一种用于变桨控制系统防止接近开关误触发的方法
文献发布时间:2023-06-19 09:38:30
技术领域
本发明属于风力发电变桨控制技术领域,特别是涉及一种用于变桨控制系统防止接近开关误触发的方法。
背景技术
风力发电机组变桨控制系统接近开关大都采用单点实时触发,当轮毂内残留有铁屑、小铁块等感应物质时,在桨叶转动时容易因铁屑、小铁块等感应物质感应或接触接近开关感应头导致误触发接近开关,而非真正的感应块感应接近开关导致接近开关触发,从而引起系统的故障发生。目前,防止接近开关误触发的方法大都采用新增硬件条件实现,而在变桨控制系统中大都是实时接收和判断接近开关的触发状态,一旦误触发,容易导致整个机组故障停机。
发明内容
针对上述问题,本发明提供了一种用于变桨控制系统防止接近开关误触发的方法,在不新增硬件的条件下能够有效的判断接近开关是否发生误触发,并且能够准确的剔除误触发的情况使机组正常运行,从而降低风机的故障率。
为了解决上述技术问题,本发明采用了如下的技术方案:
一种用于变桨控制系统防止接近开关误触发的方法,利用桨叶角度采集装置采集接近开关触发时的角度,通过控制器进行分析、判断以防止接近开关误触发,所述桨叶角度采集装置包括变桨旋转变压器或变桨编码器、接近开关、接近开关感应块以及变桨控制器,具体包括以下步骤:
S1、当接近开关感应到接近开关感应块时,位置角度为φ
由变桨旋转变压器或变桨编码器进行采集位置角度φ
S2、当所述接近开关再次触发时,位置角度为φ;
再次触发时,桨叶角度采集装置处于正常状态;
S3、判断φ
S4、延时T之后判断接近开关是否处于触发状态,若接近开关未处于触发状态,则判断为误触发,系统正常运行,否则进入S5;
S5、判断接近开关处于异常触发状态,故障停机。
若经过时间T,接近开关还处于触发状态,则变桨控制器判断为接近开关真实触发状态,若在时间T之内接近开关恢复为未触发状态,则变桨控制器判断为接近开关误触发。
作为优化,在步骤S1之前,还要判断所述桨叶角度采集装置是否正常,若不正常,故障停机。
这样才能保证后续步骤的判断结果是正常的。
作为优化,所述延时T为100ms至500ms。
一种用于变桨控制系统防止接近开关误触发的方法采用以上技术方案与现有技术相比,具有以下技术效果:
1、此方法无需新增硬件条件,简单可靠,实用性强;
2、此方法能够有效的防止因为接近开关误触发而引起的风力发电机组停机所产生的影响,采用本方法能够有效的减少风力发电机组变桨控制系统因接近开关误触发而导致的故障,从而提高整个机组的运行效率;
3、此方法故障延时时间T可根据实际情况进行调整,时效性强。
附图说明
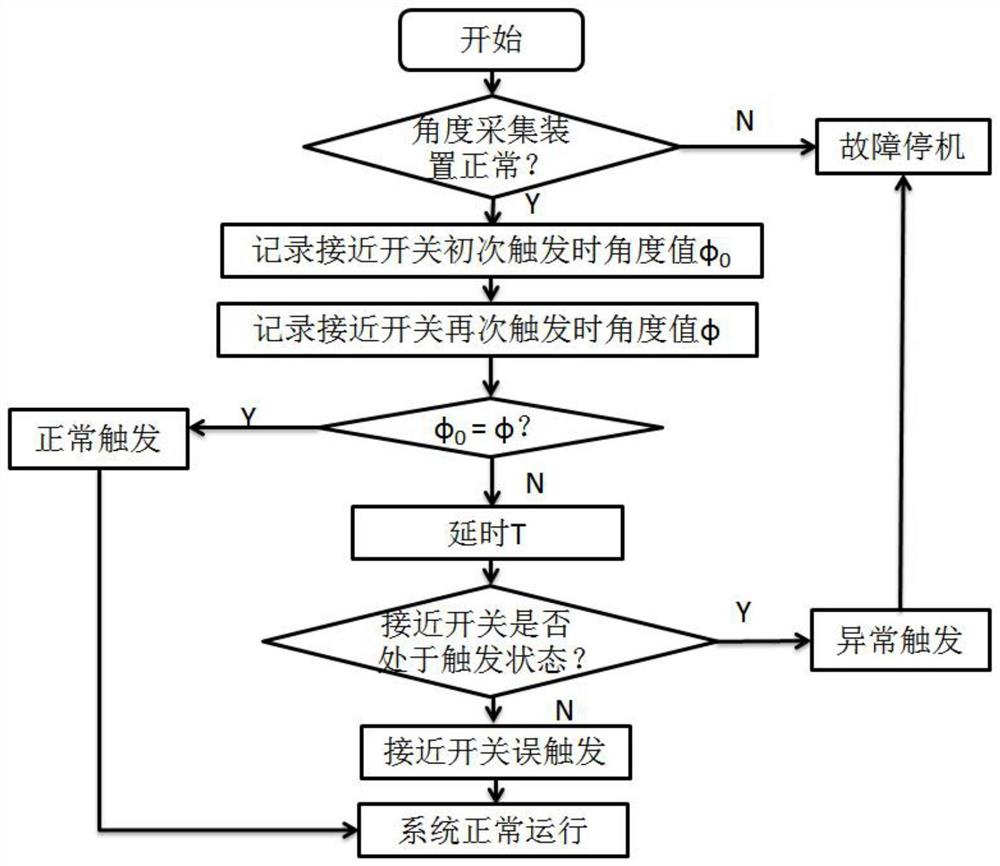
图1为本发明一种用于变桨控制系统防止接近开关误触发的方法的方法流程图。
具体实施方式
下面结合附图对本发明作进一步的详细说明。在本发明的描述中,需要理解的是,方位词如“上、下、前、后、左、右”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
为了解决上述技术问题,本发明采用了如下的技术方案:
如图1所示,一种用于变桨控制系统防止接近开关误触发的方法,利用桨叶角度采集装置采集接近开关触发时的角度,通过控制器进行分析、判断以防止接近开关误触发,所述桨叶角度采集装置包括变桨旋转变压器或变桨编码器、接近开关、接近开关感应块以及变桨控制器,所述接近开关固定安装于轮毂内侧,且与变桨柜内控制器电连接;所述桨叶角度采集装置处于变桨电机侧,且能正常将桨叶位置发送至变桨控制器;所述感应块安装于叶片内侧,跟随叶片的转动而产生位置变化,且当感应块与接近开关处于同一位置时,接近开关能够准确触发并将电信号发送给控制器。
变桨控制器记录当接近开关感应到接近开关感应块时桨叶角度采集装置所采集到的当前角度为初始位置角度φ
本方法可明确判断和区分接近开关处于正常触发、异常触发和误触发3种状态,并可阻止接近开关误触发导致机组故障停机的影响,增加机组的运行效率。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变动。
最后应说明的是:本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等统计数的范围之内,则本发明也意图包含这些改动和变型。