一种智能肌肉注射设备
文献发布时间:2023-06-19 09:36:59
技术领域
本发明涉及医疗设备领域,尤其涉及一种智能肌肉注射设备。
背景技术
现有的注射方式一般分为四种:静脉注射、肌肉注射、皮下注射、皮内注射,当不宜或不能做静脉注射,要求比皮下注射更迅速发生疗效时,以及注射刺激性较强或药量较大的药物时,则需要进行肌肉注射,肌肉注射最常用的注射部分为臀大肌,其次为臀中肌、臀小肌、股外侧肌及三角肌。
随着生活水平的提高,医疗设施也越来越完善,肌肉注射治疗也越来越普遍,但是相比较我国众多的人口基数,医患比例还是显得有些不足,所以现急需一种能够方便高效进行肌肉注射的设备。
发明内容
本发明针对上述背景技术中的情况,提供了一种智能肌肉注射设备,通过智能化的识别和传动机构的组合,能够更精准高效的进行肌肉注射。
为了解决上述技术问题,本发明通过下述技术方案得以解决:一种智能肌肉注射设备,包括躺板、平板、注射机构和换药机构,所述平板上设有第二通槽,所述平板一端通过第一连杆固定有转柱,所述躺板一侧固定有第一电机和固定套管,所述转柱与所述固定套管配合,所述转柱一端与所述第一电机连接,所述注射机构包括上药机构、气缸组,所述气缸组通过固定块与上药机构连接,所述气缸组通过第三电机与所述平板连接,所述换药机构包括装针盒、齿轮机构、凸轮机构、曲柄滑块机构和转盘,所述装针盒与第一固定杆一端铰接,所述第一固定杆另一端与所述躺板后侧固定连接,所述装针盒上设有第二滑槽和第三滑槽,所述曲柄滑块机构包括销轴、延伸杆、导套、导杆和滑块,所述滑块与所述第三滑槽配合,所述滑块与所述导杆铰接,所述导杆与所述导套配合,所述导套与延伸杆铰接,所述齿轮机构包括主动齿轮和被动齿轮,所述延伸杆通过所述销轴与所述被动齿轮偏心连接,所述被动齿轮与所述主动齿轮配合,所述主动齿轮通过第一转轴与第二电机连接,所述第二电机与所述躺板后侧固定连接,所述第一转轴上还固定有所述转盘,所述转盘上设有固定槽、弹性片和第三通槽,所述凸轮机构包括凸轮和顶杆,所述凸轮通过固定套与所述第二电机固定,所述顶杆与所述第三通槽配合,所述顶杆顶端与所述凸轮配合。
优选的,所述躺板上部分设有第一滑槽、挡板和滑板,所述挡板通过所述滑板与所述第一滑槽滑动连接,所述躺板底部还设有踏板和第一通槽。
优选的,所述上药机构包括第三气缸、第四气缸、弹板和固定板,所述第三气缸和所述第四气缸都与所述固定块连接,所述第三气缸和所述第四气缸还与所述固定板连接,所述固定板上端固定有第二卡块,所述第二卡块上设有第二卡槽和第一凹槽,所述固定板下端固定有第三卡块,所述第三卡块上设有第二凹槽,所述第三气缸上安装有第三活塞杆,所述第三活塞杆上固定有第二连杆,所述第二连杆通过第三固定杆与第一卡块连接,所述第一卡块上设有第一卡槽,所述第四气缸上安装有第四活塞杆,所述第四活塞杆上固定有第三连杆,所述第三连杆上设有第三凹槽,所述固定板内侧安装有所述弹板,所述弹板两端设有第四滑槽,所述固定板内侧两端还设有第四卡块,所述第四卡块与所述第四滑槽配合,所述弹板之间还固定安装有第二弹簧。
优选的,注射器包括管体、活塞柄、针管挡、针头和针帽。
优选的,所述注射器与所述上药机构配合,所述活塞柄与所述第一卡槽配合,所述活塞柄与所述第二卡槽配合,所述管体与所述弹板配合,所述针头与所述第三凹槽配合,所述针帽与所述第四凹槽配合。
