一种扑翼型飞行器的振翅驱动机构
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及飞行器技术领域,尤其是涉及一种扑翼型飞行器的振翅驱动机构。
背景技术
现有许多飞行器通常是单一地依靠飞行器的速度或推进部件的运转速度来产生其在空中飞行或滞留空中的升力,当飞行器的速度或转动部件的速度下降了,维持飞行的升力也随之下降或消失。扑翼型飞行器是一种仿生型飞行器,其不完全依赖于飞行器的速度来产生升力,而是能利用振翅的下压力和上升气流等自然力来维持其在空中飞行和滞留空中的升力,因此扑翼型飞行器具有特有的灵活性和安全性,是现代人类力求有所突破的飞行器之一。
现有技术中,扑翼型飞行器中由连杆机构或曲柄连杆机构驱动的振翅驱动机构,每个运转循环、驱动翼翅上下振翅的幅度都是相同的,运行呆板,不利于飞行器的灵活飞行和各种驱动能源的有效利用,与自然界中的鸟儿的振翅飞行运动相去甚远。
发明内容
本发明要解决的技术问题是提供一种扑翼型飞行器的振翅驱动机构,一种由具有特定凸轮曲线的凸轮驱动的振翅驱动机构,设有特定凸轮曲线槽的振翅驱动凸轮运转一周即360度,使凸轮曲线槽内的凸轮滚轮滚动,凸轮驱动振翅机构能够驱动翼翅完成两个或两个以上、上下振翅振幅相同或不相同的振翅循环,以增加振翅飞行的灵活性和利用各种驱动能源飞行的有效性。
为了解决上述技术问题,本发明提供一种扑翼型飞行器的振翅驱动机构,包括安装于飞行器的机架上的动力机构、开设有凸轮曲线槽的可转动的振翅驱动凸轮、设于所述凸轮曲线槽内并可在该槽内凸轮曲线上滚动的凸轮滚轮,用于连接翼翅的振翅驱动臂与所述凸轮滚轮上的凸轮滚轮支轴相连动;所述动力机构驱动振翅驱动凸轮转动,所述凸轮滚轮在所述凸轮曲线槽内滚动,实现驱动所述振翅驱动臂和与其连接的翼翅完成上下幅度的振翅循环。
作为优选方式,所述振翅驱动凸轮转动一周即360度,所述振翅驱动凸轮上的凸轮曲线槽及在凸轮曲线槽上滚动的凸轮滚轮能够驱动振翅驱动臂和与其连接的翼翅完成两个或两个以上相同上下幅度或者不相同上下幅度的振翅循环。
作为优选方式,所述凸轮滚轮支轴与振翅驱动臂之间连接有振翅驱动杠杆,所述振翅驱动杠杆通过杠杆支轴可转动地安装在与机架固定连接的杠杆支座上,所述振翅驱动杠杆的一端与凸轮滚轮支轴连接,另一端部通过铰接连接件与所述振翅驱动臂相铰接,所述铰接连接件与振翅驱动杠杆和振翅驱动臂的铰支连接均具有两个或两个以上的自由度。
作为优选方式,支撑所述翼翅的十字形轴的迎角调节轴线支轴可转动地支撑在与所述机架固定连接的主翼支架上,所述翼翅的主翼骨架可转动地支撑在所述十字形轴的与迎角调节轴线垂直的振翅轴线支轴上,由所述振翅驱动臂驱动着翼翅以十字形轴的振翅轴线支轴为轴的振翅摆动。
