一种无液压刹车的风电机组偏航控制系统及控制方法
文献发布时间:2023-06-19 09:38:30
技术领域
本发明属于风力发电技术领域,特别是涉及一种无液压刹车的风电机组偏航控制系统及控制方法。
背景技术
偏航系统是风电机组控制系统的重要组成部分,其作用在于当风速矢量的方向变化时,能够快速平稳地对准风向,以便风轮获得最大的风能,以在相同的风速状态下向电网输送更多的电能。
为避免因偏航系统载荷方向、大小突变导致机舱不受控旋转,同时为了避免机舱在整个偏航过程中因突然出现顺时针或逆时针方向的力而导致机舱突然加速或反向运动,因此需要为机舱施加合适的偏航阻尼(通常称为偏航保持力矩)保障整个偏航过程的安全性。
传统偏航系统中的偏航电机是由软启动器、接触器或普通变频器进行一拖多的粗放型控制,采用液压刹车部分投入的液压阻尼为偏航系统提供偏航保持力矩(一般为50%液压刹车片投入,即半阻尼状态),而这种传统方式在偏航动作过程中刹车片与制动盘之间存在较大的滑动摩擦。因此,传统偏航系统存在以下问题:
1)机械结构冲击较大、负载无法平衡;
2)液压刹车片磨损速度快、后期运维成本高;
3)偏航过程噪音较大等问题。
发明内容
针对上述问题,本发明提供了一种无液压刹车的风电机组偏航控制系统及控制方法,采用变频驱动器驱动三相同步偏航电机提供电磁阻尼取代液压刹车部分,能够有效解决传统偏航系统存在机械结构冲击较大、负载不平衡、液压刹车片磨损速度快、偏航过程噪音较大等问题,可提升系统的偏航性能,提升机组的环境适应性,降低产品成本及机组后期运维成本。
为了解决上述技术问题,本发明采用了如下的技术方案:
一种无液压刹车的风电机组偏航控制系统,包括主控制器、主变频驱动器、若干从变频驱动器以及若干偏航电机,所述主控制器通过CANBUS总线与所述主变频驱动器连接,所述主变频驱动器和各从变频驱动器依次通过CANBUS总线进行连接,所述主变频驱动器和若干从变频驱动器分别通过连接线对应连接一个偏航电机,所述主控制器通过控制线分别与若干所述偏航电机的制动器连接。
本技术方案中,主控制器为PLC控制器,主变频驱动器通过CANBUS总线与主控PLC相连(用于给定频率、控制字、主从电机选择、电机力矩、电机电流、电机温度等信号传输);主变频驱动器与各从变频驱动器之间也通过CANopen通信方式传递信号(主、从变频驱动器选定是依据参数而设定的,实际为同型号的变频驱动器);同时各变频驱动器之间另外还有一条CANBUS总线相连专门用于偏航电机的同步控制,以确保各偏航电机出力均匀;变频驱动器与偏航电机采用一对一拖动的方式,电机制动器由主控PLC统一控制;本技术方案取消了传统偏航的液压刹车,取代液压刹车功能的是变频驱动控制同步电机产生的电磁阻尼力矩和电机自带的制动器力矩。该偏航系统在主、从偏航电机共同作用下,仅以偏航电机的扭矩保持机头位置固定,完全松开液压刹车进行无磨损偏航。偏航控制系统控制偏航电机经减速装置连接小齿轮,下方通过小齿轮与大齿轮啮合传动偏航。为保证风机在停止偏航时,不会因叶片受风载荷而被动偏离风向的情况,偏航电机制动器力矩的选型应根据风力发电机组具体载荷计算而选定。由于变频驱动器及同步电机的转矩响应速度远快于液压系统的响应速度,故可以在偏航的过程中根据风载变化情况灵活调整电磁阻尼,以取代液压刹车,实现无磨损偏航。