优选的,所述装针盒内设有阶梯槽,所述装针盒端部设有挡片,所述第二滑槽与所述活塞柄配合,所述装针盒内上部分间隙大于针管直径1-3mm,所述阶梯槽间隙大于针帽直径1-2mm。
优选的,所述气缸组包括第一气缸、第一活塞杆、第二气缸和第二活塞杆,所述第一气缸通过第二转轴与所述第三电机固定连接,所述第一活塞杆与所述第二气缸连接。
优选的,所述被动齿轮与第二固定杆一端铰接,所述第二固定杆另一端与所述躺板后侧固定。
优选的,所述导套内设有盲孔,所述导杆通过所述盲孔与所述导套滑动连接,所述盲孔内还安装有第一弹簧,所述第一弹簧一端与盲孔底部接触,另一端与所述导杆接触。
优选的,所述挡板和所述踏板上还安装有传感器,所述第三连杆上安装有视觉传感器,所述躺板后侧还安装有控制器,所述控制器处理所有信号。
本发明的有益效果:通过换药机构实现换药的半自动化,提高了医护人员的工作效率;通过上药机构实现了自动化注射,降低了医护人员的劳动强度;智能化的控制,保证一个医护人员可控制多台设备同时工作,大大提高医疗效率;半遮蔽式结构,更注重患者的隐私。
附图说明
图1是本发明的示意图。
图2是本发明正视图。
图3是本发明左视图。
图4是本发明打开状态正视图。
图5是本发明打开状态后视图。
图6是本发明换药机构示意图。
图7是本发明曲柄滑块机构剖视图。
图8是本发明凸轮机构示意图。
图9是本发明换药机构剖视图。
图10是本发明注射机构示意图。
图11是本发明上药机构示意图。
图12是本发明上药机构局部剖视图。
图13是本发明注射器示意图。
图中:躺板101、第一滑槽102、挡板103、滑板104、踏板105、第一通槽106、控制器107、平板201、第二通槽202、第一连杆203、转柱204、第一电机205、固定套管206、装针盒301、第一固定杆302、第二滑槽303、第三滑槽304、挡片305、阶梯槽306、转盘401、固定槽402、弹性片403、第三通槽404、顶杆405、第二电机501、主动齿轮502、第一转轴503、凸轮504、固定套505、被动齿轮601、第二固定杆602、销轴701、延伸杆702、导套703、导杆704、滑块705、盲孔706、第一弹簧707、第一气缸801、第二转轴802、第三电机803、第一活塞杆804、第二气缸805、第二活塞杆806,固定块807、第一凹槽901、第三气缸902、第三活塞杆903、第二连杆904、第三固定杆905、第一卡块906、第一卡槽907、第四滑槽908、第二卡块909、第二卡槽910、弹板911、第三卡块912、第二凹槽913、第三凹槽914、第三连杆915、第四活塞杆916、固定板917、第四气缸918、第四卡块919、第二弹簧920、视觉传感器921、管体111、活塞柄112、针管挡113、针头114、针帽115。
具体实施方式
以下将结合附图对本发明各实施例的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部实施例。基于本发明中所述的实施例,本领域普通技术人员在不需要创造性劳动的 前提下所得到的所有其它实施例,都在本发明所保护的范围内。
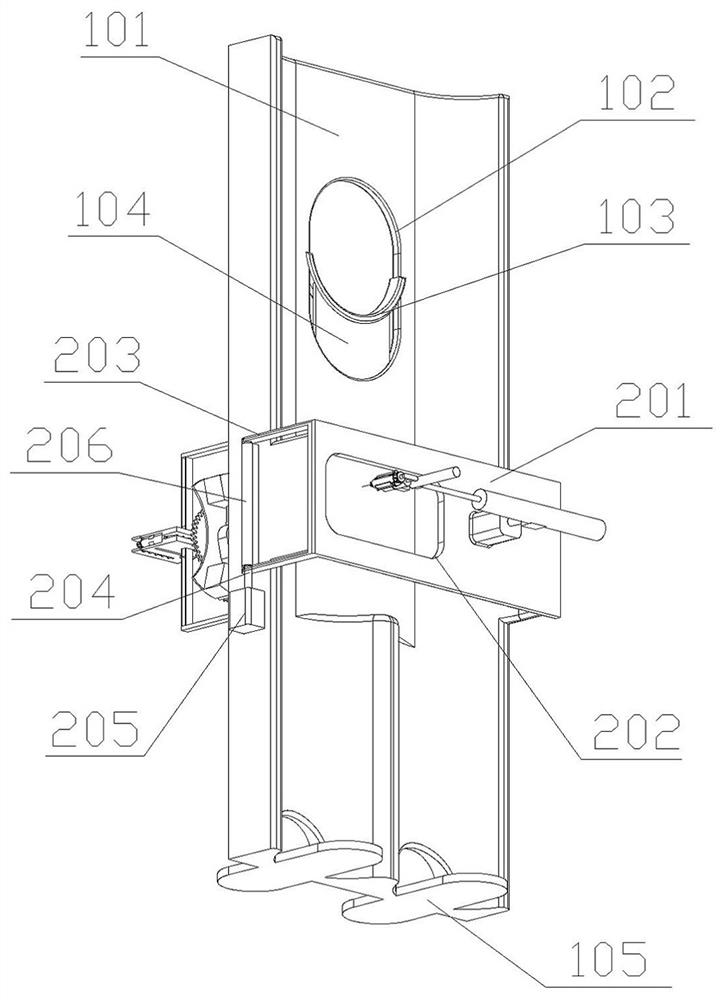