作为优选方式,所述十字形轴的迎角调节轴线支轴上装配有固定于机架上并能驱动该支轴转动的迎角调节器,所述迎角调节器驱动十字形轴以迎角调节轴线转动,调节所述翼翅的迎角。
作为优选方式,所述翼翅可转动的支撑在与机架固定连接的主翼前铰支点和铰支在由固定在机架上的由后迎角调节器驱动的迎角升降件上的主翼后铰支点上,后迎角调节器驱动迎角升降件的升降,调节所述翼翅的迎角。
作为优选方式,所述主翼前铰支点和所述主翼后铰支点均为具有两个或两个以上自由度的铰支点。
作为优选方式,所述翼翅包括主翼和付翼;所述主翼与所述振翅驱动臂连接、且与所述机架相铰接;所述付翼铰接于所述主翼的外端、可相对后者进行摆动。
作为优选方式,所述付翼摆动的驱动力由付翼驱动杆提供;所述付翼驱动杆的一端与所述付翼铰接,其另一端与铰支在所述机架上的摆杆相铰接;所述摆杆的中部与连杆的一端铰支连接,连杆的另一端与固定在所述主翼骨架上的驱动臂相铰接。
本发明涉及一种扑翼型飞行器的振翅驱动机构,一种由具有特定凸轮曲线的凸轮驱动的振翅驱动机构,与现有设计相比,其优点在于:本发明中飞行器的翼翅铰接于机架上,机架上还安装有可转动的振翅驱动凸轮,振翅驱动凸轮上开设有凸轮曲线槽,凸轮曲线槽内设有凸轮滚轮,翼翅通过振翅驱动臂与凸轮滚轮的凸轮滚轮支轴相连接,由动力机构驱动振翅驱动凸轮转动,驱动凸轮滚轮沿特定的凸轮曲线槽内滚动运动,以驱动振翅驱动臂和翼翅完成特定要求的幅度、速度的上下振翅运动,具有特定凸轮曲线的振翅驱动凸轮转动一周即360度,可驱动翼翅完成两个或两个以上、上下振翅幅度相同或不相同的振翅循环。
进一步地,本发明的飞行器中上下振翅以产生升力和控制飞行的翼翅包含有主翼和付翼,主翼与机架铰支连接,付翼铰支在主翼上,由主翼摆动而驱动的连杆机构驱动付翼的摆动,并要求付翼的上下振翅幅度要大于主翼的振翅幅度。
进一步地,本发明铰支在机架上的主翼可以由固定在机架上的迎角调节器驱动在迎角调节轴线上转动,可调整主翼及付翼振翅、飞行时的迎角,以调节飞行器的升力和姿态。
附图说明
图1是本发明中实施例1的正视示意图。
图2是本发明中图1中A部放大示意图。
图3是本发明中实施例1的俯视示意图(轴对称结构图中的一半)。
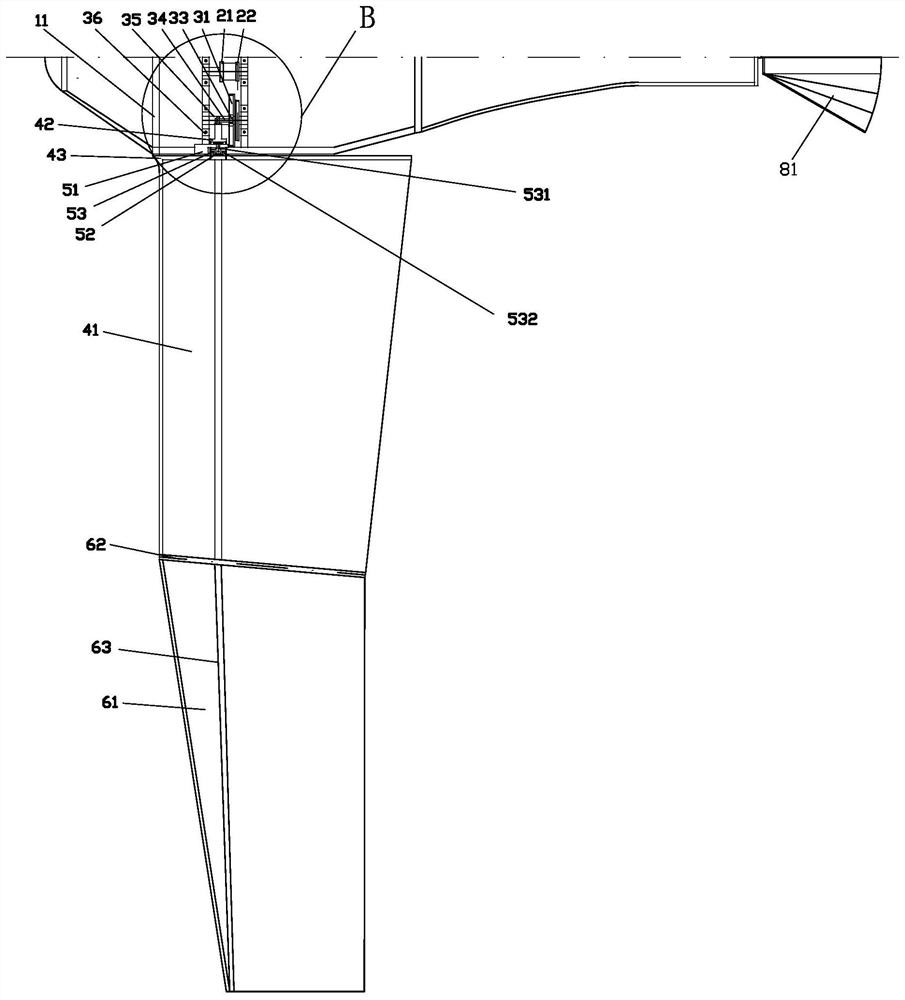
图4是本发明中图3中B部放大示意图。
图5是本发明中实施例1振翅状态的侧视示意图。
图6是本发明中图5中C部放大示意图。
图7是本发明中实施例2的正视示意图。
图8是本发明中图7中E部正视示意图。
图9是本发明中图7中D部正视示意图。
图10是本发明中实施例2的俯视示意图(轴对称结构图中的一半)。
图11是本发明中图10中F部放大示意图。
图12是本发明中图10中G部放大示意图。
图13是本发明中实施例3的正视示意图。
图14是本发明中图13中H部放大示意图。
