一种用于大直径贮箱筒段环缝焊接的蛇形内支撑装置
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及大型薄壁圆筒构件环缝焊接内支撑技术领域,尤其涉及一种用于大直径贮箱筒段环缝焊接的蛇形内支撑装置。
背景技术
大直径贮箱的高精度焊接是重型运载火箭装配制造的关键技术与难题。现阶段,贮箱由两个箱底和多个筒段以焊接的形式拼接而成,常采取搅拌摩擦焊的形式。巨大的搅拌头顶锻力作用于焊接贮箱筒壁,会造成筒壁严重变形以及不可忽视的误差。因此,在焊接工艺中,内部安置支撑校形机构保证整个贮箱在焊接过程中的形状与位置精度具有重要意义。
现有技术中贮箱筒段的环缝内撑装置,多采用杆系支撑装置、心轴和过渡支撑的形式,在过渡支撑上装调节内撑结构,并且通过调节杆系支撑装置在心轴上的位置适应不同的筒段。然而,对于重型火箭的贮箱焊接工艺过程,所需要的内支撑顶锻力大大提升,按照已有的构型制造环缝内支撑机构,无法做到自动化内撑功能的实现。
在完成焊接后,内撑机构需要从人孔由贮箱内部退出,已有的内撑机构结构笨重复杂,难以自主退出,现多采用人工辅助拆卸内撑机构,但是,对于大型火箭贮箱制造,尤其是10m级重型火箭,人工从人孔借助吊索机构进入,具有极大的危险性并且机构拆卸难度大,效率低。
现有技术中专利CN108080877A公开了一种贮箱筒段环缝自动焊内撑装置,包括:主轴,花盘;所述花盘通过衬套与主轴固定连接,且表面具有径向安装的多条直线导轨;所述导轨连接弧形内撑块,形成完整圆周。但该装备无法实现整体自主运动,在焊接完成后,需要通过辅助拆卸装置从贮箱人孔中退出。
因此,本领域的技术人员致力于开发一种用于大直径贮箱筒段环缝焊接的蛇形内支撑装置。
发明内容
有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种用于大型火箭贮箱筒焊接的内撑装置,能够在筒段进行环缝焊接工作时,为整个筒段提供高强度的支撑,又能在焊接工作完成后,具有灵活的运动性能,自主从贮箱内部退出。
为实现上述目的,本发明提供了一种用于大直径贮箱筒段环缝焊接的蛇形内支撑装置,使用模块化设计方法,结构简单、维护方便。
本发明通过以下技术方案实现:一种用于大直径贮箱筒段环缝焊接的蛇形内支撑装置,包括中间单元、首段单元、尾段单元、中间连接模块和首尾自锁模块;其中,所述各单元为壳体结构,所述中间连接模块位于所述各单元壳体内部,并依次将所述首段单元、多个所述中间单元和所述尾段单元相连;所述首尾自锁模块位于所述首段单元与所述尾段单元之间;所述尾段单元中与所述首段单元相邻的一侧,端部为带缺口的结构;
所述中间连接模块通过自锁状态与运动状态的转换,分别控制所述中间单元的密贴锁死与自由活动;所述首尾自锁模块通过自锁状态与断开状态的转换,分别控制所述首段单元与所述尾段单元的密贴自锁与活动打开,进而控制所述蛇形内撑装置的整周圆环态与自由运动态;
当所述中间连接模块与所述首尾自锁模块处于所述自锁状态时,所述各单元外周沿周向相互贴合,形成连续封闭的内撑圆环,所述内撑圆环沿所述贮箱筒段内壁周向排布,与所述贮箱筒段内壁相接触,提供高刚度内撑,实现所述贮箱筒段环缝焊接内部支撑的功能;
当所述首尾自锁模块处于所述断开状态时,所述蛇形内支撑装置呈超冗余自由度状态,具有灵活的运动性能,能够通过所述贮箱的人孔,自主从所述贮箱内部退出。