作为优化,所述主变频驱动器和各从变频驱动器均安装有制动电阻。
这样,各变频驱动器配备有制动电阻,用于消耗偏航电机处于阻尼状态时产生的电能,单个制动电阻功率的选取依据单个偏航电机功率而定(制动电阻功率的选型规格一般为对应偏航电机额定功率的20%~45%之间)。
作为优化,所述连接线包括动力线、旋变信号线、电机温度线。
作为优化,所述偏航电机安装有旋转变压器。
这样,偏航电机配备有旋转变压器用于速度反馈形成闭环控制,使系统具备零转速保持力矩的能力。
作为优化,所述主变频驱动器和若干从变频驱动器均为变频调速三相同步电机。
这样,选用变频调速三相同步电机做为偏航电机,其性能将大大优于传统的三相交流异步偏航电机,具有更稳定的转速和维持力矩。
由于无液压刹车偏航系统进行偏航时没有液压刹车阻尼力,为防止滑舱,甚至飞车,需进行如下的控制过程:
一种无液压刹车的风电机组偏航控制系统的控制方法,包括以下步骤:
S1、偏航开始前,接到主控制器发出的偏航命令,主变频驱动器和从变频驱动器为对应的偏航电机建立电磁维持力矩,力矩建立之后,偏航开始;
S2、偏航开始时,各偏航电机抱闸全松开,偏航系统进行低速齿隙补偿轻柔啮合消隙;
S3、消隙完成后,偏航系统依据主控制器的速度指令进行偏航,偏航过程中进行下垂控制,自动实现负载动态平衡;
S4、偏航系统到达主控制器指定角度时,主变频驱动器和各从变频驱动器进行扭矩控制保持机头位置,当偏航电机零转速时,对应的电机制动器全抱闸,至此偏航结束。
作为优化,所述步骤S3的具体步骤为:
S3.1、所述主变频驱动器根据主控制器命令以速度模式运行;
S3.2、所述主变频驱动器以5ms周期同步控制所述主变频驱动器和各从变频驱动器启停及运行频率;这样,可以保证所有偏航电机的同步性;
S3.3、所述主变频驱动器和各从变频驱动器根据自身转矩及下垂率进行下垂控制;
S3.4、变频驱动器的转矩越大其频率会更低,从而将转矩自动分配至其他偏航电机的电机轴上,最终达到动态平衡效果。
一种无液压刹车的风电机组偏航控制系统的控制方法采用以上技术方案与现有技术相比,具有以下技术效果:
1、偏航同步控制,负荷均衡分配,电流更均衡,减少打齿造成的齿轮损伤;
2、启动冲击电流小,低速大转矩,对机械结构冲击小;
3、偏航系统无需配备液压刹车系统,大大降低了产品成本;
4、无磨损偏航能有效减少风电机组的振动及噪音。
附图说明
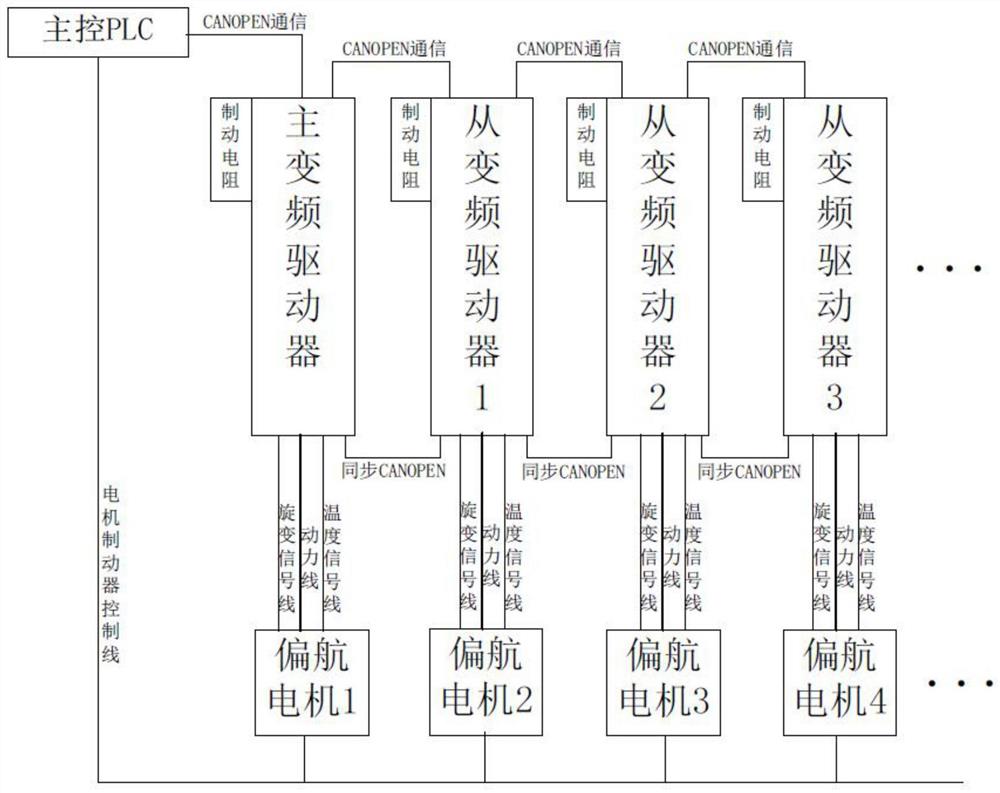
图1为本发明所述的一种无液压刹车的风电机组偏航控制系统的偏航系统结构示意图;