图15是本发明中实施例3的俯视示意图(轴对称结构图中的一半)。
图16是本发明中图15中I部放大示意图。
附图标记如下:
11-机架、12-蒙皮、21-动力机构、22-动力传动机构、31-振翅驱动凸轮、32-凸轮曲线槽、33-凸轮滚轮、34-凸轮滚轮支轴、35-凸轮支轴、36-凸轮支座、37-振翅驱动杠杆、38-杠杆支轴、39-杠杆支座、310-铰接连接件、41-主翼、42-振翅驱动臂、43-主翼骨架、44-主翼前铰支点、51-迎角调节器、52-主翼支架、53-十字形轴、531-迎角调节轴线支轴、532-振翅轴线支轴、54-后迎角调节器、55-迎角升降件、56-主翼后铰支点、61-付翼、62-付翼铰支轴、63-付翼骨架、71-付翼驱动杆、72-支架、73-摆杆、74-连杆、75-驱动臂、81-尾翼。
具体实施方式
下文结合说明书附图和具体实施例对本发明进行详细说明。
本发明定义机架上靠近飞行器机头的部分为前部,机架上靠近飞行器机尾的部分为后部。
本发明涉及一种扑翼型飞行器的振翅驱动机构,特别是一种由具有特定凸轮曲线的凸轮驱动的振翅驱动机构,如图1~16所示,飞行器包括机架11、罩设于机架11外的蒙皮12和安装于机架11尾部的尾翼81等与现有扑翼型飞行器基本相同的常规组件,所不同的是,机架11上安装有凸轮振翅驱动机构,包括铰接于机架11侧边的翼翅、安装于机架11上的动力机构21、动力传动机构22、振翅驱动凸轮31、凸轮滚轮33、振翅驱动臂42,其中,振翅驱动凸轮31通过凸轮支轴35可转动地安装在固定于机架11上的凸轮支座36上。动力机构21通过动力传动机构22驱动振翅驱动凸轮31转动,凸轮滚轮33在振翅驱动凸轮31上的凸轮曲线槽32内滚动。翼翅通过振翅驱动臂42与连接于凸轮滚轮33上的凸轮滚轮支轴34连接。振翅驱动凸轮31转动一周即360度,实现凸轮滚轮33在凸轮曲线槽32内滚动,从而驱动振翅驱动臂42和与其连接的翼翅完成两个或两个以上、相同上下幅度或者不相同上下幅度的振翅循环。
实施例1
如图1~6所示,本发明扑翼型飞行器的振翅驱动机构包括安装于机架11上的动力机构21、动力传动机构22、振翅驱动凸轮31、凸轮滚轮33、凸轮滚轮支轴34、主翼41、振翅驱动臂42、主翼骨架43、迎角调节器51、主翼支架52、十字形轴53、付翼61、付翼铰支轴62、付翼骨架63、付翼驱动杆71、支架72、摆杆73、连杆74、驱动臂75、尾翼81。
动力机构21固定在机架11上,动力机构21的动力来源可以是电力、内燃动力,也可以是人力驱动等动力源,及以上动力源的混合动力来源。振翅驱动凸轮31与凸轮支轴35连接,凸轮支轴35可转动的支撑在固定于机架11上的凸轮支座36上,使振翅驱动凸轮31以大致垂直于飞行器纵向轴线的方向设置。振翅驱动凸轮31的侧面加工有特定的凸轮曲线槽32,凸轮曲线槽32的形状依据特定的振翅需求而定,如完成两个振翅循环的凸轮曲线可以是大致“8”字形,槽内形成供凸轮滚轮33滚动的凸轮曲线。