进一步地,所述中间单元、所述首段单元和所述尾段单元均为扇形结构,所述扇形的内弧半径值与外弧半径值根据所述贮箱筒段的规格及尺寸进行设计。
进一步地,所述中间连接模块采用两个运动副,其中一个运动副实现所述中间连接模块在所述自锁状态与所述运动状态的转换,另一个运动副实现所述中间连接模块处于所述运动状态时两个所述中间单元的位姿调节。
进一步地,在本发明的较佳实施方式中,所述两个运动副采用P-U副,其中P副为直线运动副,U副为方向相互垂直的两个旋转副。
进一步地,所述P-U副包括第一舵机支架、第一舵机U形连接件、第一驱动舵机、第一舵机U形臂、第二舵机U形臂、第二驱动舵机、第二舵机U形连接件、滑块连接件、滑块、滚珠丝杠、第三驱动舵机和导轨。
进一步地,所述导轨固定于所述中间单元上,所述滑块通过所述第三驱动舵机的转动,沿着所述导轨带动所述滑块连接件做直线运动,使两个所述中间单元由相互接触转换为具有一定间隙,从而使所述中间单元由密贴锁死转换为自由活动;同时,所述第一驱动舵机与所述第二驱动舵机,分别驱动所述第一舵机U形臂与所述第二舵机U形臂绕舵机轴旋转运动,从而实现两个所述中间单元之间的相对位姿调节。
进一步地,在本发明的另一较佳实施方式中,所述两个运动副采用的形式包括但不限于R副(旋转运动副)和S副(球副)。
进一步地,所述首尾自锁模块通过直线运动机构实现。
进一步地,在本发明的较佳实施方式中,所述首尾自锁模块采用两条支链并联机构,所述两条支链垂直布置,均为RRR,即2-RRR形式。
进一步地,所述首尾自锁模块包括自锁机构基座、并联支链杆件、自锁机构驱动、自锁机构动平台、自锁机构连接臂和自锁块。
进一步地,所述首尾自锁模块通过沿竖直方向的直线运动,将所述自锁块压入所述尾段单元的缺口中,进入所述自锁状态;当所述首尾自锁模块需要断开时,将所述自锁块反向运动即可。
进一步地,在本发明的另一较佳实施方式中,所述首尾自锁模块采用的形式包括但不限于曲柄滑块机构和丝杠导轨直线运动机构。
本发明的有益效果是:提供了一种大直径贮箱筒段环缝焊接的蛇形内支撑装置,具有灵活的运动能力,能够自主从贮箱人孔中出入,避免了贮箱内撑装置拆卸的繁琐步骤;并且蛇形内支撑装置在焊接工作中沿贮箱周向布置,首尾单元自锁,中间单元之间互相贴合,形成整周圆环,能够提供足够的结构强度和刚度内支撑,可满足贮箱筒段环缝焊接工艺的装夹定位要求。
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
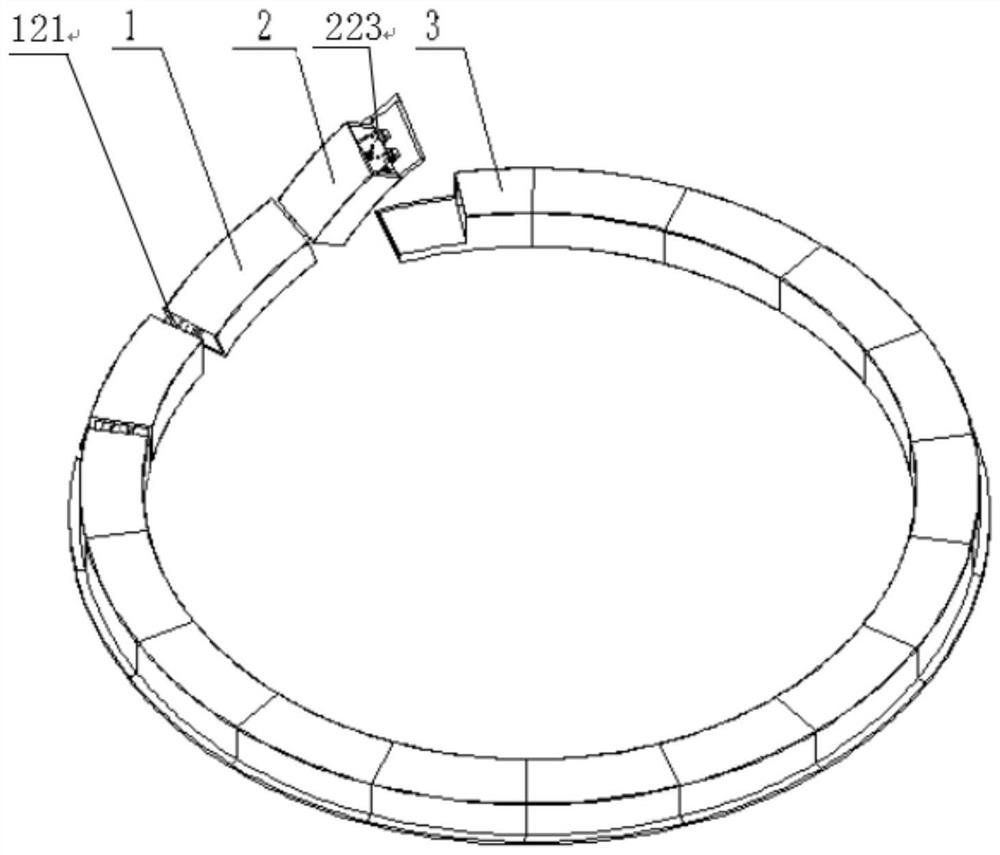
图1是本发明的一个较佳实施例整体结构示意图;
图2是本发明的一个较佳实施例形成连续整周圆环状态安装于贮箱中的示意图;
图3是本发明的一个较佳实施例P-U形式中间连接模块自锁状态示意图;
图4是本发明的一个较佳实施例P-U形式中间连接模块运动状态示意图;
图5是本发明的一个较佳实施例2-RRR形式首尾自锁模块断开示意图;
图6是本发明的一个较佳实施例2-RRR形式首尾自锁模块锁定示意图;
图7是本发明的一个较佳实施例2-RRR形式局部示意图。
附图中:1-中间单元,2-首段单元,3-尾段单元,4-人孔,5-第一舵机支架,6-第一舵机U形连接件,7-第一驱动舵机,8-第一舵机U形臂,9-第二舵机U形臂,10-第二驱动舵机,11-第二舵机U形连接件,12-滑块连接件,13-滑块,14-滚珠丝杠,15-第三驱动舵机,16-导轨,17-自锁机构基座,18-并联支链杆件,19-自锁机构驱动,20-自锁机构动平台,21-自锁机构连接臂,22-自锁块,121-中间连接模块,223-首尾自锁模块。
