复杂构型件缺陷光纤声检测系统及其检测和成像方法
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及一种构型件超声检测系统及其检测和成像方法。
背景技术
对于凹面、凸面、凹/凸面等三维复杂构件检测,通常使用超声传感器进行声波传输检测,而传统的刚性超声探头无法直接与试件表面相匹配,需通过水耦合或楔块耦合方式进行声波接收,由于耦合剂与试件声阻抗存在差异,声场能量在耦合剂与试件界面间传输时有损失,进而影响探头灵敏度,导致缺陷定位不准确,采用光纤光栅进行声波检测避免了上述缺点。
发明内容
本发明提出一种可用于复杂构型件检测和成像的检测系统和方法。
本发明复杂构型件缺陷光纤声检测系统包括超声换能器阵列、光纤传感信号检测解调系统和计算机成像系统组成;
其中,超声换能器阵列制作为扇形相控阵;
光纤传感信号检测解调系统包括光源、波分复用器、光纤激光传感器阵列、非平衡Michelson光纤干涉仪、光电探测器;其中非平衡Michelson光纤干涉仪采用2×2耦合器、3×3耦合器和法拉第旋转镜构成;光纤激光传感器阵列由串联的4个DFB激光器组成,4个DFB激光器共用同行一个光路,4个DFB激光器排列呈正方形。
采用上述复杂构型件缺陷光纤声检测系统的检测和成像方法:
一、超声换能器阵列与光纤传感信号检测解调系统中的光纤激光传感器阵列分别位于被检测复杂构型件两侧;
二、超声换能器阵列扫描,并进行光纤传感器调制解调信号转换;
三、成像,从而检测出复杂构型件缺陷;
其中,超声换能器阵列扫描过程中超声换能器阵列与复杂构型件的距离始终保持等距。
本发明方法每次检测范围内构型件的厚度要求相等。
由于在三维定位中,非矢量传感器进行3点定位会出现镜面效应,导致解为对称两点,所以至少为4阵元才能准确定位,因此本发明采用4阵元(DFB激光器)进行检测和后续的算法分析。
本发明通过超声相控阵发射阵扇形扫描脉冲,激励超声换能器阵列阵元探头发射探测声波,并触发超声相控阵成像算法启动工作。发射的脉冲声波经过被检测复杂构型件到达光纤激光超声传感器,改变光纤激光波长,通过非平衡干涉仪将波长信号转换成相位信息,计算出声场信息,并提供给超声相控成像装置,进行实时球壳成像。
本发明声速的测量误差在3米以内;最大误差在+/-4m/s范围内;可分辨5mm×1mm×5mm裂缝,并能检测Φ1mm×5mm平底孔;系统成像空间分辨率为<2mm,具有计算成像速度快等优点。
本发明方法无需使用耦合剂,不仅检测系统设备简单,操作简单,而且检测精度高、灵敏度高,缺陷定位准确。
附图说明
图1为光纤传感信号检测解调系统的解调光路图;
图2为3×3耦合器解调算法图;
图3为采集解调程序流程图;
图4为微软基础类库交互界面;
图5是等声程聚焦扇扫示意图;
图6是扇形扫描延时计算流程图;
图7是实施例1扇形扫描聚焦延时曲线图;
图8是基于A扫描信号实现B扫视图成像流程图;
图9是第64条扫描线延时调节采样点个数图;
图10是一条扫描线下不同阵元的A扫信号接收回波响应数据图;
图11是一条扫描线下不同阵元的A扫信号接收数据添加延时结果图;
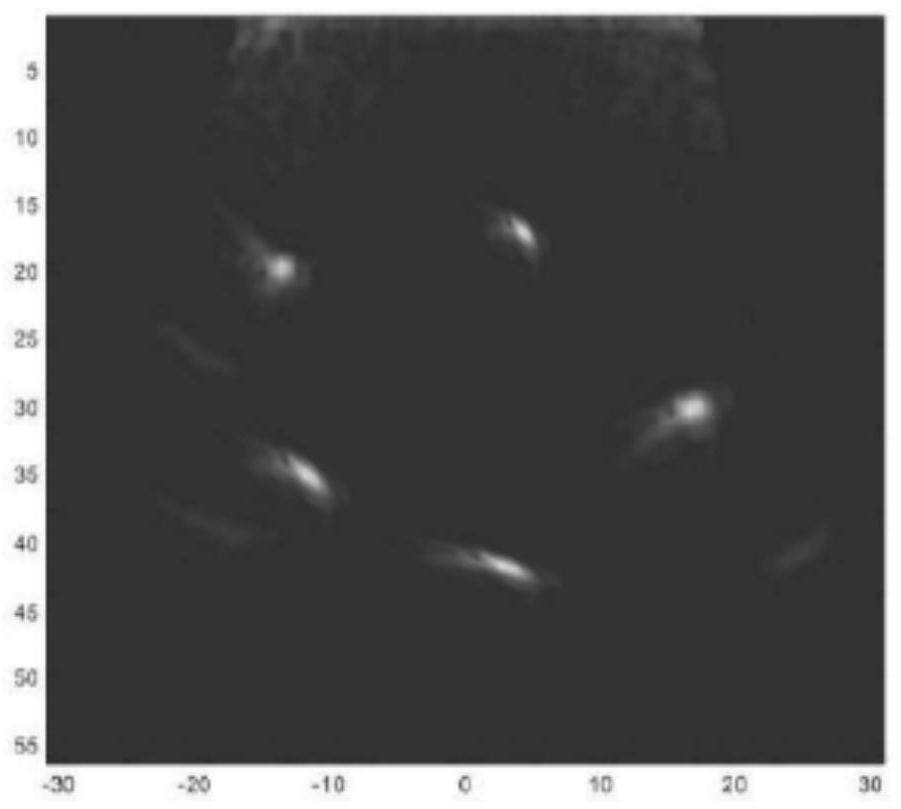
图12是基于接收数据实现的图像;
图13是具体实施方式八中坐标原点示意图;
图14是B扫数据到扇扫图像坐标变换流程图;
图15为实施例2中未插值处理图像;
图16为实施例2中采用最邻近插值处理得到的图像;
