多工位等距平移输送机构
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及自动化装配设备,具体涉及一种自动化装配设备用的多工位等距平移输送机构。
背景技术
常规自动化装配设备包括上料机构、压装机构、下料机构等多个机构,每相邻两机构间设有输送机构,有的输送机构包括升降气缸、平移气缸和气缸夹爪,从而使工件在若干机构间移动。这种自动化装配存在输送机构设置较多、体积大和成本高的问题。
申请号为201710918262.X的中国专利公开了一种自动化装配设备,通过在圆形的流转板周向设置若干工位,以分别用于上料机构、压装机构、下料机构等机构的放置,通过流转板的自转以使工件依次经过不同的工位。这种自动化装配设备结构紧凑,成本较低,但是工件的支撑和移动全靠流转板实现,流转板只有中部与分度盘或旋转电机的输出端连接,设备长时间的使用会使流转板变形,不便于后续工件的压装,使得工件的装配精度降低。
发明内容
本发明的目的是提供一种不易变形受损,能同时实现多个工件同步移动的多工位等距平移输送机构。
为实现上述目的,本发明采用如下技术方案:一种多工位等距平移输送机构,包括支撑板,所述支撑板上设有若干前后间隔设置的工位,相邻两工位间的距离相同,所述支撑板上方设有两个左右相对设置的夹板,两夹板之间为工件放置区域,至少一夹板搭配有用于使夹板沿左右方向移动的第一驱动机构及用于使夹板沿前后方向移动的第二驱动机构。
使用时,工件在人工或其它输送机构(比如夹爪组件或机械手)的作用下移动至支撑板上,当工件需要移动至下一工位上时,两夹板在第一驱动机构作用下合拢以夹持工件,随后工件在第二驱动机构作用下向前移动,以带动工件移动至前侧工位,能使每个工位上的工件都移动至前一个工位,实现多工位上工件的同步移动。本发明机构的支撑板是固定不动的,也没有旋转支撑于分度盘或电机的转轴上,即使受压也不易倾斜、变形,使用寿命更长。其中,本发明机构是搭配其他工件输送机构及压装机构等一起使用,几个机构等距设置在支撑板上,支撑板上可以设置上下贯穿的让位槽,支撑板对于让位槽下侧处设有用于支撑工件的支撑座,也可以直接将工件放置于支撑板上,通过支撑板对工件进行压装时支撑。
作为优选,所述第一驱动机构和第二驱动机构均位于支撑板下侧。第一驱动机构和第二驱动机构设置于支撑板下侧,压装机构的压机及其它输送机构的夹爪可以设置在支撑板上方,以使本发明机构结构更为紧凑,便于其它机构的设置,并以使本设备结构更为紧凑。
作为优选,所述两夹板均搭配有一第一驱动机构,所述两夹板共用一第二驱动机构,两夹板分别与一第一驱动机构输出端联动,所述第一驱动机构均固定于第二驱动机构输出端。上述设置以使本发明机构结构更为简单,装配及后续检修更为方便。其中,两个夹板分别搭配一个第一驱动机构,能将工件夹持在支撑板正中,不会使工件左右移动,便于工件后续的压装。
