一种风电机组偏航姿态控制系统及方法
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及风力发电机技术领域,具体而言,涉及一种风电机组偏航姿态控制系统及方法。
背景技术
风力发电机的偏航系统主要是通过控制转子的方向,保证风力发电机面对风向,从而最大程度地捕捉风能。就目前而言,由于风的状态多变,导致了风向的不确定性较高,偏航系统常常需要根据实时的风况数据随时启停,一方面容易影响风力发电机的稳定运行,另一方面长时间频繁启停偏航系统也容易导致其损坏,造成严重的经济损失。基于此,为了提高风电机组运行的稳定性,我们设计了一种风电机组偏航姿态控制系统及方法。
发明内容
本发明的目的在于提供一种风电机组偏航姿态控制系统及方法,其结合了BP模型与PSO算法构建风况预测模型,能够有效预测下一时间段的风况,并且结合了预设的偏航系统控制逻辑,根据每个时间段的平均值综合调控偏航系统,有效克服了长时间频繁启停偏航系统容易导致的损坏或故障,提高了风电机组运行的稳定性。
本发明的实施例通过以下技术方案实现:
一种风电机组偏航姿态控制系统,包括:
风况获取模块:获取风电机组的历史运行环境数据,并通过特征提取,得到风电机组的历史风况数据,对风电机组的历史风况数据进行归一化处理后,分为训练集与测试集;
风况预测模块:构建风况预测模型,以训练集对风况预测模型进行迭代训练,直至迭代结束后,以测试集对风况预测模型进行评估,得到完成训练的风况预测模型,通过风况预测模型基于风电机组的实时运行环境数据进行预测,获取风况预测数据;
偏航控制模块:基于当前风况数据及输入的风况预测数据,同时结合风况数据的最大值,执行风电机组的偏航系统控制逻辑,调整风电机组的偏航系统姿态,直至对风完成后,停止偏航。
可选的,所述风况获取模块内预设有预处理子模块,所述预处理子模块用于对风电机组的历史运行环境数据进行预处理,以便进行特征提取。
可选的,所述对风电机组的历史风况数据进行归一化处理,所述归一化处理的具体计算公式为:
其中,Q
可选的,所述风况预测模型的具体训练过程如下:
所述风况预测模型由BP神经网络模型及PSO算法组合构建,
初始化风况预测模型的PSO参数,包括PSO个数、最大迭代次数、局部学习因子及全局学习因子大小,并在初始化取值范围随机获取PSO初始位置及速度,同时构建风况预测模型训练过程中的适应度函数,并通过适应度函数迭代更新PSO的参数;
判定迭代是否停止,若否,则继续迭代,直至达到最大迭代次数;若是,则判定迭代次数是否达到最大迭代次数,若否,则返回上一步骤,直至达到最大迭代次数;若是,则完成风况预测模型的正向传播,并通过梯度反向传播更新风况预测模型的参数;
待反向传播完成后,输出完成训练的风况预测模型,并基于测试集对完成训练的风况预测模型进行评估,基于评估结果输出完成训练的风况预测模型。
可选的,所述构建风况预测模型训练过程中的适应度函数,所述适应度函数具体计算公式如下:
其中,E
可选的,所述风况数据具体为风向及风速数据。
可选的,所述风电机组的偏航系统控制逻辑中设定有风速数据的第一设定值A、第二设定值B及第三设定值C,所述第一设定值A具体为最小值,第二设定值B具体为标准值,第三设定值C具体为最大值,其具体步骤包括:
基于当前风况数据设定第一时间段,并求解第一时间段内的当前风向数据的平均值,并计算当前风向数据的平均值与风电机组的机舱之间的偏差角度;
基于求解的偏差角度绝对值判定是否低于偏航系统的最小偏航角度,若低于,则不启动偏航系统;若大于或等于,则进入下一步骤;