图2为本发明所述的一种无液压刹车的风电机组偏航控制系统的控制方法的流程图;
图3为本发明所述的一种无液压刹车的风电机组偏航控制系统的接口简图。
具体实施方式
下面结合附图对本发明作进一步的详细说明。在本发明的描述中,需要理解的是,方位词如“上、下、前、后、左、右”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
为了解决上述技术问题,本发明采用了如下的技术方案:
如图1所示,一种无液压刹车的风电机组偏航控制系统,包括主控制器、主变频驱动器、若干从变频驱动器以及若干偏航电机,所述主控制器通过CANBUS总线与所述主变频驱动器连接,所述主变频驱动器和各从变频驱动器依次通过CANBUS总线进行连接,所述主变频驱动器和若干从变频驱动器分别通过连接线对应连接一个偏航电机,所述主控制器通过控制线分别与若干所述偏航电机的制动器连接。
本技术方案中,主控制器为PLC控制器,由于目前的偏航系统都是用的大MW风机,四个电机起步,因此,从变频驱动器至少为3个,主变频驱动器通过通讯CANBUS总线与主控PLC相连(用于给定频率、控制字、主从电机选择、电机力矩、电机电流、电机温度等信号传输);主变频驱动器与各从变频驱动器之间也通过CANopen通信方式(通讯CANBUS总线)传递信号(主、从变频驱动器选定是依据参数而设定的,实际为同型号的变频驱动器);同时各变频驱动器之间另外还有一条CANBUS总线(同步CANBUS总线)相连专门用于偏航电机的同步控制,以确保各偏航电机出力均匀;变频驱动器与偏航电机采用一对一拖动的方式,电机制动器由主控PLC统一控制;本技术方案取消了传统偏航的液压刹车,取代液压刹车功能的是变频驱动控制同步电机产生的电磁阻尼力矩和电机自带的制动器力矩。该偏航系统在主、从偏航电机共同作用下,仅以偏航电机的扭矩保持机头位置固定,完全松开液压刹车进行无磨损偏航。偏航控制系统控制偏航电机经减速装置连接小齿轮,下方通过小齿轮与大齿轮啮合传动偏航。为保证风机在停止偏航时,不会因叶片受风载荷而被动偏离风向的情况,偏航电机制动器力矩的选型应根据风力发电机组具体载荷计算而选定。由于变频驱动器及同步电机的转矩响应速度远快于液压系统的响应速度,故可以在偏航的过程中根据风载变化情况灵活调整电磁阻尼,以取代液压刹车,实现无磨损偏航。
本实施例中,所述主变频驱动器和各从变频驱动器均安装有制动电阻。
这样,各变频驱动器配备有制动电阻,用于消耗偏航电机处于阻尼状态时产生的电能,单个制动电阻功率的选取依据单个偏航电机功率而定(制动电阻功率的选型规格一般为对应偏航电机额定功率的20%~45%之间)。
本实施例中,所述连接线包括动力线、旋变信号线、电机温度线。
本实施例中,所述偏航电机安装有旋转变压器。
这样,偏航电机配备有旋转变压器用于速度反馈形成闭环控制,通过旋转变压器,可以根据反馈值不断进行修正,使系统具备零转速保持力矩的能力,而开环控制无法做到这种精准控制,开环控制时即使偏离目标值了也无法知道。
