变径圆弧螺旋线Radon变换的高速机动目标检测方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明隶属于雷达目标检测跟踪研究领域,适用于解决低可观测的高速机动目标帧间非相参积累检测问题。
背景技术
高超声速飞行器是一种新型的武器,其具有速度快、机动性强、隐身性高等特点,给雷达探测跟踪带来巨大挑战。
对这类目标,信号长时间积累是一种有效方法,积累分为相参积累和非相参积累,考虑到相参积累受到波束驻留时间、实时性要求等影响,往往难以满足检测需求。因此,在相参积累的基础上再进行扫描帧之间非相参积累是一种解决思路,典型的代表是TBD技术。TBD 技术是一种利用雷达多帧之间的轨迹能量非相参积累的方法,适用于微弱目标检测,Hough 变换方法是其典型代表,但是Hough变换要求目标轨迹为直线,如果不为直线,则积累效率会下降,因此,难以满足高超声速目标高速、机动、微弱的特点。
针对这一问题,本发明提供了一种基于变径圆弧螺旋线Radon变换的高速机动目标检测方法,该方法将目标的一段机动轨迹用一个变径圆弧螺旋线来建模,不同的机动轨迹为不同参数的变径圆弧螺旋线,通过搜索不同螺旋线的参数,找到与目标轨迹相匹配的螺旋线,然后进行能量积累,目标所在的螺旋线参数空间会出现一个能量峰值,通过门限检测,获取这个峰值,进一步通过这个峰值回书找出取得该能量峰值的量测点迹。从而实现了能量的检测。
本发明提供了一种新颖的变径圆弧螺旋线Radon变换的高速机动目标检测方法,传统的 Hough变换可以看作是圆弧半径足够大时的特例。同时该方法考虑了三坐标雷达的距离、方位、俯仰三维量测,通过合适的参数设置,同样适用于距离、方位的二维量测的雷达。在进行轨迹搜索时,将目标的运动轨迹用二次多项式建模,实际应用中可以根据需要对距离、方位、俯仰维度上分别选取不同的多项式来进行建模。
发明内容
针对高速机动目标雷达扫描帧间非相参积累检测问题,提供了一种变径圆弧螺旋线 Radon变换的高速机动目标检测,通过变径圆弧螺旋线对目标机动轨迹建模,通过变径圆弧螺旋线Radon来匹配搜索目标的机动轨迹,实现目标轨迹上能量的非相参积累与检测。本发明解决所述技术问题,采用技术方案步骤如下:
1.变径圆弧螺旋线Radon变换的高速机动目标检测方法,其特征在于包括以下技术措施:
步骤(一)、提取雷达一段时间滑窗内多个扫描帧的量测,离散化雷达量测空间,获取距离-方位-俯仰-帧编号的四维矩阵s(m,n,d,k),其中m代表距离分辨单元编号,m=1,2,...,M, M代表距离分辨单元的总数,n代表方位分辨单元编号,n=1,2,...,N,N代表方位分辨单元总数,d代表俯仰分辨单元编号,d=1,2,…,D,D代表俯仰分辨单元总数,k代表扫描帧编号, k=1,2,…,K,K代表扫描帧的总数;
步骤(二)、预先设定一个第一门限,将时间滑窗内所有帧的量测与第一门限比较,找出大于第一门限的量测;
步骤(三)、将径向速度、径向加速度、方位角速度、方位角加速度、俯仰角速度、俯仰角加速度作为搜索参数,以超过第一检测门限的量测作为搜索起点,在扫描帧之间距离-方位-俯仰维度上进行变径圆弧螺旋线Radon变换进行搜索和能量积累,得到能量分布矩阵R(n,m,d),并进行门限检测;其中变径圆弧螺旋线Radon变换具体步骤如下:
(31)假设N帧的机动目标轨迹在笛卡尔坐标系下的量测为(x(t),y(t),z(t)),该轨迹分别在距离-时间ρ-t
(32)假设轨迹起点对应的时间t为0,初始距离、方位、俯仰分别用r
其中,x(t)、y(t)、z(t)为一条变径圆弧螺旋线轨迹
(33)将目标机动轨迹在各个方向上的解耦函数用二次多项式近似,可得
ρ(t)=v
θ(t)=v
则搜索轨迹可以近似为
上式中,v
(34)选取不同的参数,假设对应的搜索轨迹为h(t),则可以在参数空间得到能量分布矩阵
(35)求
(36)对R(n,m,d)进行门限检测,