具体实施方式
以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
如图1所示,本发明提供了一种大直径贮箱筒段环缝焊接的蛇形内支撑装置,包括中间单元1、首段单元2、尾段单元3、中间连接模块121和首尾自锁模块223;其中,中间单元1、首段单元2和尾段单元3均为扇形壳体结构,扇形壳体的内弧半径值与外弧半径值依据贮箱筒段的规格及尺寸进行设计,尾段单元3的端部(与首段单元2相邻一侧)为带缺口的结构。中间连接模块121位于各单元壳体内部,并依次将首段单元2、多个中间单元1和尾段单元3相连;首尾自锁模块223位于首段单元2与尾段单元3之间。
中间单元1的数量为N个,中间连接模块121的数量为N+1个,其中N>1,具体数值与贮箱筒段的结构型式及中间单元1的尺寸规格有关。
中间连接模块121可进行自锁状态与运动状态的转换,分别控制中间单元1的密贴锁死与自由活动;首尾自锁模块223可进行自锁状态与断开状态的转换,分别控制首段单元2与尾段单元3的密贴自锁与活动打开,进而控制蛇形内撑装置的整周圆环态与自由运动态。
当首尾自锁模块223处于断开状态时,蛇形内支撑装置呈超冗余自由度状态,具有灵活的运动性能,能够通过贮箱人孔4,自主从贮箱内部退出。
如图2所示,当中间连接模块121与首尾自锁模块223处于自锁状态时,各单元外周沿周向相互贴合,形成连续封闭的内撑圆环,内撑圆环沿贮箱筒段内壁周向排布,与贮箱筒段内壁相接触,提供高刚度内撑,实现贮箱筒段环缝焊接内部支撑的功能。
如图3和图4所示,中间连接模块121固定于中间单元1的壳体内部下平面上,采用P-U形式的运动副,其中,P副为直线运动副,实现中间连接模块121在自锁状态与运动状态的转换;U副为方向相互垂直的两个旋转副,实现中间连接模块121处于运动状态时两个中间单元1的位姿调节。包括第一舵机支架5、第一舵机U形连接件6、第一驱动舵机7、第一舵机U形臂8、第二舵机U形臂9、第二驱动舵机10、第二舵机U形连接件11、滑块连接件12、滑块13、滚珠丝杠14、第三驱动舵机15和导轨16。其中,导轨16固定于中间单元1上,滑块13通过第三驱动舵机15转动,沿着导轨16带动滑块连接件12做直线运动,使两个中间单元1由相互接触转换为具有一定间隙,从而使中间单元1由密贴锁死转换为自由活动;同时,第一驱动舵机7与第二驱动舵机10,分别驱动第一舵机U形臂8与第二舵机U形臂9绕舵机轴旋转运动,从而实现两个所述中间单元1之间的相对位姿调节。
另外,中间连接模块121中的两个运动副采用的形式还包括但不限于R副(旋转运动副)和S副(球副)。
如图5、图6和图7所示,首尾自锁模块223通过直线运动机构实现,采用两条支链并联机构,两条支链垂直布置,均为RRR,即2-RRR形式。包括自锁机构基座17、并联支链杆件18、自锁机构驱动19、自锁机构动平台20、自锁机构连接臂21和自锁块22。其中,首尾自锁模块223通过沿竖直方向的直线运动,将自锁块22压入尾段单元3的缺口中,即可完成自锁过程;当首尾自锁模块223需要断开时,将自锁块22反向运动即可。
另外,首尾自锁模块223采用的形式还包括但不限于曲柄滑块机构和丝杠导轨直线运动机构。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。