图17为实施例2中采用双线性插值处理得到的图像;
图18为实施例2中采用双三次插值处理得到的图像;
图19为实施例2中采用三次样条插值处理得到的图像;
图20为实施例2中采用三次样条插值处理后再经形态学填充得到的图像;
图21为实施例2中半球壳试验样件曲线放大观察图;
图22是实施例2中半球壳试验样件5mm×1mm×5mm裂缝检测结果图;
图23是实施例2中半球壳试验样件5mm×2mm×5mm裂缝检测结果图;
图24是实施例2中直径2mm深度3mm平底孔检测结果图;
图25是实施例2中直径2mm深度5mm平底孔检测结果图;
图26是实施例2中有机玻璃板相邻槽体成像检测结果图。
具体实施方式
本发明技术方案不局限于以下所列举具体实施方式,还包括各具体实施方式间的任意组合。
具体实施方式一:本实施方式复杂构型件缺陷光纤声检测系统,该系统包括超声换能器阵列、光纤传感信号检测解调系统和计算机成像系统组成;其特征在于:
超声换能器阵列制作为扇形相控阵;
光纤传感信号检测解调系统包括光源、波分复用器、光纤激光传感器阵列、非平衡Michelson光纤干涉仪、光电探测器;其中非平衡Michelson光纤干涉仪采用2×2耦合器、3×3耦合器和法拉第旋转镜构成;光纤激光传感器阵列由串联的4个DFB激光器组成,4个DFB激光器共用同行一个光路,4个DFB激光器排列呈正方形。
本实施方式泵浦激光器通过波分复用器进入4个DFB激光器(分布式反馈激光器)。超声相控阵列在被检测复杂构型件内部发出脉冲,声音通过被检测复杂构型件后,声束扩散先后到达四个DFB激光器,接收到超声信号后,激光的谐振腔会发生变化,导致输出的激光器波长发生变化,然后反射回来通过迈克尔逊干涉仪,将波长变化转换成相位变化,通过监测相位变化,检测声波在被检测复杂构型件的传播特性,最后通过B扫描成像,实现被检测复杂构型件的检测。
根据光纤光栅的反射特性,光纤光栅可以作为理想的窄谱反射面来形成光纤激光器的纤内谐振腔;在一段掺杂稀土元素的光纤两端写入光纤光栅作为反射端面就可形成π相移激光谐振腔。在泵浦激光器的泵浦下形成光纤光栅激光器,通过选择合适的光栅和谐振腔长,激光器可稳定振荡发射单纵模激光。采用相移光纤光栅传感器可提高灵敏度,其线宽小于2kHz,精度高。
光纤光栅激光器(DFB激光器)的运行波长为:
λ
其中:n
干涉光束偏振态在干涉仪中随机涨落,将造成信号衰落现象,为消除偏振衰落的影响,本实施方式采用Michelson干涉仪结构(如图1所示),在980nm泵浦光源的作用下,DFB激光器出射的激光通过980/1550nm光纤波分复用器传输至由2×2耦合器、3×3耦合器和法拉第旋转镜构成的非平衡Michelson光纤干涉仪,在干涉仪中偏振主轴被法拉第旋转器旋转45°,当反射镜反射入射光束时,法拉第旋转器把返回光束旋转45°,与入射光束发声正交。由于输入光束的偏振态和三个输出干涉信号的偏振态相比较没有发生变化,因而消除了偏振衰落。三路信号被光电探测器接收,将光信号转换成电信号,再进入A/D采集卡进行解调处理。
3×3耦合器的解调算法流程如图2所示。图中A
将3路输出信号I
通过微分器,并交叉相乘得到:
将a(e-f)、b(f-d)、c(d-e)相加,就得到:
在实际环境中,光源强度波动变化会使I
经积分和滤波处理,可消除慢变化ψ(t),得到与声压成正比的相位信息
由于经过泵浦光源经过在掺饵钇光纤上刻写的π相移激光器和WDM后有效功率降低约30dB,同时考虑到定位处理时多支光纤激光器将进行串联所导致每路分光降低,所以选择高抽运功率蝶形激光器,参数如表1所示。