如图1-13所示,一种智能肌肉注射设备,包括躺板101、平板201、注射机构和换药机构,所述平板201上设有第二通槽202,所述平板201一端通过第一连杆203固定有转柱204,所述躺板101一侧固定有第一电机205和固定套管206,所述转柱204与所述固定套管206配合,所述转柱204一端与所述第一电机205连接,所述注射机构包括上药机构、气缸组,所述气缸组通过固定块807与上药机构连接,所述气缸组通过第三电机803与所述平板201连接,所述换药机构包括装针盒301、齿轮机构、凸轮机构、曲柄滑块机构和转盘401,所述装针盒301与第一固定杆302一端铰接,所述第一固定杆302另一端与所述躺板101后侧固定连接,所述装针盒301上设有第二滑槽303和第三滑槽304,所述曲柄滑块机构包括销轴701、延伸杆702、导套703、导杆704和滑块705,所述滑块705与所述第三滑槽304配合,所述滑块705与所述导杆704铰接,所述导杆704与所述导套703配合,所述导套703与延伸杆702铰接,所述齿轮机构包括主动齿轮502和被动齿轮601,所述延伸杆702通过所述销轴701与所述被动齿轮601偏心连接,所述被动齿轮601与所述主动齿轮502配合,所述主动齿轮502通过第一转轴503与第二电机501连接,所述第二电机501与所述躺板101后侧固定连接,所述第一转轴503上还固定有所述转盘401,所述转盘401上设有固定槽402、弹性片403和第三通槽404,所述凸轮机构包括凸轮504和顶杆405,所述凸轮504通过固定套505与所述第二电机501固定连接,所述顶杆405与所述第三通槽404配合,所述顶杆405顶端与所述凸轮504配合。
所述躺板101上部分设有第一滑槽102、挡板103和滑板104,所述挡板103通过所述滑板104与所述第一滑槽102滑动连接,所述躺板101底部还设有踏板105和第一通槽106。
所述上药机构包括第三气缸902、第四气缸918、弹板911和固定板917,所述第三气缸902和所述第四气缸918都与所述固定块807连接,所述第三气缸902和所述第四气缸918还与所述固定板917连接,所述固定板917上端固定有第二卡块909,所述第二卡块909上设有第二卡槽910和第一凹槽901,所述固定板917下端固定有第三卡块912,所述第三卡块912上设有第二凹槽913,所述第三气缸902上安装有第三活塞杆903,所述第三活塞杆903上固定有第二连杆904,所述第二连杆904通过第三固定杆905与第一卡块906连接,所述第一卡块906上设有第一卡槽907,所述第四气缸918上安装有第四活塞杆916,所述第四活塞杆916上固定有第三连杆915,所述第三连杆915上设有第三凹槽914,所述固定板917内侧安装有所述弹板911,所述弹板911两端设有第四滑槽908,所述固定板917内侧两端还设有第四卡块919,所述第四卡块919与所述第四滑槽908配合,所述弹板911之间还固定安装有第二弹簧920。
注射器包括管体111、活塞柄112、针管挡113、针头114和针帽115。
所述注射器与所述上药机构配合,所述活塞柄112与所述第一卡槽907配合,所述活塞柄112与所述第二卡槽910配合,所述管体111与所述弹板911配合,所述针头114与所述第三凹槽914配合,所述针帽115与所述第四凹槽配合。