通过完成训练的风况预测模型对当前风况数据进行预测,获取第二时间段的风向及风速数据;
判断风速数据是否小于第一设定值A,若是,则停止风电机组的偏航系统启动;若否,则判断风速数据是否位于第一设定值A与第二设定值B之间,若是,则启动风电机组的偏航系统,以预设的第一偏航速度控制风电机组的偏航系统执行偏航,直至风速数据低于第一设定值A,停止风电机组的偏航系统;若否,则判断风速数据是否位于第二设定值B与第三设定值C之间,若否,则判定为风速数据大于第三设定值C,停止启动风电机组的偏航系统,若是,则启动风电机组的偏航系统,以预设的第二偏航速度控制风电机组的偏航系统执行偏航,直至风速数据低于第一设定值A,停止风电机组的偏航系统。
一种风电机组偏航姿态控制方法,该方法的步骤包括:
获取风电机组的历史运行环境数据,并通过特征提取,得到风电机组的历史风况数据,对风电机组的历史风况数据进行归一化处理后,分为训练集与测试集;
构建风况预测模型,以训练集对风况预测模型进行迭代训练,直至迭代结束后,以测试集对风况预测模型进行评估,得到完成训练的风况预测模型,通过风况预测模型基于风电机组的实时运行环境数据进行预测,获取风况预测数据;
基于当前风况数据及输入的风况预测数据,同时结合风况数据的最大值,执行风电机组的偏航系统控制逻辑,调整风电机组的偏航系统姿态,直至对风完成后,停止偏航。
本发明实施例的技术方案至少具有如下优点和有益效果:
本发明实施例结合了BP模型与PSO算法构建风况预测模型,能够有效预测下一时间段的风况,并且结合了预设的偏航系统控制逻辑,根据每个时间段的平均值综合调控偏航系统,有效克服了长时间频繁启停偏航系统容易导致的损坏或故障,提高了风电机组运行的稳定性。
附图说明
图1为本发明实施例提供的一种风电机组偏航姿态控制系统的原理示意图;
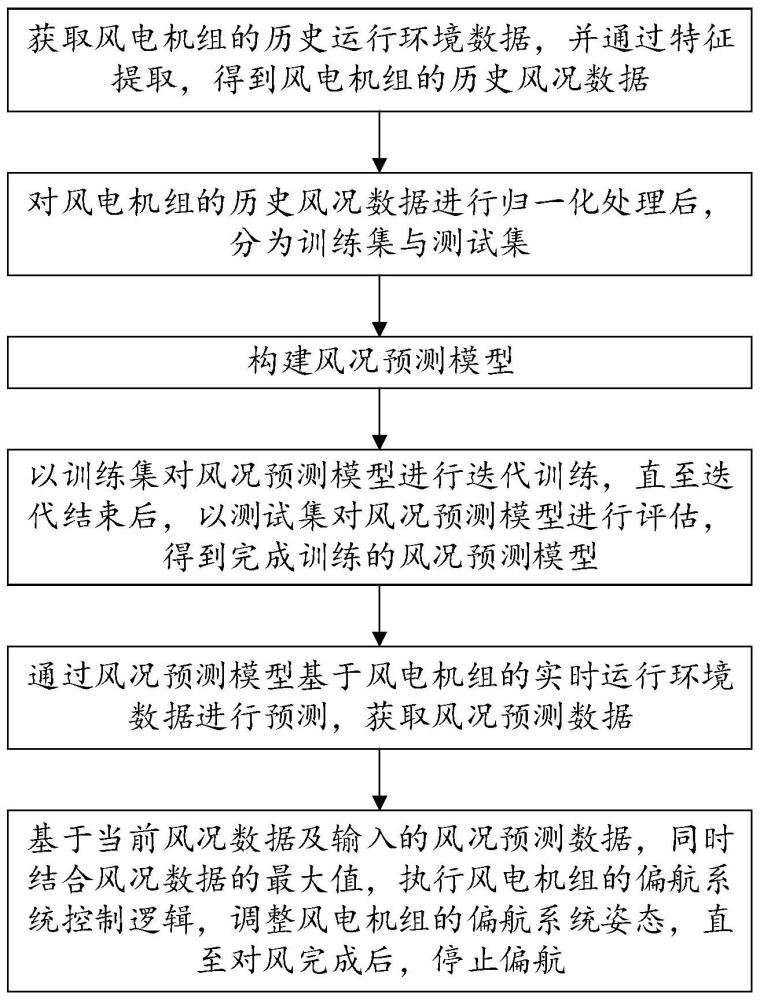
图2为本发明实施例提供的一种风电机组偏航姿态控制方法的流程示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
如图1所示,本发明提供了其中一种实施例:一种风电机组偏航姿态控制系统,包括:
风况获取模块:获取风电机组的历史运行环境数据,并通过特征提取,得到风电机组的历史风况数据,对风电机组的历史风况数据进行归一化处理后,分为训练集与测试集;
风况预测模块:构建风况预测模型,以训练集对风况预测模型进行迭代训练,直至迭代结束后,以测试集对风况预测模型进行评估,得到完成训练的风况预测模型,通过风况预测模型基于风电机组的实时运行环境数据进行预测,获取风况预测数据;
偏航控制模块:基于当前风况数据及输入的风况预测数据,同时结合风况数据的最大值,执行风电机组的偏航系统控制逻辑,调整风电机组的偏航系统姿态,直至对风完成后,停止偏航。
在本实施例中,所述风况获取模块内预设有预处理子模块,所述预处理子模块用于对风电机组的历史运行环境数据进行预处理,以便进行特征提取。
可以理解的,预处理子模块中所预设的数据预处理,包含数据清洗、异常数据去除等步骤,用于对风电机组的历史数据进行处理,以便提取风电机组的历史风况数据。
具体的,所述对风电机组的历史风况数据进行归一化处理,所述归一化处理的具体计算公式为:
其中,Q
在本实施例中,所述风况预测模型的具体训练过程如下:
所述风况预测模型由BP神经网络模型及PSO(粒子群)算法组合构建,
初始化风况预测模型的PSO参数,包括PSO个数、最大迭代次数、局部学习因子及全局学习因子大小,并在初始化取值范围随机获取PSO初始位置及速度,同时构建风况预测模型训练过程中的适应度函数,并通过适应度函数迭代更新PSO的参数;
