一种基于图像处理的双叉臂解魔方机器人
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及一种基于图像处理的双叉臂解魔方机器人,属于智能控制技术领域。
背景技术
魔方是一种常见的智力玩具,依靠单纯的摸索将打乱的魔方快速还原是一项较有难度的行为,因此出现了利用计算机模拟推出最佳还原路径的技术。
目前多数魔方机器人采用气压或液压的方式驱动机器人爪钳的开合、旋转与移动。在魔方复位或打散的路径中旋转过程是主要运动过程,而无论是液压驱动还是气压驱动均需要气管或油管作为动力传递路径,在相对运动表面间不可避免的存在泄漏,因此对装置的密封性有严格要求,同时对于空气与油液的纯度也有很高的要求,气缸或液压缸及配套的过滤装置使得机器人整体结构复杂,维修保养困难。
发明内容
为解决背景技术中存在的问题,本发明提供一种基于图像处理的双叉臂解魔方机器人。
实现上述目的,本发明采取下述技术方案:一种基于图像处理的双叉臂解魔方机器人,包括开关电源、底板、双叉臂机械臂以及识别分析控制系统;
所述识别分析控制系统用于识别收集魔方每个面的颜色信息,计算该魔方的还原方式后,将还原方式信息转化成动作信号发送给两个双叉臂机械臂,所述动作信号为控制两个双叉臂机械臂进行夹紧动作和/或旋转动作的信号,所述夹紧动作用于夹持魔方,所述旋转动作用于驱动夹紧动作转动以对魔方进行重新排布;
所述两个双叉臂机械臂结构相同且反向设置在支架的三角支架部分上,并两个双叉臂机械臂的爪端对应设置,且两个双叉臂机械臂均通过开关电源控制电源的启闭;
所述支架设置在底板上。
与现有技术相比,本发明的有益效果是:
1、本发明采用电驱动,无需过滤装置,且对装置的气密性也无要求,利用成熟的电滑环技术实现机械臂及爪钳的自由转动,整体结构简单且易于日常维护保养,且旋转角度控制精准度高,能够更加稳定、准确地完成魔方的还原。
2、本发明的识别分析控制系统采用图像处理技术对打乱后的魔方排列方式进行快速准确地分组,计算并选择最优路径完成魔方的还原,提高了识别精度,提高了机器人对魔方还原效率及成功率。
3、本发明通过舵机驱动连杆转动,连杆牵引爪钳在滑轨上移动,实现对魔方进行夹紧与放松,适用于多种尺寸魔方的抓取。
附图说明
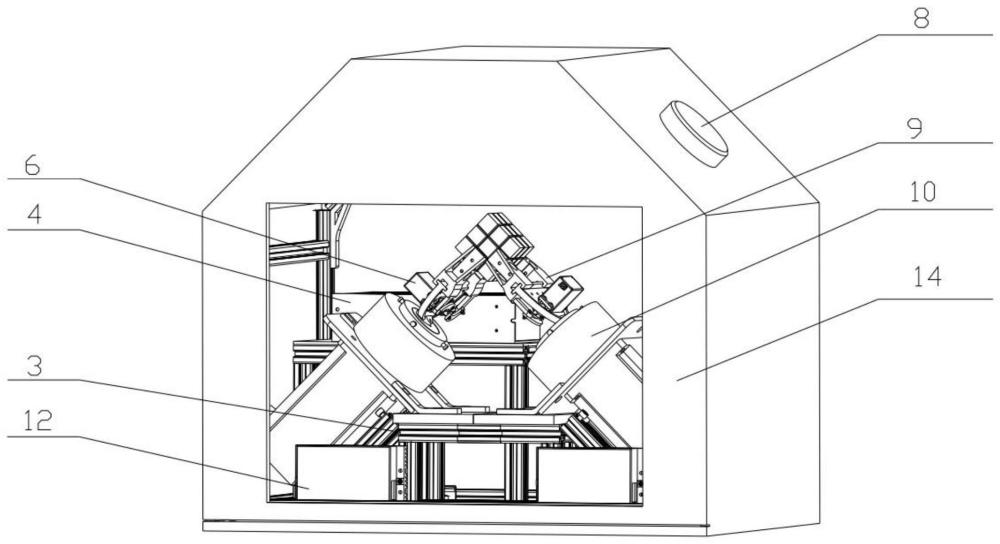
图1是本发明的结构示意图;
图2是图1除壳体外的结构示意图;
图3是图2的后视图;
图4是双叉臂机械臂的结构示意图;
图5是双叉臂机械爪的结构示意图;
图6是图5的后视图;
具体实施方式
下面将结合本发明实施例中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
一种基于图像处理的双叉臂解魔方机器人,包括开关电源4、底板13、双叉臂机械臂以及识别分析控制系统;
所述识别分析控制系统用于识别收集魔方每个面的颜色信息,计算该魔方的还原方式后,将还原方式信息转化成动作信号发送给两个双叉臂机械臂,所述动作信号为控制两个双叉臂机械臂进行夹紧动作和/或旋转动作的信号,所述夹紧动作用于夹持魔方,所述旋转动作用于驱动夹紧动作转动以对魔方进行重新排布;
所述识别分析控制系统包括终端控制器1以及摄像机7;
所述摄像机7镶嵌设置在支架的顶端部分的中心位置,摄像机7用于采集魔方每个面的颜色信息,并将所述颜色信息发送至终端控制器1;摄像机7采用的是CONRING-KL-MN02摄像头。
所述终端控制器1内设有基于卷积神经网络(CNN)的图像处理模块,将接收到的颜色信息与其内已经存储的魔方还原数据集合进行比对,将比对成功的还原方式信息转化成动作信号发送给两个双叉臂机械臂,终端控制器1优选为ArduinoDUE控制器,但不以此为限。
所述图像处理模块用于图像特征提取和选择还原路径;所述图像特征提取在前期利用已经存储的大量的数据模型,通过卷积神经网络对训练集图像进行20次迭代,选取合适的卷积核,以完成图像特征提取以及选择还原路径;针对每组排列方式预先设置最佳的对应复原方案,建立完整的识别分析控制系统,提升了识别准确度以及方案选择速度。
