一种猕猴桃统收装置及方法
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及水果采摘机械,特别是一种梳刷分离采摘兼分级的猕猴桃统收装置及方法。
背景技术
猕猴桃采摘是一项劳动密集、季节性较强、耗时耗力的工作,人工劳动力投入占整个生产过程的50%-70%。随着农业现代化智能化的发展,完全依赖人工采摘分级的方式已经不能满足现代化农业发展的需求。猕猴桃果园一般采用棚架式种植模式,果实成簇状垂直向下生长,果柄脆弱且长度较长,果柄尺寸接近于果实长径,便于末端执行器对果实的梳刷剪切。
目前猕猴桃采摘主要依赖人工完成,现有的猕猴桃采摘设备主要采用视觉识别技术对猕猴桃进行识别,机械臂带动末端执行器到达目标果实附近,完成对猕猴桃的采摘。面对复杂的田间环境采摘设备适应性较差,且只能实现对单个果实采摘,采摘效率和成功率较低。另一方面为提高猕猴桃果实的商品价值,适应不同市场消费者的需求,需要对采收后的果实按照采重量进行分级包装。目前猕猴桃的分级工作主要通过人工完成,存在人工费用高、分级不准确、劳动强度大等问题,严重制约猕猴桃产业的发展。
发明内容
本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种梳刷分离采摘兼分级的猕猴桃统收装置,以解决猕猴桃采摘效率低且无法实现自动分级的问题。
为了实现上述目的,本发明提供了一种猕猴桃统收装置,其中,包括:
机架;
控制器,安装在所述机架上;
剪切机构,安装在所述机架顶部,包括曲柄连杆、刀杆和切割刀,所述曲柄连杆的一端与所述刀杆连接,所述曲柄连杆的另一端与驱动电机连接,所述驱动电机驱动所述曲柄连杆带动所述刀杆往复运动,所述刀杆带动所述切割刀运动完成对果柄的剪切;
梳果机构,设置在所述剪切结构下方,所述梳果机构包括连接轴和等间距安装在所述连接轴上的梳刷齿,所述连接轴的两端安装在所述机架上,所述梳刷齿对应设置于所述切割刀下方,相邻两个所述梳刷齿之间设置有导果槽,所述导果槽的宽度大于猕猴桃果柄直径;
集果机构,包括上集果槽和下集果槽,所述上集果槽安装在所述梳果机构下方的机架上,所述下集果槽位于所述上集果槽下方并倾斜安装在所述机架上,所述上集果槽和下集果槽分别设置有果实滑落口,所述果实滑落口尺寸与猕猴桃尺寸适配;
称重传感器,对应于所述上集果槽的果实滑落口安装在所述下集果槽内,并与所述控制器连接;
卸果机构,对应于所述下集果槽倾斜安装在所述机架上,所述卸果机构包括果槽和多个用于果实分级的电磁卸果门,所述电磁卸果门安装在所述果槽底部,并与所述控制器连接,所述控制器根据所述称重传感器采集的信息发送指令,控制所述电磁卸果门开启与关闭;以及
果箱,对应于果实分级的顺序依次设置在所述电磁卸果门下方。
上述的猕猴桃统收装置,其中,所述剪切机构通过支撑导向板安装在所述机架上,所述刀杆安装在所述支撑导向板的凹槽内,并在所述曲柄连杆的带动下在凹槽内做往复运动。
上述的猕猴桃统收装置,其中,所述切割刀包括多个三角型齿刃结构的刀片,每个所述刀片均布焊接在所述刀杆上。
上述的猕猴桃统收装置,其中,所述梳刷齿的前端为弯曲弧形,以将猕猴桃果实果柄导入所述导果槽内,并避免猕猴桃藤蔓的缠绕。
上述的猕猴桃统收装置,其中,所述梳刷齿的前端通过弹簧与所述机架连接,以实现上下自由浮动,适应不同高度的猕猴桃采摘。
