一种砌筑机
文献发布时间:2023-06-19 09:49:27
技术领域
本发明属于工程机械领域,具体涉及一种砌筑机。
背景技术
随着国民经济的发展、科学技术的进步,人们的生活水平不断地提高。社会资源分配也逐步在倾向智能、多能发展。利用机器辅助人工甚至取代人工已成为社会发展的终极目的。就现代土建行业,半自动、全自动、智能化现代机械设备层出不穷,为我国现代化建设做出了至关重要的贡献。我国工程机械经过漫长的发展,有了非常乐观的成果。伴随着高新科技的发展,工程机械的技术水平不断提高。“机电一体化工程机械”、“智能化工程机械”、“绿色发展工程机械”已是新时代工程机械的发展趋势。系统化,一体多用等都将引导行业有更高的发展。然而,我国工程机械以引进为主,造成我国技术化更新缓慢,缺乏竞争力。而且目前工程机械所需人工劳力较大,信息化与电子化投入较低导致我工程机械功能单一,资源整合度低。
发明内容
本发明的目的在于克服上述不足,提供一种砌筑机,可对以石块、砖等为建筑原料的建筑物、工程设施进行建造。机器自动化程度高,节约成本,人力配备少等优点。
为了达到上述目的,本发明包括上料系统、送料系统、辅助施工系统和落料施工系统;
上料系统包括砌筑基材筛选装置、砌筑基材上料装置和第一砌筑基材推料装置,砌筑基材筛选装置用于筛选符合要求的砌筑基材,并送至砌筑基材上料装置,上料装置将砌筑基材送至第一砌筑基材推料装置内;
送料系统包括X向送料装置和Y向送料装置,Y向送料装置一端连接第一砌筑基材推料装置,另一端连接X向送料装置,X向送料装置连接落料施工系统;
落料施工系统包括砌筑基材夹持装置和落料机构,砌筑基材夹持装置连接X向送料装置,砌筑基材夹持装置能够在辅助施工系统和施工面间移动;
辅助施工系统包括振动夯实装置和水泥砂浆输送装置,水泥砂浆输送装置用于对砌筑基材夹持装置上的砌筑基材进行浇注,振动夯实装置用于对浇注后的砌筑基材夯实。
砌筑基材筛选装置包括砌筑基材筛选机构、砌筑基材检测装置和砌筑基材砌面调整机构,砌筑基材筛选机构连接砌筑基材检测装置和砌筑基材砌面调整机构,砌筑基材检测装置用于检测砌筑基材是否到位,砌筑基材砌面调整机构用于加工砌筑基材的砌面;
砌筑基材上料装置包括砌筑基材上料机构,砌筑基材上料机构上设置有伸缩传送带,伸缩传送带连接第一砌筑基材推料装置,第一砌筑基材推料装置连接连接送料系统。
X向送料装置包括X向送料传送带,X向送料传送带上设置有第一砌筑基材到位检测装置和第二砌筑基材推料装置,Y向送料装置上设置有第二砌筑基材到位检测装置和第三砌筑基材推料装置。
上料系统、送料系统、辅助施工系统和落料施工系统均连接数据处理中心。
上料系统、送料系统、辅助施工系统和落料施工系统均固定在机体支架上。
机体支架上设置有机器人驾驶控制室,机体支架底部设置有中央回转机构,中央回转机构下设置有机器人行走支架,机器人行走支架下设置有行走底盘,行走底盘上设置有履带架。
机体支架内设置有机器人辅助系统,机器人辅助系统包括平衡机构,平衡机构连接平衡机构调节装置。
