物料横移机构5包括:
底板5a,底板5a的顶部设置有滑轨5a1;
滑动块5b,设置于底板5a的顶部,并且滑动块5b与滑轨5a1滑动连接;
第二气缸5c,设置于底板5a的顶部,第二气缸5c的输出端与滑动块5b连接;
物料横移机构5开始工作,第二气缸5c的输出端驱动滑动块5b沿滑轨5a1进行移动,底板5a用于固定支撑。
如图12所示纵向移动机构6包括:
立柱架6a,设置于工作台1的顶部;
顶板6b,设置于立柱架6a的顶部;
第三气缸6c,设置于顶板6b的底部;
推板6d设置于第三气缸6c的输出端,电动螺栓拧紧机构7设置于推板6d的底部;
纵向移动机构6开始工作,第三气缸6c的输出端推动推板6d下降,推板6d带动电动螺栓拧紧机构7进行下降,立柱架6a和顶板6b用于固定支撑。
如图12所示推板6d的顶部对称设置有第一限位杆6d1和第二限位杆6d2,第一限位杆6d1和第二限位杆6d2的顶端均贯穿顶板6b并与其滑动连接;
第一限位杆6d1和第二限位杆6d2用于对推板6d的移动方向进行限制。
本发明的工作原理:卡箍如图1所示包括有第一卡环片、第二卡环片、螺栓和螺母,首先工作人员将第一卡环片和第二卡环片合拢于限位头2a1,通过限位头2a1上对称设置的凸柱使得第一卡环片和第二卡环片中间隔有间隙,开合连动组件2d开始工作,第一气缸2d1的输出端推动铰接头2d2,第一连杆2d3和第二连杆2d4推动第一弯折爪2b和第二弯折爪2c同时转动,通过第一弯折爪2b和第二弯折爪2c的输出端将第一卡环片和第二卡环片固定于限位头2a1上,工作人员将螺母放置于工作台1的承载板1a上,通过承载板1a对螺母进行承载并防止其转动,然后物料横移机构5开始工作,第二气缸5c的输出端驱动滑动块5b沿滑轨5a1进行移动,滑动块5b带动物料升降机构4进行移动,物料升降机构4再通过物料翻转机构3带动物料卡紧机构2靠近承载板1a处,此时承载板1a上的螺母处于第一卡环片和第二卡环片的一端,然后物料升降机构4开始工作,升降驱动组件4e开始工作,第二伺服电机4e1的输出端带动第一皮带轮4e2转动,第一皮带轮4e2通过皮带带动第二皮带轮4e3转动,第二皮带轮4e3带动螺纹杆4d转动,螺纹杆4d带动纵移板4a沿导向杆4c进行下降,纵移板4a带动物料翻转机构3下降,再通过物料翻转机构3带动物料卡紧机构2下降,直至第一卡环片和第二卡环片的一端与螺母贴合并且孔洞共轴线设置,此时工作人员将螺母自上而下的穿过第一卡环片和第二卡环片,然后纵向移动机构6开始工作,第三气缸6c的输出端推动推板6d下降,推板6d带动电动螺栓拧紧机构7进行下降,电动螺栓拧紧机构7开始工作,通过电动螺栓拧紧机构7的输出端带动螺栓转动,使得螺栓扭入螺母中,然后纵向移动机构6带动电动螺栓拧紧机构7进行上升,物料升降机构4的输出端通过物料翻转机构3带动物料卡紧机构2上升,物料横移机构5的输出端再带动卡箍远离电动螺栓拧紧机构7的输出端,物料翻转机构3开始工作,第一伺服电机3d的输出端带动连动杆3b转动,连动杆3b通过叉形头3a带动物料卡紧机构2转动一百八十度,再将以上的步骤重复一遍将卡箍的另一端螺栓螺母安装上,最后物料卡紧机构2的输出端松开对卡箍的固定,工作人员将其取出。
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
步骤一、工作人员将第一卡环片和第二卡环片合拢于物料卡紧机构2的输出端;
步骤二、物料卡紧机构2开始工作,物料卡紧机构2的输出端互相靠近将第一卡环片和第二卡环片位置进行限定并且固定;
步骤三、工作人员将螺母放置于工作台1的承载板1a上;
步骤四、物料横移机构5开始工作,物料横移机构5的输出端带动物料升降机构4进行移动,物料升降机构4再通过物料翻转机构3带动物料卡紧机构2靠近承载板1a处;
步骤五、物料升降机构4的输出端带动物料翻转机构3下降,再通过物料翻转机构3带动物料卡紧机构2下降,直至第一卡环片和第二卡环片的一端与螺母贴合并且孔洞共轴线设置;
步骤六、工作人员将螺母自上而下的穿过第一卡环片和第二卡环片;
步骤七、纵向移动机构6开始工作,纵向移动机构6的输出端带动电动螺栓拧紧机构7下降,电动螺栓拧紧机构7开始工作,通过电动螺栓拧紧机构7的输出端带动螺栓转动,使得螺栓扭入螺母中;
步骤八、纵向移动机构6带动电动螺栓拧紧机构7进行上升,物料升降机构4的输出端通过物料翻转机构3带动物料卡紧机构2上升,物料横移机构5的输出端再带动卡箍远离电动螺栓拧紧机构7的输出端;
步骤九、物料翻转机构3开始工作,物料翻转机构3的输出端带动卡箍转动一百八十度,再将以上的步骤重复一遍将卡箍的另一端螺栓螺母安装上;
步骤十、物料卡紧机构2的输出端松开对卡箍的固定,工作人员将其取出。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
- 一种卡箍智能装配设备
- 一种用于多批量的铜管卡箍自动装配设备