表1
为避免光纤干涉仪中法兰盘连接损耗影响,光纤干涉仪中全部使用熔接方式连接,并对闲置端口做烧球处理,避免可见光进入光路对干涉信号造成影响。根据采样声波频率范围(1k~2M)与奈奎斯特采样定律,选用200M光电探测器与50M数据采集卡。
超声换能器阵列由若干个独立的阵元按照一定的形状和尺寸组合而成,其中每个阵元都有自己独立的发射和接收电路,系统分别控制各阵元发射信号的相位(或接收信号的时延)、波形和幅度,使得各阵元发射的声束到达预设焦点或者接收点时以相同的相位叠加,从而使声束实现聚焦、偏转、扫描等效果。相控阵换能器各阵元的激励时序是两端阵元先激励,逐渐向中间阵元加大延迟,使得合成的波阵面指向一个曲率中心,即相控聚焦。超声换能器阵列各阵元的激励时序是等间隔增加发射延迟,使得合成波阵面具有一个指向角,就形成了发射声束相控偏转效果。超声换能器阵列接收到回波信号后,利用软件系统对信号进行成像等处理。
具体实施方式二:本实施方式与具体实施方式一的不同点是:DFB激光器的长度为5cm。其它步骤及参数与实施方式一相同。
为便于实现单纵模激光振荡及有利于封装,本实施方式采用长度为5cm的分布式反馈激光器(DFB)。由式(A1)可知,掺铒光纤芯区有效折射率的变化或光栅周期的变化都将导致DFB激光器运行波长的变化。当DFB激光器受到外界声压作用时,声压产生的应变将改变光纤的有效折射率和光栅的周期,此时,DFB激光器运行波长的变化量可由下式确定:
式中P
在均匀加速度信号压力作用下
式中E、υ为被检测复杂构型件材料的杨氏模量和泊松比(石英晶体的杨氏模量和泊松比分别取值7.2×10
将式(A 3)代入式(A2)化简得
其中,光弹系数P
激光工作波长为1550nm时,使用(A5)式计算得出均匀加速度信号压力作用下声压引起的波长位移为-4.4×10
具体实施方式三:本实施方式与具体实施方式一或二的不同点是:由DFB激光器排列的正方形边长为8~20cm。其它步骤及参数与实施方式一或二相同。
声波在介质中传播时会有衰减现象,传播过程中由于波阵面的扩散,引起能量空间扩散,以至波幅度随距离增减而衰减,这种衰减称为几何衰减。由于介质中粒子的散射作用,使得原来传播方向的声波能量减少,致使波振幅随传播距离增加有明显衰减。声波在介质的损失包括粘滞力、热传导及松弛过程所致的耗散。热传导耗散是由于声波在传播过程中,密度增大处因压缩而升温,密度变低处因膨胀而降温,由于介质的热传导,把一部分波动能量变成了分子的能量的变化,是由微观机制所造成的,界面中的损失除了反射、投射损失外,还包括介质中的孔缝或介质中的悬浮颗粒所造成的散射。衰减函数如下两个公式所示:
粘滞性介质位移波函数式中ξ是声波在介质中的位移,ξ
热传导吸收公式中α
具体实施方式四:本实施方式采用上述复杂构型件缺陷光纤声检测系统的检测和成像方法:
一、超声换能器阵列与光纤传感信号检测解调系统中的光纤激光传感器阵列分别位于被检测复杂构型件两侧;
二、超声换能器阵列扫描,并进行光纤传感器调制解调信号转换;
三、成像,从而检测出复杂构型件缺陷;
其中,超声换能器阵列扫描过程中超声换能器阵列与复杂构型件的距离始终保持等距。
本实施方式采用粒子群算法进行定位处理。
C++运算速度快,API函数较多,支持采集卡的二次开发,并且根据采集卡DLL版本限制,本实施方式选择使用VS2010进行解调系统设计,调用动态链接库(DLL)创建微软基础类库(MFC),采用DoDataExchange变量函数、OnInitDialog初始函数、OnSysCommand系统指令响应函数、OnPaint绘图消息响应函数等构建采集解调系统,采集解调程序流程如图3所示。