上述的猕猴桃统收装置,其中,所述称重传感器为悬臂梁称重传感器,并设置在所述下集果箱的上端,所述悬臂梁称重传感器包括称重面板、载荷梁、承压头、支撑板和支撑杆,所述支撑杆安装在所述下集果箱上,所述支撑板安装在所述支撑杆上,所述载荷梁和称重面板分别安装在所述支撑板上,所述承压头位于所述载荷梁内,并对应于所述称重面板设置。
上述的猕猴桃统收装置,其中,所述上集果槽和下集果槽的内壁上分别设置有柔性泡沫材料,以避免果实下落过程发生损伤。
上述的猕猴桃统收装置,其中,所述果箱包括大果箱、中果箱、小果箱和次果箱,每个所述电磁卸果门对应一个等级重量的猕猴桃,所述大果箱、中果箱、小果箱和次果箱分别放置在相应分级的所述电磁卸果门下方。
上述的猕猴桃统收装置,其中,所述上集果槽的果实滑落口处还设置有开启门机构,所述开启门机构与所述控制器连接,所述控制器控制所述开启门机构每隔设定时间打开所述上集果槽的果实滑落口,以保证每次只有一个猕猴桃通过所述上集果槽的果实滑落口,便于所述称重传感器采集猕猴桃的重量。
为了更好地实现上述目的,本发明还提供了一种猕猴桃统收方法,其中,采用上述的猕猴桃统收装置采摘猕猴桃,包括如下步骤:
S100、将所述猕猴桃统收装置搭载在移动平台上;
S200、开启电源,同时开启驱动电机,使剪切机构做往复切割运动;
S300、梳果机构贴合在猕猴桃棚架下方,猕猴桃果梗进入梳刷齿之间的导果槽,猕猴桃果实位于所述梳刷齿下方,所述梳刷齿为猕猴桃果实与果梗的切割分离提供支撑;
S400、猕猴桃果柄沿所述导果槽向后运动,剪切机构将猕猴桃的果实和果柄剪切分离,分离的果实从上集果槽的果实滑落口进入下集果槽;并与安装在所述下集果槽内的称重传感器发生碰撞,所述称重传感器记录猕猴桃重量信息并传送至控制器;以及
S500、卸果机构接收到所述控制器发送的猕猴桃重量信息,发送指令至相应等级的电磁卸果门打开,使猕猴桃顺利滑落至相应分级的果箱。
本发明的技术效果在于:
本发明可以实现对猕猴桃果实的统收和分级,解决了现有采摘设备采摘效率低、适应性不强且无法实现采后分级的问题。采用梳刷式分离机构对猕猴桃果实和果柄进行分离,将果实和果柄分离成排分布,避免剪切机构对猕猴桃果实的损伤;分离后的猕猴桃经过称重传感器,重量信息被传送至控制器,实现对果实大小的分类处理。
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
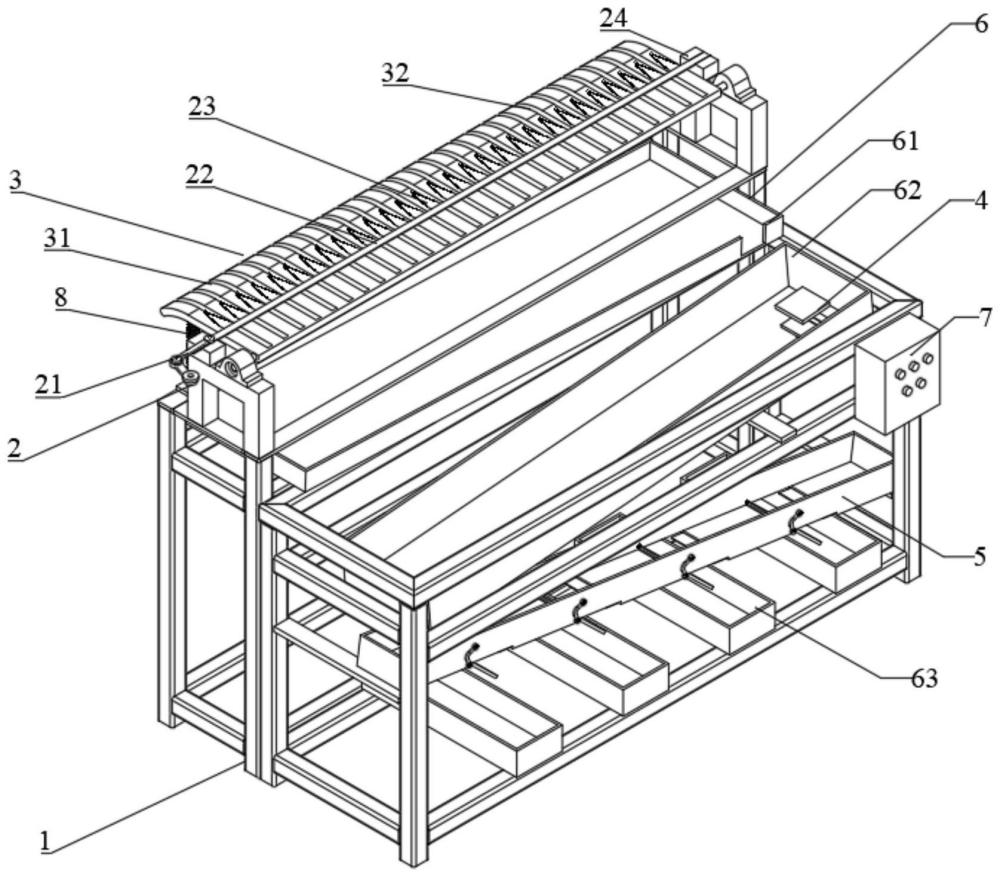
图1为本发明一实施例的猕猴桃统收装置结构示意图;
图2为本发明一实施例的剪切机构示意图;
图3为本发明一实施例的梳果机构结构示意图;
图4为本发明一实施例的称重传感器结构示意图;
图5为本发明一实施例的卸果机构结构示意图;
其中,图中标记
1机架
2剪切机构
21曲柄连杆
22刀杆
23切割刀
24支撑导向板
3梳果机构
31梳刷齿
32导果槽
33连接轴
4称重传感器
41称重面板
42承压头
43载荷梁
44支撑板
45支撑杆
5卸果机构
51卸果门
52电磁铁
53果槽
6集果机构
61上集果槽
62下集果槽
63果箱
7控制器
8弹簧
具体实施方式
下面结合附图对本发明的结构原理和工作原理作具体的描述:
参见图1,图1为本发明一实施例的猕猴桃统收装置结构示意图。本发明的猕猴桃统收装置搭载移动平台,通过对称重传感器4反馈的信息进行融合处理,并发送指令控制卸果机构5调整电磁卸果门51的工作状态,实现对猕猴桃的田间采摘统收。该猕猴桃统收装置包括:机架1;控制器7,安装在所述机架1上;剪切机构2,安装在所述机架1顶部,用于切断被梳刷分离的猕猴桃果柄,包括曲柄连杆21、刀杆22和切割刀23,所述曲柄连杆21的一端与所述刀杆22连接,所述曲柄连杆21的另一端与驱动电机连接,所述驱动电机驱动所述曲柄连杆21带动所述刀杆22往复运动,所述刀杆22带动所述切割刀23运动完成对果柄的剪切;梳果机构3,设置在所述剪切结构下方,用于梳刷分离猕猴桃果实和果柄,便于剪切机构2对果柄的切割,所述梳果机构3包括连接轴33和等间距安装在所述连接轴33上的梳刷齿31,所述连接轴33的两端安装在所述机架1上,所述梳刷齿31对应设置于所述切割刀23下方,相邻两个所述梳刷齿31之间设置有导果槽32,即相邻两个梳刷齿31之间的间距为果柄导果槽32,所述导果槽32的宽度大于猕猴桃果柄直径;集果机构6,用于收集被从果柄上剪切收获的猕猴桃,包括上集果槽61和下集果槽62,所述上集果槽61安装在所述梳果机构3下方的机架1上,所述下集果槽62位于所述上集果槽61下方并倾斜安装在所述机架1上,通过调整倾斜角度可以控制猕猴桃的滑落速度,所述上集果槽61和下集果槽62分别设置有果实滑落口,所述果实滑落口尺寸与猕猴桃尺寸适配,保证每次让一个果实滑落,所述上集果槽61和下集果槽62的内壁上可分别设置柔性泡沫材料,以避免果实下落过程发生损伤;称重传感器4,对应于所述上集果槽61的果实滑落口安装在所述下集果槽62内,并与所述控制器7连接,用于猕猴桃等级的筛选;卸果机构5,对应于所述下集果槽62倾斜安装在所述机架1上,所述卸果机构5包括果槽53和多个用于果实分级的电磁卸果门51,所述电磁卸果门51安装在所述果槽53底部,并与所述控制器7连接,所述控制器7根据所述称重传感器4采集的信息发送指令,控制所述电磁卸果门51开启与关闭,用于实现猕猴桃正确进入相应等级的集果箱63内;以及果箱63,对应于果实分级的顺序依次设置在所述电磁卸果门51下方。本实施例的所述果箱63包括大果箱63、中果箱63、小果箱63和次果箱63,每个所述电磁卸果门51对应一个等级重量的猕猴桃,所述大果箱63、中果箱63、小果箱63和次果箱63分别放置在相应分级的所述电磁卸果门51下方。
参见图2,图2为本发明一实施例的剪切机构2示意图。本实施例的所述剪切机构2通过支撑导向板24安装固定在所述机架1上,所述刀杆22安装在所述支撑导向板24的凹槽内,并在所述曲柄连杆21的带动下在凹槽内做平行往复运动。其中,所述切割刀23包括多个三角型齿刃结构的刀片,每个所述刀片均布焊接或铆接在所述刀杆22上,通过驱动电机带动刀杆22做往复运动,在刀杆22的带动下完成对果柄的剪切,能够实现对猕猴桃果柄进行快速剪切。
参见图3,图3为本发明一实施例的梳果机构3结构示意图。本实施例的所述梳刷齿31的前端为弯曲弧形,以将猕猴桃果实果柄导入所述导果槽32内,并避免猕猴桃藤蔓的缠绕,在梳刷齿31的作用下,猕猴桃被梳刷成排分布。其中,优选所述梳刷齿31的分离梳齿前端通过弹簧8与所述机架1连接,以实现上下自由浮动,适应不同高度的猕猴桃采摘。簇状生长的猕猴桃果实,通过梳刷齿31梳刷后果柄沿导果槽32向后运动,成簇的果实被分离成排分布,便于对猕猴桃果柄进行剪切。梳刷齿31前端通过弹簧8可实现上下自由浮动,能够适应不同高度的猕猴桃采摘。梳刷齿31前端呈弯曲弧形,能够更好的将猕猴桃果实果柄导入导果槽32内,同时有效避免猕猴桃藤蔓的缠绕。梳刷齿31后端可通过轴承座与机架1连接,能够实现自由转动。