与现有技术相比,本发明通过上料系统对砌筑基材进行筛选,并送入送料系统,送料系统将砌筑基材送入落料施工系统进行水泥砂浆浇注,浇注夯实后通过落料施工系统送入施工面,本装置结合了筛选、送料、浇注为一体,集成性高,不需要大量人力劳动,节约了人力成本,缩短了工期,提高了劳动效率。
附图说明
图1为本发明的结构示意图;
图2为本发明中Y向送料装置的结构示意图;
图3为本发明中落料施工系统的结构示意图;
图4为本发明中砌筑基材夹持装置的结构示意图;
图5为本发明中驾驶控制室的结构示意图。
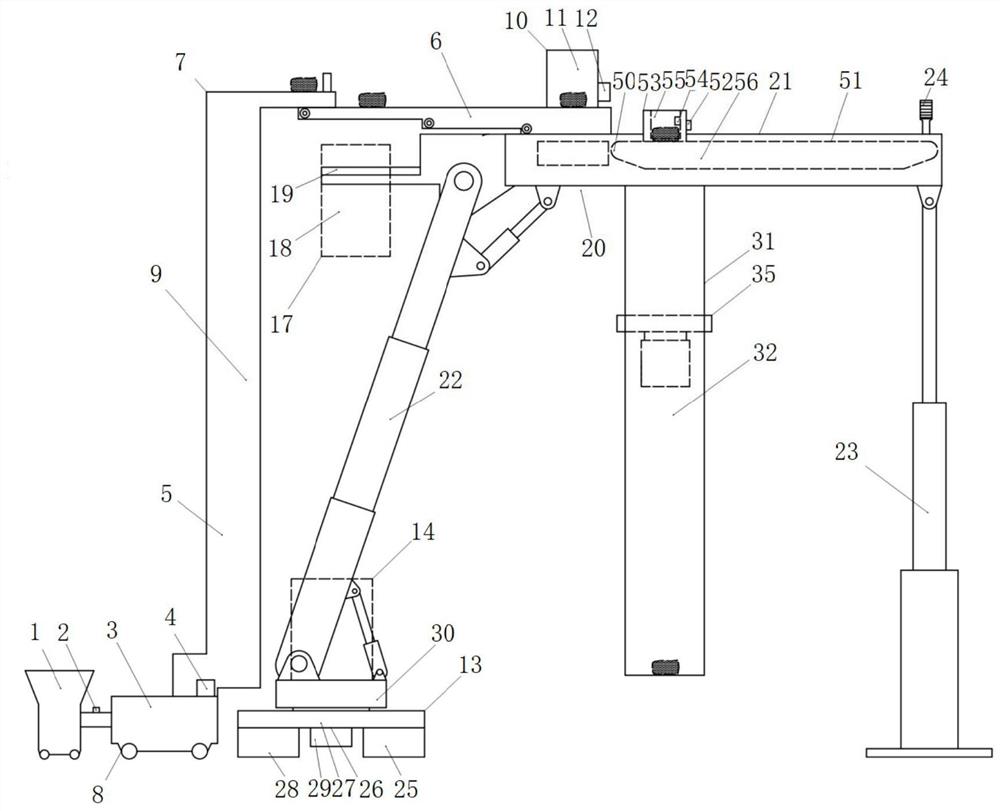
其中,1-砌筑基材筛选机构、2-砌筑基材筛选检测装置、3-砌筑基材砌面调整机构、4-砌筑基材检测装置、5-砌筑基材上料机构、6-伸缩传送带、7-上料系统、8-砌筑基材筛选装置、9-砌筑基材上料装置、10-第一砌筑基材推料装置、11-第一砌筑基材推料检测装置、12-第一砌筑基材推料机构、13-机体支架、14-机器人驾驶控制室、15-驾驶台、16-数据处理中心、17-机器人辅助系统、18-平衡机构、19-平衡机构调节装置、20-机器人工作支架、21-工作平台、22-工作平台升降系统、23-平台工作支撑系统、24-工作平台辅助系统、25-机器人行走之架、26-行走底盘、27-履带架、28-行走机构、29-底盘、30-中央回转机构、31-落料施工系统、32-砌筑基材落料施工装置、33-落料到位检测装置、34-落料机构、35-砌筑基材夹持装置、36-落料定位检测装置、37-砌筑基材砌面角度调整机构、38-砌筑基材砌面调整机构、39-夹紧机构、40-砌筑基材夹紧检测装置、41-辅助施工系统、42-振动夯实装置、43-振动机构、44-振动到位检测装置、45-水泥砂浆输送装置、46-水泥沙浆输送机构、47-水泥沙浆浇注到位检测装置、48-水泥砂浆抹平机构、49-水泥沙浆抹平检测装置、50-送料系统、51-X向送料装置、52-第一砌筑基材到位检测装置、53-第二砌筑基材推料装置、54-第二推料到位检测装置、55-第二砌筑基材推料机构、56-X向送料传送带、57-Y向送料装置、58-第二砌筑基材到位检测装置、59-第三砌筑基材推料装置、60-第三推料到位检测装置、61-第三砌筑基材推料机构、62-Y向送料传送带、63-砌筑基材。
具体实施方式
下面结合附图对本发明做进一步说明。
参见图1,本发明包括上料系统7、送料系统50、辅助施工系统41和落料施工系统31;
上料系统7包括砌筑基材筛选装置8、砌筑基材上料装置9和第一砌筑基材推料装置10,砌筑基材筛选装置8用于筛选符合要求的砌筑基材,并送至砌筑基材上料装置9,上料装置9将砌筑基材送至第一砌筑基材推料装置10内;
送料系统50包括X向送料装置51和Y向送料装置57,Y向送料装置57一端连接第一砌筑基材推料装置10,另一端连接X向送料装置51,X向送料装置51连接落料施工系统31;
落料施工系统31包括砌筑基材夹持装置35和落料机构34,砌筑基材夹持装置35连接X向送料装置51,砌筑基材夹持装置35能够在辅助施工系统41和施工面间移动;