本实施例中,所述主变频驱动器和若干从变频驱动器均为变频调速三相同步电机。
这样,选用变频调速三相同步电机做为偏航电机,其性能将大大优于传统的三相交流异步偏航电机,具有更稳定的转速和维持力矩。
由于无液压刹车偏航系统进行偏航时没有液压刹车阻尼力,为防止滑舱,甚至飞车,需进行如下的控制过程:
一种无液压刹车的风电机组偏航控制系统的控制方法,包括以下步骤:
S1、偏航开始前,接到主控制器发出的偏航命令,主变频驱动器和从变频驱动器为对应的偏航电机建立电磁维持力矩,力矩建立之后,偏航开始;
S2、偏航开始时,各偏航电机抱闸全松开,偏航系统进行低速齿隙补偿轻柔啮合消隙;这里的低速是指偏航电机的频率为7HZ。
S3、消隙完成后,偏航系统依据主控制器的速度指令进行偏航,偏航过程中进行下垂控制,自动实现负载动态平衡;
S4、偏航系统到达主控制器指定角度时,主变频驱动器和各从变频驱动器进行扭矩控制保持机头位置,当偏航电机零转速时,对应的电机制动器全抱闸,至此偏航结束。
因为风机是一直有风的外力,不能让电机处于不受控状态,因此,变频驱动器听从主控制器的角度指令主动控制电机轴停下来,并保持零速。
本实施例中,所述步骤S3的具体步骤为:
S3.1、所述主变频驱动器根据主控制器命令以速度模式运行;
S3.2、所述主变频驱动器以5ms周期同步控制所述主变频驱动器和各从变频驱动器启停及运行频率;这样,可以保证所有偏航电机的同步性;
S3.3、所述主变频驱动器和各从变频驱动器根据自身转矩及下垂率进行下垂控制;
S3.4、变频驱动器的转矩越大其频率会更低,从而将转矩自动分配至其他偏航电机的电机轴上,最终达到动态平衡效果。
主控制器为PLC控制器,以2.5MW风力发电机组有5个偏航电机为例,主控PLC可选用巴赫曼、倍福等品牌,主控PLC选型应考虑到可配置从站为5个以上,以确保5个变频驱动器从站能全部被配置;同时主控PLC需配至少有8路DI和8路DO模块,以确保偏航控制时有足够的输入输出接口。具体接口方式如图3所示,主控PLC有4路DI(包含手动/自动开关、右偏航、左偏航、故障复位)和1路DO(故障指示信号)接到手动操作面板,有1路DO控制用于所有变频驱动器故障复位(可通过2个三对触点的继电器实现),有1路DI(电机制动器信号反馈)和2路DO(可通过一个微型接触器和端子排组合同时控制5个偏航电机抱闸、加热)与偏航电机相连;主变频驱动器通过CANBUS总线与主控PLC相连(用于给定频率、控制字、主动电机选择、电机力矩、电机电流、电机温度等信号传输),变频驱动器与偏航电机相连的有旋变信号线、电机温度信号线以及电机动力电缆。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变动。
最后应说明的是:本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等统计数的范围之内,则本发明也意图包含这些改动和变型。