动力机构21通过动力传动机构22驱动振翅驱动凸轮31转动,实现凸轮滚轮33在振翅驱动凸轮31的凸轮曲线槽32内沿凸轮曲线进行滚动。凸轮滚轮33上连接有支撑凸轮滚轮33转动的凸轮滚轮支轴34,凸轮滚轮支轴34的另一端连接有振翅驱动臂42,振翅驱动臂42的另一端与主翼骨架43固定连接。主翼骨架43可转动地支撑在十字形轴53的振翅轴线支轴532上,支撑主翼41的振翅摆动。
十字形轴53的迎角调节轴线支轴531(迎角调节轴线支轴531的轴线与飞行器纵轴大致垂直)可转动地安装在固定于机架11上靠近主翼41的侧边的主翼支架52上,支撑着十字形轴53。
所述迎角调节轴线支轴531上装配有固定于机架11上并能驱动该支轴转动的迎角调节器51。迎角调节器51可按要求驱动十字形轴53以迎角调节轴线支轴531为支撑轴进行转动,以调节安装在十字形轴53上的主翼41及与主翼41铰接的付翼61的振翅、飞行时的迎角,从而调节飞行器的升力和姿态。
凸轮滚轮33按特定的凸轮曲线槽32设计的上下振幅和速度,经凸轮滚轮支轴34、振翅驱动臂42传动后驱动主翼41以十字形轴53中的振翅轴线支轴532为支撑轴进行振翅运动,完成两个或两个以上、相同上下振幅或不相同上下振幅的振翅循环。如附图5所示,具有特定凸轮曲线槽32的振翅驱动凸轮31自0度位开始运转,驱动翼翅的第①个振翅循环,自主翼41和付翼61的初始位置开始①下压至翼翅的最低位,而后,驱动主翼41和付翼61开始①上抬至翼翅的最高位置,结束第①个振翅循环,振翅驱动凸轮31继续转动,驱动翼翅的第②个振翅循环,驱动主翼41和付翼61自翼翅的最高位,开始②下压至一个低位,而后,驱动主翼41和付翼61开始②上抬至翼翅的初始位置停止,完成振翅驱动凸轮31转动一周即360度,驱动翼翅完成2个不同上下振幅的振翅循环,如此类推。
付翼61通过付翼铰支轴62铰支连接于主翼41的外端、可相对主翼41进行摆动,付翼驱动杆71提供付翼61摆动的驱动力。付翼驱动杆71的一端与付翼骨架63固定连接的支架72铰支连接,另一端与摆杆73的一端铰支连接,摆杆73的另一端铰支在机架11上;摆杆73的中部与连杆74的一端铰支连接,连杆74的另一端与固定在主翼骨架43上的驱动臂75铰支连接。主翼41上下振翅摆动,通过驱动臂75、连杆74驱动摆杆73摆动,摆杆73摆动经付翼驱动杆71驱动付翼61相对主翼41进行摆动,由于连杆74铰支在摆杆73的中部,铰支在摆杆73顶端的付翼驱动杆71驱动付翼61上下摆动的幅度要大于主翼41上下摆动的幅度,以使付翼61振翅摆动能够压缩、推动更多的气流,为扑翼型飞行器提供更多的推动力,类似于自然界鸟类的飞行。