作为优选,所述夹板包括固定不动的固定夹板及搭配有第一驱动机构的活动夹板,所述活动夹板靠近固定件的一侧设有若干夹槽。通过设置夹槽,以限制工件相对夹板前后移动,同时增加夹板与工件的接触面,能更好地带动工件沿支撑板前后移动。
作为优选,所述两夹板互相临近处设有相互对应的夹槽。通过设置夹槽,以限制工件相对夹板前后移动,同时增加夹板与工件的接触面,能更好地带动工件沿支撑板前后移动。
作为优选,搭配有第一驱动机构的夹板下端面始终位于支撑板上端面上方,夹板下端面与支撑板上端面互不接触。上升设置以避免活动夹板移动时与支撑板接触,避免活动夹板与支撑板间有摩擦存在,以降低设备使用时的噪音,并提高本发明机构支撑板和活动夹板的使用寿命。
本发明具有不易变形受损,使用寿命更长,结构更为紧凑,能同时实现多个工件同步移动的优点。
附图说明
图1为本发明的一种结构示意图。
具体实施方式
下面根据附图和具体实施例对本发明作进一步描述。
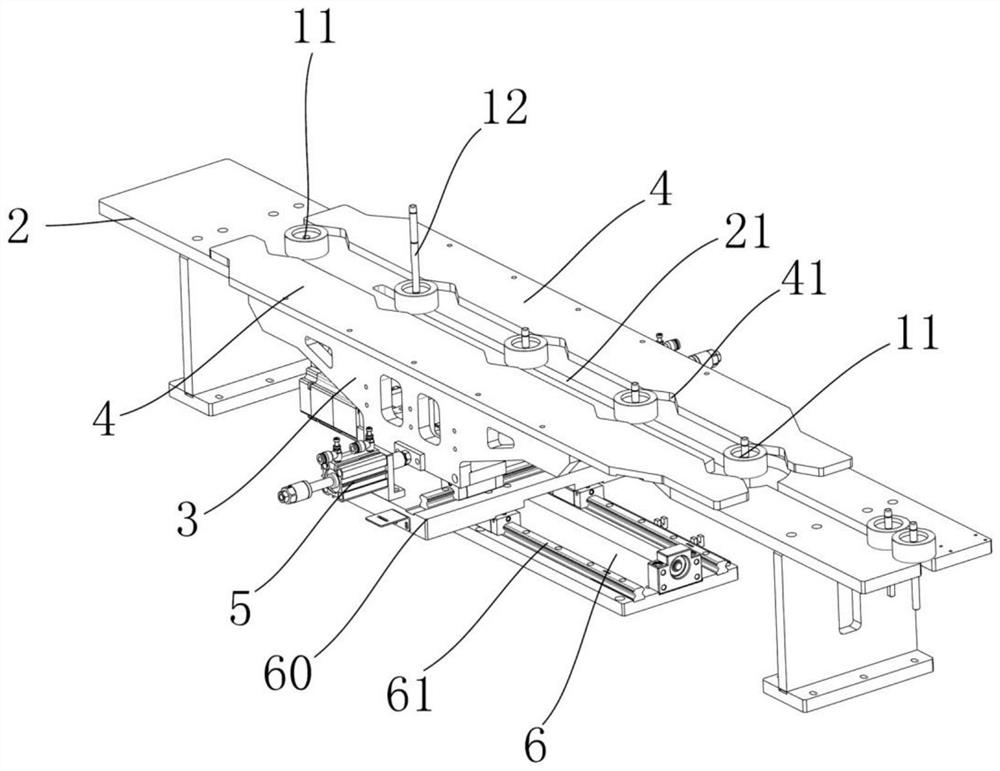
由图1所示,本发明公开了一种多工位等距平移输送机构,用于铁芯11与转轴12压装过程中铁芯11及压装有转轴12的铁芯11的移动,包括沿前后方向布置的支撑板2,支撑板2具有上下贯穿并沿前后方向设置并对转轴12的让位槽21,支撑板2处设有若干前后间隔设置的工位,相邻两工位间的距离相同,所述工位包括铁芯上料工位、转轴上料工位、压装工位等多个工位。
支撑板2上方设有两个左右相对设置的夹板4,两夹板4之间为工件放置区域,夹板4均搭配有用于使夹板4沿左右方向移动的第一驱动机构5及用于使夹板4沿前后方向移动的第二驱动机构6。其中,第一驱动机构5包括直线气缸,第二驱动机构6包括由伺服电机驱动的电动丝杆及导轨组件61。其中,两夹板4互相临近处设有相互对应的夹槽41,夹板4下端面始终位于支撑板2上端面上方,夹板4下端面与支撑板2上端面互不接触。
其中,第一驱动机构5和第二驱动机构6均位于支撑板2下侧,两夹板4均搭配有一第一驱动机构5,两夹板4共用一第二驱动机构6,两夹板4分别与一第一驱动机构5输出端联动,第一驱动机构5均固定于第二驱动机构6输出端。其中,第二驱动机构6输出端固定有活动板60,活动板60左右两端分别设有一第一驱动机构5,夹板4边缘固定有向下延伸的联动板3,联动板3与第一驱动机构5输出端固定。
本发明具有不易变形受损,使用寿命更长,结构更为紧凑,能同时实现多个工件同步移动的优点。
- 多工位等距平移输送机构
- 多工位等距平移输送机构