参见图4,图4为本发明一实施例的称重传感器4结构示意图。本实施例中,所述称重传感器4为悬臂梁称重传感器4,并设置在所述下集果箱63的上端,该碰撞式称重传感器4,能够实现猕猴桃在线重量实时检测,并根据猕猴桃重量信息进行储存与输送。所述悬臂梁称重传感器4包括称重面板41、载荷梁43、承压头42、支撑板44和支撑杆45,所述支撑杆45安装在所述下集果箱63上,所述支撑板44安装在所述支撑杆45上,所述载荷梁43和称重面板41分别安装在所述支撑板44上,所述承压头42位于所述载荷梁43内,并对应于所述称重面板41设置。上集果槽61内的猕猴桃从果实滑落口下落与称重面板41发生碰撞,通过载荷梁43和承压头42记录猕猴桃重量信息并输送至控制器7进行处理,根据猕猴桃分级标准,确定不同等级的猕猴桃等级和不同的卸果通道。
参见图5,图5为本发明一实施例的卸果机构5结构示意图。本实施例的卸果机构5倾斜安装在所述机架1上,所述果槽53底部设置有4个电磁卸果门51,4个电磁卸果门51分别对应大果、中果、小果、次果等级。每个电磁卸果门51分别包括电磁铁52和卸果门51,卸果门51枢接在果槽53的开口处,电磁铁52对应该卸果门51安装在果槽53开口处,根据控制器7发送的猕猴桃重量信息开启和关闭对应的卸果门51,通电时电磁铁52产生磁力将卸果门51吸合关闭,断电时电磁铁52磁力消失,卸果门51在自身重力作用下被打开,猕猴桃顺利滑落进入对应等级的果箱63。
本实施例中,所述上集果槽61一侧的果实滑落口处还可设置有开启门机构,所述开启门机构与所述控制器7连接,所述控制器7控制所述开启门机构每隔设定时间打开所述上集果槽61的果实滑落口,以保证每次只有一个猕猴桃通过所述上集果槽61的果实滑落口,便于所述称重传感器4采集猕猴桃的重量。该开启门机构可由电磁开关控制,每隔2秒钟开启一次门,保证每次只能让一个猕猴桃通过。
本发明猕猴桃统收装置的猕猴桃统收方法,包括如下步骤:
步骤S100、将所述猕猴桃统收装置搭载在移动平台上;
步骤S200、开启电源,同时开启驱动电机,使剪切机构2做往复切割运动;
步骤S300、梳果机构3贴合在猕猴桃棚架下方,猕猴桃果梗进入梳刷齿31之间的导果槽32,猕猴桃果实位于所述梳刷齿31下方,所述梳刷齿31为猕猴桃果实与果梗的切割分离提供支撑;
步骤S400、猕猴桃果柄沿所述导果槽32向后运动,剪切机构2将猕猴桃的果实和果柄剪切分离,分离的果实从上集果槽61的果实滑落口进入下集果槽62;并与安装在所述下集果槽62内的称重传感器4发生碰撞,所述称重传感器4记录猕猴桃重量信息并传送至控制器7;以及
步骤S500、卸果机构5接收到所述控制器7发送的猕猴桃重量信息,发送指令至相应等级的电磁卸果门51打开,使猕猴桃顺利滑落至相应分级的果箱63。
本发明通过与采摘机器人连接,能够实现簇状猕猴桃梳刷一次性多果采摘;解决了现有技术猕猴桃采摘效率低、适应性不强、价格昂贵、劳动力短缺且成本高的难题,能够实现对猕猴桃果实的一次性采收,有效提高了猕猴桃采摘效率,提高了采摘效率;同时能够实现对采后猕猴桃的在线分级,保证了果实的采摘质量,大大降低了采摘生产成本和劳动强度。具有操作简单方便、采摘效率高、采摘质量好、可实现猕猴桃自动筛选分级等特点,实现了簇状猕猴桃多果一次性梳刷分离采摘。
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。