辅助施工系统41包括振动夯实装置42和水泥砂浆输送装置45,水泥砂浆输送装置45用于对砌筑基材夹持装置35上的砌筑基材进行浇注,振动夯实装置42用于对浇注后的砌筑基材夯实。
砌筑基材筛选装置8包括砌筑基材筛选机构1、砌筑基材检测装置4和砌筑基材砌面调整机构3,砌筑基材筛选机构1连接砌筑基材检测装置4和砌筑基材砌面调整机构3,砌筑基材检测装置4用于检测砌筑基材是否到位,砌筑基材砌面调整机构3用于加工砌筑基材的砌面;
砌筑基材上料装置9包括砌筑基材上料机构5,砌筑基材上料机构5上设置有伸缩传送带6,伸缩传送带6连接第一砌筑基材推料装置10,第一砌筑基材推料装置10连接连接送料系统50。
X向送料装置51包括X向送料传送带56,X向送料传送带56上设置有第一砌筑基材到位检测装置52和第二砌筑基材推料装置53,Y向送料装置57上设置有第二砌筑基材到位检测装置58和第三砌筑基材推料装置61。
上料系统7、送料系统50、辅助施工系统41和落料施工系统31均连接数据处理中心16。
上料系统7、送料系统50、辅助施工系统41和落料施工系统31均固定在机体支架13上。
机体支架13上设置有机器人驾驶控制室14,机体支架13底部设置有中央回转机构30,中央回转机构30下设置有机器人行走支架25,机器人行走支架25下设置有行走底盘26,行走底盘26上设置有履带架27。
机体支架13内设置有机器人辅助系统17,机器人辅助系统17包括平衡机构18,平衡机构18连接平衡机构调节装置19。
参见图1和图2,上料系统7包括砌筑基材筛选机构1、砌筑基材筛选检测2、砌筑基材砌面调整机构3、砌筑基材检测4、砌筑基材上料机构5、伸缩传送带6、砌筑基材筛选装置8、砌筑基材上料装置9、第一砌筑基材推料装置10和第一砌筑基材推料检测装置11。上料系统的功用就是将砌筑基材进行筛选提升至送料系统上。整个过程自动检测识别、调整砌筑基材形态,确保符合施工要求。砌筑基材筛选机构1里面储存砌筑基材并进行筛选符合我们设定参数的砌筑基材,通过砌筑基材筛选检测2进行3D识别和检测并将数据传给数据处理中心16,通过砌筑基材砌面调整机构3时数据处理中心16发出命令致使砌筑基材砌面调整机构3工作达到满足要求的施工砌面。调整好的砌筑基材63经过砌筑基材筛选装置8提升砌筑基材63送至伸缩传送带6。其中砌筑基材检测装置4检测到砌筑基材63后。砌筑基材上料机构5工作将砌筑基材63送至伸缩传送带6。伸缩传送带6工作可将砌筑基材63送至第一砌筑基材推料装置10,第一砌筑基材推料装置10工作将砌筑基材63送至送料系统50。其中伸缩传送带6工作将砌筑基材63送至砌筑基材检测装置4检测到位后第一砌筑基材推料机构12工作将砌筑基材63送至送料系统50。
参见图2和图3,送料系统50包括X向送料装置51和Y向送料装置57。X向送料装置51包括第二砌筑基材到位检测装置52、第二砌筑基材推料装置53和X向送料传送带56,第二砌筑基材推料装置55包括第二推料到位检测54和第二砌筑基材推料机构55;Y向送料装置57包括第三砌筑基材到位检测装置58和第三砌筑基材推料装置59、Y向送料传送带62,第二砌筑基材推料装置59包括第三推料到位检测60和第三砌筑基材推料机构61。