本实施方式采用微软基础类库框架设计人机交互窗口,如图4所示,其中白色线条为频谱分析界面,横轴坐标为频率,纵轴坐标为相位变化幅值单位为rad,蓝紫黄三条线为3×3解调系统3路输出信号,橙色线为解调后的相位图,并与声信号成正比,从而得到声信号波形。此系统可自由调节时间轴、频谱轴、纵坐标幅度,并可在高通滤波器和低通滤波器中更改参数滤除噪声,得到较完整的声信号波形。
本实施方式将光纤激光传感阵列检测到的波长变化经非平衡光纤干涉仪转化为相位的变化,再采用高分辨率的相位检测技术还原出光纤激光传感阵列检测到的极其微小的波长变化。
在泵浦光源的作用下,分布式反馈激光器出射的激光通过光纤波分复用器传输至非平衡Michelson光纤干涉仪,之后光纤干涉仪输出的光信号被光电探测器转换成电信号后经信号检测电路输出正比于加速度信号大小的电信号。
超声换能器阵列进行声束聚焦时,通过延时设置调节声束的偏转实现声速干涉和焦点的位置的改变。对线性阵列换能器两端阵元先进行激励,两端到中心的阵元依据一定的聚焦法则依次进行延时激励,使得各个阵元发射信号的声束到达某点时具有相同的相位,此时各声束的合成波阵面有一个曲率中心,实现相控聚焦。
对于线性阵列换能器,以阵列中心为原点,第n个阵元到聚焦点的声程为:
第n个阵元发射的声束与阵列中心到焦点距离的声程差为:
Δs=s-F (C2)
第n个阵元相对于第一个发射信号的阵元需要添加的需要添加的的延迟时间为:
根据式(C3)计算所得的延时依次对各阵元进行激发,波束相干叠加后得到对z轴正方向上的某点的聚焦效果。
在声束偏转的基础上,实现相控阵的特殊扫描检测,需要配合声束的聚焦,以实现多角度下声束偏转聚焦效果的扇形扫描,获得清晰良好的成像效果。
对于线性阵列,以换能器阵列中心为原点,当聚焦点在与换能器阵元垂直法线夹角为θ且到原点的距离为F处时,第n个阵元发射信号到聚焦点处的声程为:
第n个阵元发射的声束与阵列中心到焦点距离的声程差为:
Δs=s
式中Smax为各阵元到达聚焦点的最大声程。
第n个阵元相对于第一个发射信号的阵元需要添加的延迟时间为:
根据式(C6)计算所得的延时依次对各阵元进行激发,波束相干叠加后得到对检测区域任意某点的聚焦效果。
当焦距F趋向于无穷大时,满足下式:
即
扇形扫描的延时计算及实现:超声换能器阵列检测时通过声束扫描从而对待测件某一区域进行扫描成像,其中扇形扫描是通过动态控制换能器阵元发射接收信号的激发时间,来自由控制动态实现不同角度声束的偏转和聚焦点位置的变化,实现超声扫描图像。等声程聚焦和等深度聚焦是超声相控阵扇形扫描聚焦的两种主要形式。本实施方式采用等声程聚焦方式,从换能器发出的所有声束到达聚焦点所经过的声程是一个恒定值。
基于扇形扫描聚焦延时的原理及相关计算过程,延迟时间主要与超声换能器基本参数及偏转聚焦设置参数有关。对于同一参数的换能器而言,其延迟时间主要由偏转角度范围和聚焦深度决定。以线性阵列换能器为研究对象,对于扇形扫描两种聚焦形式的聚焦点设置不同,相应的延时计算会有区别。本实施方式等声程聚焦,以中心声束垂直入射与界面交点处为坐标原点,建立坐标系,换能器位于x轴上,中心声束垂直入射方向为z轴,中心阵元的坐标记为(0,0,0),各个阵元的坐标记为(x
x
y
z
其中F为聚焦半径。