实施例2
如图7~12所示,本实施例2与实施例1的结构基本相同,所不同的是,主翼骨架43的前部和后部分别可转动地铰支安装在主翼前铰支点44和主翼后铰支点56上。主翼41按凸轮曲线32设计的上下振幅和速度,以主翼前铰支点44和主翼后铰支点56为铰支轴线进行振翅运动,主翼前铰支点44和主翼后铰支点56均具有两个或两个以上的自由度。
主翼前铰支点44固定在机架11的前部侧边,与凸轮滚轮支轴34连接的振翅驱动臂42与主翼骨架43连接,驱动主翼41的振翅摆动。
主翼后铰支点56固定在机架11的后部侧边,主翼后铰支点56与固定在机架11后部的迎角升降件55铰支连接,固定在机架11上的后迎角调节器54可按要求驱动迎角升降件55上下升降运动,迎角升降件55的上下升降运动可以调节主翼后铰支点56与机架11的相对高度位置,从而调节由主翼前铰支点44和主翼后铰支点56支撑在机架11上的主翼41及付翼61飞行和振翅时的迎角,以调节飞行器的升力和姿态。
实施例3
如图13~16所示,本实施例3与实施例1的结构基本相同,所不同的是,振翅驱动凸轮31以大致平行于飞行器纵向轴线的方向通过凸轮支轴35可转动的支撑在固定于机架11上的凸轮支座36上。振翅驱动凸轮31的侧面加工有特定的凸轮曲线槽32,凸轮曲线槽32的形状依据特定的振翅需求而定,如完成两个振翅循环的凸轮曲线可以是大致“∞”字形,槽内形成供凸轮滚轮33滚动的凸轮曲线。
所述凸轮滚轮支轴34与振翅驱动臂42之间连接有振翅驱动杠杆37,振翅驱动杠杆37通过杠杆支轴38可转动地安装在与机架11固定连接的杠杆支座39上,振翅驱动杠杆37的一端与凸轮滚轮支轴34连接,振翅驱动杠杆37的另一端通过铰接连接件310与振翅驱动臂42连接,振翅驱动臂42的另一端与主翼骨架43固定连接,主翼骨架43可转动的支撑在十字形轴53的振翅轴线支轴532上。铰接连接件310与振翅驱动杠杆37和振翅驱动臂42的铰支连接均具有两个或两个以上的自由度。
动力机构21通过动力传动机构22驱动振翅驱动凸轮31转动,实现凸轮滚轮33在振翅驱动凸轮31的凸轮曲线槽32内滚动。凸轮滚轮33经凸轮滚轮支轴34驱动振翅驱动杠杆37以杠杆支轴38为轴进行摆动,从而驱动铰接于振翅驱动杠杆37另一端通过铰接连接件310驱动振翅驱动臂42和与其连接的主翼41按照凸轮曲线32设计的上下振幅和速度,以十字形轴53中的振翅轴线支轴532为支撑轴进行振翅运动,振翅驱动凸轮31上的凸轮曲线32能够实现振翅驱动凸轮31转动一周即360度,实现主翼41完成两个或两个以上,相同上下振幅或不相同上下振幅的振翅循环。
- 一种扑翼型飞行器的振翅驱动机构
- 一种用于扑旋翼飞行器的驱动机构