判定迭代是否停止,若否,则继续迭代,直至达到最大迭代次数;若是,则判定迭代次数是否达到最大迭代次数,若否,则返回上一步骤,直至达到最大迭代次数;若是,则完成风况预测模型的正向传播,并通过梯度反向传播更新风况预测模型的参数;
待反向传播完成后,输出完成训练的风况预测模型,并基于测试集对完成训练的风况预测模型进行评估,基于评估结果输出完成训练的风况预测模型。
具体的,所述构建风况预测模型训练过程中的适应度函数,所述适应度函数具体计算公式如下:
其中,E
更为具体的,所述风况数据具体为风向及风速数据。
在本实施例中,所述风电机组的偏航系统控制逻辑中设定有风速数据的第一设定值A、第二设定值B及第三设定值C,所述第一设定值A具体为最小值,第二设定值B具体为标准值,第三设定值C具体为最大值,其具体步骤包括:
基于当前风况数据设定第一时间段,并求解第一时间段内的当前风向数据的平均值,并计算当前风向数据的平均值与风电机组的机舱之间的偏差角度;
基于求解的偏差角度绝对值判定是否低于偏航系统的最小偏航角度,若低于,则不启动偏航系统;若大于或等于,则进入下一步骤;
通过完成训练的风况预测模型对当前风况数据进行预测,获取第二时间段的风向及风速数据;
判断风速数据是否小于第一设定值A,若是,则停止风电机组的偏航系统启动;若否,则判断风速数据是否位于第一设定值A与第二设定值B之间,若是,则启动风电机组的偏航系统,以预设的第一偏航速度控制风电机组的偏航系统执行偏航,直至风速数据低于第一设定值A,停止风电机组的偏航系统;若否,则判断风速数据是否位于第二设定值B与第三设定值C之间,若否,则判定为风速数据大于第三设定值C,停止启动风电机组的偏航系统,若是,则启动风电机组的偏航系统,以预设的第二偏航速度控制风电机组的偏航系统执行偏航,直至风速数据低于第一设定值A,停止风电机组的偏航系统。
在上述应用中,本实施例所设定的第一时间段可以理解为偏航时间最大值,后续包括第二时间段、第三时间段、…、第N时间段均与第一时间段的长度一致,风速的第一设定值A、第二设定值B及第三设定值C,可以理解为第一设定值A对应偏航系统启动风速,第二设定值B对应偏航系统标准风速、第三设定值C对应偏航系统的风速阈值,上述逻辑基于此所设定,具体的,第一设定值A、第二设定值B及第三设定值C示例为:第一设定值A具体为2.5米每秒,第二设定值B具体为6米每秒,第三设定值C具体为20米每秒,风向至少达到偏航系统的最小偏航角度3度。
如图2所示,本发明还提供了另一种实施例:一种风电机组偏航姿态控制方法,该方法的步骤包括:
获取风电机组的历史运行环境数据,并通过特征提取,得到风电机组的历史风况数据,对风电机组的历史风况数据进行归一化处理后,分为训练集与测试集;
构建风况预测模型,以训练集对风况预测模型进行迭代训练,直至迭代结束后,以测试集对风况预测模型进行评估,得到完成训练的风况预测模型,通过风况预测模型基于风电机组的实时运行环境数据进行预测,获取风况预测数据;
基于当前风况数据及输入的风况预测数据,同时结合风况数据的最大值,执行风电机组的偏航系统控制逻辑,调整风电机组的偏航系统姿态,直至对风完成后,停止偏航。
可以理解的,本实施例所提供风电机组偏航姿态控制方法与上述实施例所提供的风电机组偏航姿态控制系统出于相同的发明构思,关于本发明实施例中各个模块更加具体的工作原理参考上述实施方式,在本发明实施例中不做赘述。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。