计算声程为:
求解最大声程与各声程的差即为延时所需要的声程差,获得等声程下各偏转角度发射声束时各个阵元的延迟时间。满足下式:
式中Δs为第n个阵元发射的声束与阵列中心到焦点距离的声程差。
对于扇形扫描的聚焦延时计算主要涉及到声束的偏转聚焦,在做出基本参数定义后,将不同偏转角下各阵元坐标和聚焦点坐标等代入,利用数值解算方法,循环计算等声程聚焦扇形扫描各偏转角度序列下的延迟时间。具体算法流程如下:
(1)基本参数的设置:换能器基本参数的设置(阵元数目N、中心频率、阵元间距、阵元宽度等),扫描基本参数的设置(声速、偏转角度范围、扫描线条数、偏转角度步进等),以及其他相关参数的设置。
(2)信号发射结构的定义:主要包括发射波形、孔径设置、原点、角度等。
(3)计算第i个阵元的坐标位置,计算当聚焦点确定时第i个阵元到焦点时的声程,循环计算获得所有阵元的声程,判断选择最大声程,循环计算各阵元声程与最大声程的差值。
(4)判断i 判断偏转角度小于角度范围设置,执行步骤(3)(4),获得所有角度扫描线下的所有阵元的延时值;程序结束。 超声相控阵成像是将接收的回波信号以图像的方式显示,被检测件的内部性状可以被检测人员直观的看到。对发射信号进行延时发射,可以接收得到扇形扫描的检测数据,该数据以每个阵元的接收形式为一个数据文件存放在文件中,需要将一系列的向量数据转化为图像数据。 超声无损检测的成像结果根据不同的扫描方式,其显示模式主要包括A、B、C、D、S、P等多种类型。 A扫描图像是将回波信号按时间——幅值曲线一维显示,在相控阵超声检测中,A扫描图像是将换能器发射后接收到的回波信号进行一维显示,观察始波与底波信号之间是否有回波信号,可以判断出被测件内部缺陷情况。横坐标表示回波信号的传播时间,纵坐标表示回波信号的幅值。B扫描图像是将多条A扫描曲线进行调制叠加显示,图像显示换能器移动直线和发射声束轴线所确定的二维截面的检测图像。横坐标表示换能器的位置,纵坐标表示发射声束的传播距离。具有直观性好、真实性强、易于检测等优点。与A扫描总数相应的实时信息,是在某一探头位置获得的,显示为扇形扫描图(即s扫描图像),或B扫描图像。s扫描和B扫描均能产生整体检测图像,由此可快速获取超声波在所有方位检测到的试件形貌或缺陷相关信息。 A扫描图像是一种波形显示,B、C等扫描图像是数字图像显示。扇形扫描的检测区域为扇形,视图位置相当于B扫描视图,显示类型上也属于数字图像显示。数字图像在本质上是一个二维矩阵,大小为m*n的图像矩阵表示为:
其中,f(i,j)表示的是图像在位置(i,j)处的像素值。对被测件进行扇形扫描,最终得到的是一幅超声图像,其本质是图像相对应的一个二维矩阵。在得到了超声扫描区域的回波数据后,以二维矩阵形式进行处理和储存,然后进行数值转化,将数组中元素对应以图像形式进行显示。 具体实施方式五:本实施方式与具体实施方式四的不同点是:步骤二调制解调采用3×3耦合器相位解调法。其它步骤及参数与实施方式四相同。 本实施方式采用3×3耦合器相位解调法可避免干涉型光纤传感器中2×2耦合器产生的π/2相位偏差,并具有可实现无源检测、抗干扰能力强结构简单、性能稳定可靠等优点。 具体实施方式六:本实施方式与具体实施方式四或五的不同点是:步骤三进行扇形扫描延时计算、叠加合成数据矩阵,然后校正扇形扫描图像矩阵进行扇扫图像的坐标转换,之后进行图像处理。其它步骤及参数与实施方式四或五相同。 基于超声相控阵检测成像原理,通过对试块缺陷位置进行检测,并获取所有阵元接收的已经延时发射的超声脉冲信号。