步骤(四)、对能量分布矩阵R(n,m,d)进行门限检测,如果有超过门限的信号,则依据该信号回溯找到对应的目标航迹,完成检测。
本发明的有益效果是:
对比现有技术,本技术方案所述的变径圆弧螺旋线Radon变换的高速机动目标检测方法,有益效果在于:
(1)该方法用变径圆弧螺旋线对目标机动轨迹建模,克服了传统Hough变换要求目标轨迹为直线的限制;
(2)该方法以目标第一帧的量测为搜索起点,去搜索变径圆弧螺旋线轨迹,克服了现有椭圆Hough变换、双曲线Hough变换需要在整个量测空间搜索椭圆的问题,减低了搜索参数的个数,便于工程实现。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉该技术的人在本发明所揭露的技术范围内,可延伸到其他的修改、变化和应用,都应涵盖在本发明的包含范围之内。
附图说明
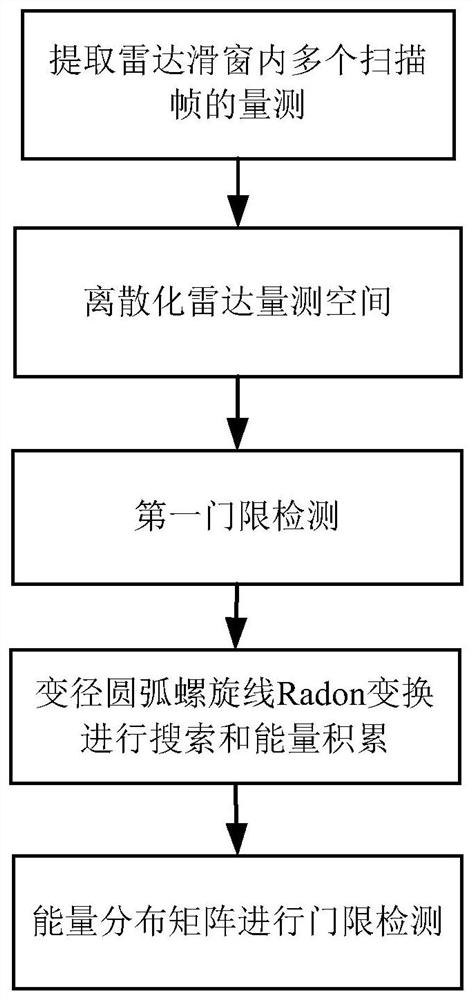
附图1本发明的方法步骤流程图;
附图2是7帧雷达量测图;
附图3是变径圆弧螺旋线Radon变换后能量积累图;
附图4是目标点迹检测结果图。
具体实施方式
下面结合附图,详细描述本发明的技术方案,参照附图1,本发明的具体步骤包括:
1.变径圆弧螺旋线Radon变换的高速机动目标检测方法,其特征在于包括以下技术措施:
步骤(一)、提取雷达一段时间滑窗内多个扫描帧的量测,离散化雷达量测空间,获取距离-方位-俯仰-帧编号的四维矩阵s(m,n,d,k),其中m代表距离分辨单元编号,m=1,2,...,M, M代表距离分辨单元的总数,n代表方位分辨单元编号,n=1,2,...,N,N代表方位分辨单元总数,d代表俯仰分辨单元编号,d=1,2,…,D,D代表俯仰分辨单元总数,k代表扫描帧编号, k=1,2,…,K,K代表扫描帧的总数;
步骤(二)、预先设定一个第一门限,将时间滑窗内所有帧的量测与第一门限比较,找出大于第一门限的量测;
步骤(三)、将径向速度、径向加速度、方位角速度、方位角加速度、俯仰角速度、俯仰角加速度作为搜索参数,以超过第一检测门限的量测作为搜索起点,在扫描帧之间距离-方位-俯仰维度上进行变径圆弧螺旋线Radon变换进行搜索和能量积累,得到能量分布矩阵R(n,m,d),并进行门限检测;其中变径圆弧螺旋线Radon变换具体步骤如下:
(31)假设N帧的机动目标轨迹在笛卡尔坐标系下的量测为(x(t),y(t),z(t)),该轨迹分别在距离-时间ρ-t
(32)假设轨迹起点对应的时间t为0,初始距离、方位、俯仰分别用r
其中,x(t)、y(t)、z(t)为一条变径圆弧螺旋线轨迹
(33)将目标机动轨迹在各个方向上的解耦函数用二次多项式近似,可得
ρ(t)=v
θ(t)=v
则搜索轨迹可以近似为
上式中,v
(34)选取不同的参数,假设对应的搜索轨迹为h(t),则可以在参数空间得到能量分布矩阵
(35)求
(36)对R(n,m,d)进行门限检测,
步骤(四)、对能量分布矩阵R(n,m,d)进行门限检测,如果有超过门限的信号,则依据该信号回溯找到对应的目标航迹,完成检测。
本发明的效果可以通过以下matlab仿真实验进一步说明:
仿真实验场景设置
假设雷达最大作用距离为600km,方位观测范围为0~360°,最大俯仰角度为20°,距离分辨单元取500m,距离测量误差为200m,方位波束宽度为5°,俯仰波束宽度为5°,方位角测量误差为0.2°,俯仰角测量误差为0.2°,扫描帧数为7帧,目标初始距离为550km,目标径向速度为3400m/s,目标径向加速度为98m/s
仿真结果及分析:
由附图2可以看出,在10dB情况下,目标淹没在噪声中,利用变径圆弧螺旋线Radon变换处理后,可以从附图3中明显看出能量峰值,附图4可以看出目标被全部正确检测出来,证明了方法的有效性。
- 变径圆弧螺旋线Radon变换的高速机动目标检测方法
- 基于时频脊-Radon变换的海面小目标检测方法和装置