待第一砌筑基材推料机构12工作将砌筑基材63送至X向送料装置51上的X向送料传送带56。X向送料传送带56工作将砌筑基材63送至第二砌筑基材到位检测52同时第二砌筑基材到位检测52感应识别后第二砌筑基材推料装置53工作,第二砌筑基材推料机构55正向工作将砌筑基材63送至Y向送料装置57同时第二推料到位检测54若检测识别响应后第二砌筑基材推料机构55反向回到初始位置。Y向送料装置57的Y向送料传送带62检测识别到砌筑基材63后会将砌筑基材63送至第二砌筑基材推料装置59同时第三砌筑基材到位检测58感应识别后第三砌筑基材推料机构61正向工作将砌筑基材63送至砌筑基材夹持装置35的夹紧机构39,然后待第二砌筑基材推料装置59的第三推料到位检测60检测识别后第三砌筑基材推料机构61反向工作回到初始位置。
参见图2至图5,落料施工系统31包括砌筑基材落料施工装置32和砌筑基材夹持装置35。其中砌筑基材落料施工装置32包括落料到位检测装置33和落料机构34,砌筑基材夹持装置35包括落料定位检测装置36、砌筑基材砌面角度调整机构37、砌筑基材砌面调整机构38、夹紧机构39和砌筑基材夹紧检测40。
待第三砌筑基材推料机构61将砌筑基材63送至夹紧机构39时,砌筑基材夹紧检测40首先对砌筑基材进行检测识别并反馈给数据处理中心16,其次夹紧机构39工作将砌筑基材夹紧,随后数据处理中心16发出命令给砌筑基材砌面调整机构38和砌筑基材砌面角度调整机构37,砌筑基材砌面调整机构38和砌筑基材砌面角度调整机构37同时工作达到适合的施工砌面和施工角度。落料机构34工作将砌筑基材夹持装置35送至施工地,同时落料到位检测装置33检测识别施工地并传给数据处理中心16,数据处理中心16处理后发出命令给砌筑基材夹持装置35的夹紧机构39工作将砌筑基材63放置于施工地上,最后落料机构34将砌筑基材夹持装置35提升到初始位置完成落料施工。
辅助施工系统41包括振动夯实装置42和水泥砂浆输送装置45。其中振动夯实装置42包括振动机构43和振动到位检测装置44;水泥砂浆输送装置45包含水泥沙浆输送机构46、水泥沙浆浇注到位检测47、水泥砂浆抹平机构48和水泥沙浆抹平检测49。
当夹紧机构39工作保持夹紧状态时,水泥沙浆输送机构46将水泥砂浆送至施工地上。通过水泥沙浆浇注到位检测47全方位的检测水泥是否浇注到位并将数据传给数据处理中心16。随后数据处理中心16发出实时命令水泥砂浆抹平机构48抹平水泥。水泥沙浆抹平检测49实时采集数据反馈给数据处理中心16,数据处理中心16控制水泥砂浆抹平机构48工作至达到落料施工标准。
当落料施工系统31完成放置砌筑基材63后振动夯实装置42开始工作。通过振动到位检测装置44采集数据并传给数据处理中心16。16-数据处理中心实时发出命令控制振动机构43工作至符合振动要求。
-机体支架13包括机器人驾驶控制室14、机器人辅助系统17、机器人工作支架20和机器人行走之架25。其中机器人驾驶控制室14包括驾驶台15和数据处理中心16;机器人辅助系统17包括平衡机构18和平衡机构调节装置19,机器人工作支架20包括工作平台21、工作平台升降系统22、平台工作支撑系统23和工作平台辅助系统24;机器人行走之架25包括行走底盘26和中央回转机构30、行走底盘26包括履带架27、行走机构28和底盘29。