对获得的所有阵元的接收信号进行延时、叠加合成处理,达到合成声束偏转和聚焦等相控效果,将处理过的A扫描信号合成B扫数据矩阵,未经过坐标校正的扇扫描图像可以近似认为是B扫视图图像,再对B扫数据矩阵进行坐标转换和校正并以图像的方式显示,实现相控阵扇形扫描成像。 进行相控阵扇形扫描时,接收到的声束信号不是来自于某一个特定的方向,是换能器阵列经过延时发射后所有阵元的A扫描回波信号。相控阵延时发射时,将多个声束信号叠加合成,对某一方向某一特定位置(焦点位置)的信号强度有所增强,尽可能减弱甚至抵消其它不同位置上的信号强度,以达到既定的偏转聚焦效果,同时所有阵元在信号发射后均处于被激活状态,接收到回波信号并存储,获取以阵元数为集合的n列扫描信号。所有阵元同时接收到来自缺陷的回波信号,共有N个回波信号。经过延时调节,将所有阵元接收的信号调节成同相位,然后进行合成输出,得到某一偏转角度即该条扫描线下的一列回波信号。 在实际的接收延时调节中,先计算出各阵元需要添加的延时,回波数据是以采样点的形式存储,添加延时即是对存储数据的添加相应的点数。保证计算出阵列A扫描信号需要截掉或添加的相应的采样点数的精度,是精确的控制每个接收信号的延时的基本要求。 以64个超声换能器阵列阵元为例,超声换能器阵列阵元延时发射后,所有阵元处于同时激活状态下的128个偏转角度下的扫描线接收数据,扫描偏转角度范围为-45°~45°。每条扫描线下每个阵元的声束方向有接收数据采样点p个,对单条扫描线下所有阵元的接收数据进行叠加合成,得到该角度下的A扫数据,对数据进行加权平均归一化等基本处理。在扫描角度范围内有等步进角的扫描线m条,即原图像数据为m*p的矩阵。 扇形扫描方式是超声相控阵检测系统所独有的,以扇形区域为检测所形成的扫查区域,在视图位置上相当于B扫描方式的视图位置,未经过坐标校正的扇扫描图像可以近似认为是B扫视图图像。通过接收到的阵列A扫数据矩阵,实现大小为m*p的B扫描数据矩阵的算法流程如图8所示。 超声信号的发射与接收互为逆过程,由图8可知,当扫描线声束方向相对于z轴方向左偏时,1号阵元接收的回波距离聚焦点的传播距离最短,所需要添加的延时最大;当扫描线声束方向相对于z轴方向右偏时,64号阵元接收的回波距离聚焦点的传播距离最短,所需要添加的延时最大。 对接收到所有阵元的回波信号分别添加延时,其中,距离聚焦点最近的阵元需要添加的延时最大,相应的根据公式计算出延迟的采样点个数,在采样点序列前添加相应的空采样点,同时保证所有阵元接收数据的采样点序列的长度一致,将某个角度下的所有回波信号调剂成同相位。 对于第i个阵元的接收信号需要添加或截断的采样点个数n n 式中,Δt 结合延时计算,根据式(F1)得到计算后单一角度(以第64条扫描线为例)下接收信号需要延时调节采样点的个数,如图9所示。 根据图8给出的流程,输入接收回波数据,如图10所示。设置相关参数(扫描线条数为128条,阵元数目64,起始角度-45°,终止角度45°),对原始接收数据添加延时。以得到的单一角度下合成后的A扫数据,如图11所示。 添加延时后的各个阵元的回波数据具有相近的波形,且信号在幅值波动处基本保持相位一致,能够更好的进行叠加合成。经过相关算法的计算并对信号叠加合成后,得到成像的结果如图12所示。图12中横坐标代表角度序列数,纵坐标代表采样点数(等效为长度坐标),可以直观的得出检测件内部的缺陷性状,但不能真实的反应缺陷所在的位置信息:在采样深度200到400的范围内有2个缺陷。其余位置出现的亮斑是未进行坐标转换而出现的图像“扭曲”。去除靠近换能器位置杂波,图像整体缺陷部分内容显示更加突出。但在该图像中,横纵坐标依然是角度序列和采样序列的对应关系,还不能够显示出缺陷的实际位置信息。 具体实施方式七:本实施方式与具体实施方式四或五或六的不同点是:步骤三图像处理采用三次样条插值和形态学填充。其它步骤及参数与实施方式四或五或六相同。 三次样条插值核函数为:
三次样条插值方法仍然是分别在水平和竖直方向进行计算,是基于邻域的十六个(4×4)采样点的插值方法。在样条插值方法中,阶数过高会增加算法的计算量,还会丧失局部结构的特性,三阶样条插值能够基本满足插值效果的要求,计算量相对较小。 具体实施方式八:本实施方式与具体实施方式四或五或六或七的不同点是:步骤三中校正扇形扫描图像矩阵进行扇扫图像的坐标转换如下:为尽可能在保留原本超声相控阵B扫图像特征前提下舍弃冗余信息,准确提取缺陷特征值,并对缺陷进行量化,通过校正B扫描图像,为实现扇扫图像成像奠定了基础。在进行扇形扫描成像过程中,换能器是以角度序列的顺序依次发射和接收声波,处理过程需要根据延时法则、被检测物中声速和扫查的偏转角度范围等计算图像中的各采样点的实际位置,将非等分辨率的图像数据转换为等分辨率的图像数据,最终实现B扫图像到扇扫图像坐标的转换与校正,使得回波数据在矩形图像上以扇形区域的形式显示具体的扫描区域。 对超声扫描图像的坐标转换,是由原图像矩阵生成目标图像数据矩阵的过程,参考原矩阵像素点的灰度值对目标矩阵像素点进行填充,对原图像矩阵进行一系列的运算处理,得到扇形图像矩阵。对相控阵扇扫图像的坐标转换不仅要确保不能漏掉已有的图像信息,还不能增加新的图像信息。为了使获得的检测图像显示的内容更加直观可见,与缺陷的实际形状、位置等信息保持一致,图像校正的基本思路为: (1)以换能器中心初始位置作为坐标系原点建立坐标系,换能器所在水平向右为x轴正方向,声束传播方向即垂直向下为z轴正方向; (2)载入原图像矩阵的横纵坐标,每个坐标点都对应一个待插值点,对扫描得到的每一个原图像矩阵数据的原坐标点依次执行步骤3和步骤4; (3)对载入的数据根据坐标转换公式及两个矩阵的比例关系计算出对应的极坐标位置,对计算值进行取整运算,确定插值点位于哪些采样点之间以及与采样点之间的坐标距离关系; (4)坐标转换后的图像数据是以直角坐标方式存储,根据插值方法及参考点的像素值,确定插值点的像素值。 (5)对扫描得到的每一个原图像矩阵数据的原坐标点循环依次执行步骤3和步骤4,直到循环结束。如图13所示,换能器中心坐标为(x 计算合成的B扫图中的每一角度序列数据,是由该角度序列下的所有阵元接收到的A扫描信号经由延时后叠加合成的一列信号,角度序列的A扫信号可以视作从换能器左端开始,到换能器右端结束等顺序排列的极坐标序列。在B扫图数据矩阵中,第i列上的第j个数据坐标为(u 换能器阵列第一个阵元的坐标即第一条扫描线的起点坐标为(u
第一条扫描线上第j个采样点的坐标变换过程为:
第i条扫描线上第j个采样点的坐标变换过程为:
调用相关已定义参数;根据网格大小并结合式(G1)、(G2)和(G3)确定所计算的 实施例1 本实施例采用线性阵列64阵元超声换能器阵列,焦距为30mm,声束偏转角度范围为-45°~45°,扫查线条数为128条,声速为5900m/s,计算不同偏转角度下的聚焦扫描延迟时间值,并以曲线形式表示所有阵元在4条不同角度序列下添加的延迟时间,如图7所示。 根据图7可知,当扫描线向左偏,如第一条扫描线,焦点在x轴负半轴时,聚焦位置距离1号阵元最近,则1号阵元所接收的数据需要添加的延时最大,反之则是64号阵元添加的延时最大。阵元接收数据所需要添加的延时即聚焦法则与聚焦点的位置和扫描线的角度相关。 实施例2 制作了直径300mm,厚度30mm的有机玻璃半球壳,在球壳圆形底部制作5mm×1mm×5mm和5mm×2mm×5mm两条裂缝,用来验证对裂纹的检测限;制作了Φ2×5mm平底孔和Φ2×3mm平底孔,用来进行Φ2mm平底孔分层检测限测试;制作了Φ2×5mm平底孔和Φ1×5mm平底孔,用来进行空间分辨率成像测试,通过1mm平底孔证明更高的成像分辨率。 采用本发明方法进行检测,其中采用不同扇扫图像进行插值处理,得到的处理图像如图15~19所示。 图15为未插值处理图像,图16为采用最邻近插值处理得到的图像,图17为采用双线性插值处理得到的图像,图18为采用双三次插值处理得到的图像,图19为采用三次样条插值处理得到的图像。 通过图15~19对比,经过插值处理图像的分辨率有所增强,图像中缺陷边缘轮廓锯齿状棱角一定程度的弱化,缺陷的内部色值的连续性有所提高。最邻近插值法处理过的图像,图像中仍存在明显的棱角,像素点之间仍有像素值的明显差异,说明邻近插值方法的图像处理结果相对较粗糙,双线性插值法处理后的图像相比最邻近插值法的图像有明显的质量提高,但对比双三次插值法处理后的图像仍有不足。双三次插值法处理后的图像,锯齿状棱角和空洞的现象明显有所改善,缺陷处的成像效果有明显的增强。 对双三次插值法处理后的图像进行形态学填充,结果如图20所示(本发明检测成像结果)。 经形态学填充后的扇扫图像,图像质量明显提升,图像内部不连续情况得到有效填充,图像边缘突刺现象得到有效抑制。将形态学填充方法与双三次插值结合对图像进行处理,可以弥补初步处理和坐标变换带来的不足,得到检测缺陷的成像效果也有很大的改善。 试验中需要对被检测复杂构型件材料进行声速测试,明确光信号延时数据(本实施例为t 在球壳内侧通过超声换能器阵发射声脉冲,并将光纤声学解调信号回馈给相控阵成像系统,通过B扫描和三次样条插值处理图像对图像进行处理。5mm×1mm×5mm和5mm×2mm×5mm两条裂缝均有很好的成像效果(如图22和23所示),球壳的外边界也清晰可见;直径1mm和2mm的平底孔均能良好成像效果,球壳的外边界也清晰可见。同时为了分层可见,对直径2mm深度3mm平底孔,也进行了成像,如图24所示;通过该成像与直径2mm深度5mm平底孔成像(如图25所示)比较,证实本发明方法可以清晰区分不同厚度的平底孔成像。 在有机玻璃板刻两个间距2mm的宽度1.5mm,深度3mm的两个槽。在球壳一侧不同位置通过超声换能器阵列发射声脉冲,在另一侧光纤激光传感器阵列耦合的声信号经过声学解调装置解耦,并把接受的超声信号回馈给相控阵成像系统,通过B扫描和三次样条插值处理图像对图像进行处理,得到了两条相邻槽的成像,如图26所示。根据图26可以看出,相邻2mm的槽能清晰分辨出来。对于成像速度,每个侧扫完成成像大约是1.5秒钟,每次围绕球壳移动一度,总共需要360次,成像时间大约9分钟,满足成像空间分辨率优于2mm。 虽然,上文中已经用一般性说明及具体实施方案对本发明作出了描述,若在本发明基础上作出一些修改或改进,而其并不偏离本发明之精神,均属于本发明要求保护的范围。
- 复杂构型件缺陷光纤声检测系统及其检测和成像方法
- 一种应用于复杂多构型微零件自动装配的在线检测系统