所述装针盒301内设有阶梯槽306,所述装针盒301端部设有挡片305,所述第二滑槽303与所述活塞柄112配合,所述装针盒301内上部分间隙大于针管直径1-3mm,所述阶梯槽306间隙大于针帽115直径1-2mm。
所述气缸组包括第一气缸801、第一活塞杆804、第二气缸805和第二活塞杆806,所述第一气缸801通过第二转轴802与所述第三电机803固定连接,所述第一活塞杆804与所述第二气缸805连接。
所述被动齿轮601与第二固定杆602一端铰接,所述第二固定杆602另一端与所述躺板101后侧固定。
所述导套703内设有盲孔706,所述导杆704通过所述盲孔706与所述导套703滑动连接,所述盲孔706内还安装有第一弹簧707,所述第一弹簧707一端与盲孔706底部接触,另一端与所述导杆704接触。
所述挡板103和所述踏板105上还安装有传感器,所述第三连杆915上安装有视觉传感921,所述躺板101后侧还安装有控制器107,所述控制器107处理所有信号。
具体工作过程:装置与地面可有一定的倾斜,当有患者需要进行肌肉注射时,初始状态平板为打开状态,如图5所示,医护人员只需要将药瓶放置在固定槽中,然后第二电机启动带动转盘顺时针旋转90°,此时固定槽位于上药机构的正下方,在转盘转动的同时,主动齿轮带动被动齿轮旋转,两齿轮齿数比2:1,主动齿轮旋转90°,被动齿轮旋转180°,被动齿轮上安装的曲柄滑块机构由最短行程向最长行程运动,由于此次行程较短,导杆通过滑块将装针盒中注射器推出到上药机构中压缩第一弹簧,此时第二电机停转,第四气缸启动,通过第三连杆将针帽推出,然后第四气缸复位,第二气缸启动,带动上药机构向下运动,当针头插入药瓶后,第二气缸停止,第三气缸启动,通过第一卡块带动活塞柄运动,将药水吸入注射器中,然后第二气缸复位,此时第二电机再次转动90°,空的药瓶在随转盘转动过程中,顶杆在沿凸轮面运动的过程中,从最低点运动到最高点,进而将孔药瓶从固定槽中顶出,转盘上弹性片是具有弹性的,此时上药过程完成。
注射过程,病人在上药过程完成后,自己脱下裤子露出臀部,双脚站在踏板上,头部与挡板接触,随着不同身高的患者,挡板位置可随滑板移动,当患者与挡板和踏板都接触后,挡板与踏板上的传感器接收到信号,第一电机的电路通过传感器的信号控制的,此时第一电机启动,带动平板转动处于闭合状态,此时第一气缸启动回缩,此时第三连杆上视觉传感器通过平板上第二通槽检测到患者的最佳注射位置,并将信号传入控制器,控制器进一步控制第一气缸和第三电机的运动来讲上药机构运动到最佳注射位置上方,再控制第二气缸的运动,将针头扎入患者臀部,继续控制第三气缸的运动,推动注射器活塞柄将药水注入患者体内,完成注射后,第二气缸复位,然后第三电机和第一气缸也复位,平板打开,患者离开躺板即可,然后医护人员取出注射完的注射器,平板处于打开状态,如要继续注射,只需重复上述动作即可。
相比较现在的全人工注射,本发明可实现智能化,可单人同时控制多台设备共同工作,有效的解决了现存的医患比例不协调的问题,同时半封闭式躺板,能更好的保护患者的隐私。
- 一种智能肌肉注射设备
- 一种智能化多功能肌肉注射专用椅