(1)、机器人行走之架25完成设备正常的行进后退功能及工作平台的切换。行走底盘26确保设备正常的行进和后退,底盘29确保设备稳定。中央回转机构30可使工作平台21在360度绕工作平台升降系统22旋转切换工作平台21的位置。
(2)、机器人工作支架20中工作平台21上装有伸缩传送带6、送料系统50、落料施工系统31、辅助施工系统41。在设备进行施工时平台工作支撑系统23会打开并辅助支撑工作平台21确保施工安全及工作平台21的稳定性。工作平台辅助系统24主要是设备上的一些辅助装置(例如探照灯、警示装置、工具箱等)。工作平台升降系统22是保证工作平台21升降适应不同的施工高度。
(3)机器人辅助系统17包括平衡机构18和平衡机构调节装置19。平衡机构18是装在工作平台21相反一侧的重物平衡块。平衡机构调节装置19可使平衡机构18在一定的距离内移动实现不同的力矩达到平衡工作平台21的作用。
(4)机器人驾驶控制室14包括驾驶台15和数据处理中心16。驾驶台15是驾驶员操作台,数据处理中心16是对不同的传感器数据,检测器数据进行处理并发出不同的执行命令。
使用时,将足够多的砌筑基材63倒入砌筑基材筛选机构1中。启动设备,砌筑基材筛选机构1筛选出符合要求的砌筑基材,经砌筑基材筛选检测2检测识别并将数据传给数据处理中心16。数据处理中心16发出命令,砌筑基材砌面调整机构3工作使砌筑基材63达到适合施工的砌面。砌筑基材检测装置4检测到砌筑基材后启动砌筑基材上料装置9使砌筑基材63提升至伸缩传送带6。砌筑基材检测4检测到后,数据处理中心16发出命令启动伸缩传送带6。伸缩传送带6使砌筑基材63到达第一砌筑基材推料装置10,第一砌筑基材推料检测装置11接收到砌筑基材63后,第一砌筑基材推料机构12将砌筑基材63推至送料系统50。Y向送料装置57的Y向送料传送带62工作。第三砌筑基材到位检测58检测到砌筑基材63后第三砌筑基材推料装置59的第三砌筑基材推料机构61工作将砌筑基材63推至X向送料装置51。X向送料装置51的X向送料传送带56工作将砌筑基材63送到第二砌筑基材到位检测52检测识别位置后,第二砌筑基材推料机构55将砌筑基材63推至落料施工系统31的砌筑基材夹持装置35上。夹紧机构39正向工作将砌筑基材63夹紧,水泥砂浆输送装置45的水泥沙浆输送机构46工作,水泥沙浆浇注到位检测47实时反馈给数据处理中心16,数据处理中心16实时控制水泥沙浆输送机构46工作至水泥量满足修砌标准随后水泥砂浆抹平机构48工作至水泥沙浆抹平检测49检测满足修砌标准为止。落料机构34工作将砌筑基材夹持装置35送至施工面上,落料到位检测33检测识别后数据处理中心16发出命令使夹紧机构39反向工作砌筑基材63放置在施工面上。振动机构43工作同时振动到位检测44检测合格后完成单块砌筑基材63的修筑。以此类推完成每层的修筑要求。
- 一种砌筑方法、砌筑系统及砌筑机器人
- 一种砌筑板和由所述砌筑板组成的砌筑体