所述终端控制器1还包括魔方还原程序存储模块,可对魔方还原程序进行存储,方便下一次同种排列方式还原程序的使用,通过不断地学习记录实现更快的魔方还原过程。
所述两个双叉臂机械臂结构相同且反向设置在支架的三角支架部分2上,并两个双叉臂机械臂的爪端对应设置,每个双叉臂机械臂的中部均与对应的V型支架部分5连接,两个所述V型支架部分5均与三角支架部分2连接,且两个双叉臂机械臂均通过开关电源4控制电源的启闭;开关电源4设置在电源支撑架部分3上;
每个所述双叉臂机械臂均包括双叉臂机械爪9、电滑环10、步进电机11以及步进电机伺服驱动器12;所述步进电机伺服驱动器12固定在底板13上,通过开关电源4控制电源的启闭,用于接收控制系统发送的动作信号,并控制步进电机11的启闭;所述步进电机11选择的是86步进电机;步进电机11的输出轴通过电滑环10的内环与双叉臂机械爪9的底部连接,具体为:步进电机11的输出轴通过联轴器与光轴的一端连接,所述光轴的另一端通过螺钉与双叉臂机械爪9的底部连接;所述电滑环10的内环固定套设在光轴上,并通过螺钉与双叉臂机械爪9的底部,步进电机11带动电滑环10的内环与双叉臂机械爪9同步转动,所述电滑环10的外环与支架的V型支架部分5连接,电滑环10的外环通过导线与开关电源4连接。
所述双叉臂机械爪9为平行式机械爪。双叉臂机械爪9包括舵机6、爪钳15、连杆16、连接板17以及机械掌18;所述机械掌18的掌根部与电滑环10的内环连接,机械掌18的掌尖部通过滑轨与两个对称设置的爪钳15的爪根部滑动连接,两个爪钳15的行程为10mm-60mm,每个所述爪钳15的爪根部分别与对应的弧形的连杆16的一端通过销轴铰接,每个所述连杆16的另一端与连接板17的对应端分别通过对应的销轴铰接,所述连接板17的中部与舵机6的输出轴固定连接,所述舵机6设置在机械掌18上,并舵机6通过导线与电滑环10的内环相连,舵机6通电后驱动连接板17转动,继而带动连杆16运动,连杆16运动带动两个爪钳15实现相对或相背运动,以达成对魔方的夹紧和松开。开关电源4为舵机6驱动爪钳15对魔方的夹紧与松开以及步进电机11的转动工作提供稳定的电压。
所述支架设置在底板13上,支架包括三角支架部分2、电源支撑架部分3、V型支架部分5以及顶端部分。
实施例2:
本实施例与实施例1的区别在于:
所述机器人的外侧罩设有壳体14,所述壳体14的下端与底板13连接,壳体14对整体装置起到聚光、保护与防尘的作用。
实施例3:
本实施例与实施例2的区别在于:
根据权利要求7所述的一种基于图像处理的双叉臂解魔方机器人,其特征在于:所述壳体14的内顶端镶嵌设有两个对称设置的补光灯8,两个补光灯8的照射角度均为135°,以提供充足的光线,便于摄像机7更加清晰准确的提取魔方色块分布信息。在有壳体14时,摄像机7也可设置在壳体14内顶端的中心位置上。
本发明的工作过程如下:
控制舵机6将待还原的魔方通过双叉臂机械臂夹紧;
在补光灯8的照射作用下,识别分析控制系统中的摄像像机7能够更清晰的获取魔方当前可视面的色块排列方式;
完成扫描后控制双叉臂机械臂转动完成翻转,从而实现魔方初始状态下六个面的色块排列方式的提取,并将其传递到图像处理模块中;
利用前期的学习训练分组结果完成识别与归类,选择最佳还原路径方案;
将还原路径方案转换为控制信号并传输到步进电机伺服驱动器;
步进电机伺服驱动器按照控制信号信息控制步进电机转动方向与旋转角度;
步进电机的转动带动双叉臂机械爪转动实现对魔方的还原。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同条件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种基于双叉臂减震汽车悬架
- 一种二臂二指型解魔方机器人
- 一种二臂二指型解魔方机器人