一种十字滑环清洗方法
文献发布时间:2023-06-19 19:40:14
技术领域
本发明涉及滑环技术领域,具体涉及一种十字滑环清洗方法。
背景技术
中国专利CN107575349A公开了一种风电机组变桨滑环自动清洗装置及清洗流程,清洗装置包括PLC控制模块、直流电机、喷洗系统、注油系统、污渍收集盒,所述PLC控制模块通过继电器、继电器、继电器分别与直流电机、喷洗系统、注油系统接通,所述喷洗系统包括喷洗液储存罐、喷洗泵、喷洗管、喷洗喷头,所述喷洗液为无水酒精,所述注油系统包括润滑油储存罐、注油泵、注油管、注油喷头,所述直流电机通过联轴器与变桨滑环的支架连接。
现有技术中,利用PLC控制模块通过继电器依次控制直流电机、喷洗系统和注油系统,完成变桨滑环的自动清洗工作;但是其方式在清洗过程中,所有十字滑环混合在一起,而有的十字滑环污物面积大,在相同的清洗标准下,大面积污物的十字滑环,会出现清洗不彻底,十字滑轮上会有残留的问题出现;以及清洗机清洗效率太慢,从而在设置的时间内,清洗效果不佳的问题,以及清洗速度过大,从而使得清洗机完成多余的清洗工作,造成资源的浪费的问题。
发明内容
本发明的目的就在于解决十字滑环清洗不彻底的问题,而提出一种十字滑环清洗方法。
本发明的目的可以通过以下技术方案实现:
一种十字滑环清洗方法,包括以下步骤:
步骤1:获取十字滑环在清洗前的重量和污物面积;
步骤2:获取每个十字滑环的重量差值Ghci和污物面积占比系数Xwi,并计算得到十字滑环的分类系数Zw;
步骤3:获取到该十字滑环集合HJj的分类系数Zw,并获取到相应的清洗系数,对十字滑环进行清洗;
其中,步骤3具体包括以下内容:
步骤31:将分类模块得到的分类系数Zw,代入到以分类系数为X轴,清洗系数为Y轴的直角坐标系中,并通过清洗-分类系数曲线,计算得到相应的清洗系数,并标记为Xq;
步骤32:将得到的清洗系数Xq发送至清洗机控制器,使得清洗机按照其清洗系数Xq进行工作。
作为本发明进一步的方案:还包括以下步骤:
步骤4:获取清洗机的清洗参数,并根据清洗参数对十字滑环的清洗质量进行实时监测。
作为本发明进一步的方案:还包括以下步骤:
步骤5:获取到分类模块的污物值Zw和监测模块的清洗液水位值Wq,对清洗机的清洗液情况进行及时分析,并提醒工作人员对其进行及时更换。
作为本发明进一步的方案:步骤2具体包括以下内容:
步骤21:获取到每个十字滑环的重量差值Ghci和污物面积占比系数Xwi,通过公式
步骤22:设置分类系数,并标记为Kj;j=1,2,…,w;且K1<K2<…<Kw;每个分类系数Kj均对应着十字滑环的污物值范围,分别为(W1,W2],(W2,W3],…,(Ww,Ww+1];且W1<W2<…<Ww<Ww+1;
其中,当Zw∈(Ww,Ww+1]时,则该十字滑环的分类系数为Zw。
作为本发明进一步的方案:将相同的分类系数的十字滑环收集在一起,得到十字滑环集合HJj。
作为本发明进一步的方案:步骤4具体包括以下内容:
步骤41:获取到清洗机内的清洗液水位值和清洗液流速,并分别对应标记为Wq和Vq;
步骤42:利用公式
步骤43:将得到的清洗机在线清洗系数Xjz与清洗系数Xq做差值计算,得到清洗差值Cq;
步骤44:将清洗差值Cq与清洗差值阈值进行比较。
作为本发明进一步的方案:若清洗差值Cq大于清洗差值阈值时,生成清洗不合格信号;
若清洗差值Cq小于清洗差值阈值时,生成清洗合格信号。
作为本发明进一步的方案:步骤5具体包括以下内容:
步骤51:获取到清洗液水位值Wq,清洗溶解的十字滑环上污物的报警值,并标记为ZRmax;
步骤52:获取到分类模块的污物值Zw,以及十字滑环集合HJj中十字滑环的个数,相加求和得到十字滑环集合HJj清洗的污物总值Zwz;
步骤3:将集合HJj中十字滑环的污物总值Zwz与清洗溶解的十字滑环上污物的报警值ZRmax进行比较。
作为本发明进一步的方案:当某集合HJj中十字滑环的污物总值Zwz大于清洗溶解的十字滑环上污物的报警值ZRmax时,则将扣除部分的十字滑环,等待下一批次进行清洗处理,同时清洗机发出报警信号,安排工作人员对清洗机内的清洗液进行更换。
本发明的有益效果:
本发明的分类模块,将所有要清洗的十字滑环进行分类处理,其分类的标准是将相近的污物值Zw汇集一起,使得在清洗过程中,可以各个十字滑环脏污程度相差比较小,可以在相同的清洗系统下进行处理,从而提高对十字滑环清洗的效率,避免当十字滑环在清洗过程中,所有十字滑环混合在一起,而有的十字滑环污物面积大,在相同的清洗标准下,大面积污物的十字滑环,会出现清洗不彻底,十字滑轮上会有残留的问题出现;
本发明的监测模块,对十字滑环所对应的清洗机进行实时监测,保证其清洗处于正常工艺范围内,避免清洗机清洗效率太慢,从而在设置的时间内,清洗效果不佳的问题,以及清洗速度过大,从而使得清洗机完成多余的清洗工作,造成资源的浪费;
本发明的提醒模块,对清洗机内的清洗液情况进行分析,保证清洗液对十字滑环的清洗效率,避免清洗液过渡对十字滑环清洗,而达到饱和状态,使得对当下或下批次的十字滑环不能有效的清洗,去除十字滑环表面的污物的现象;
综上,本发明的清洗方法,可以针对十字滑环的情况进行分类清洗处理,以及在清洗过程中,对十字滑环清洗进行监测,从而提高十字滑环的清洗效率和清洗质量。
附图说明
下面结合附图对本发明作进一步的说明。
图1是本发明清洗系统的系统框图;
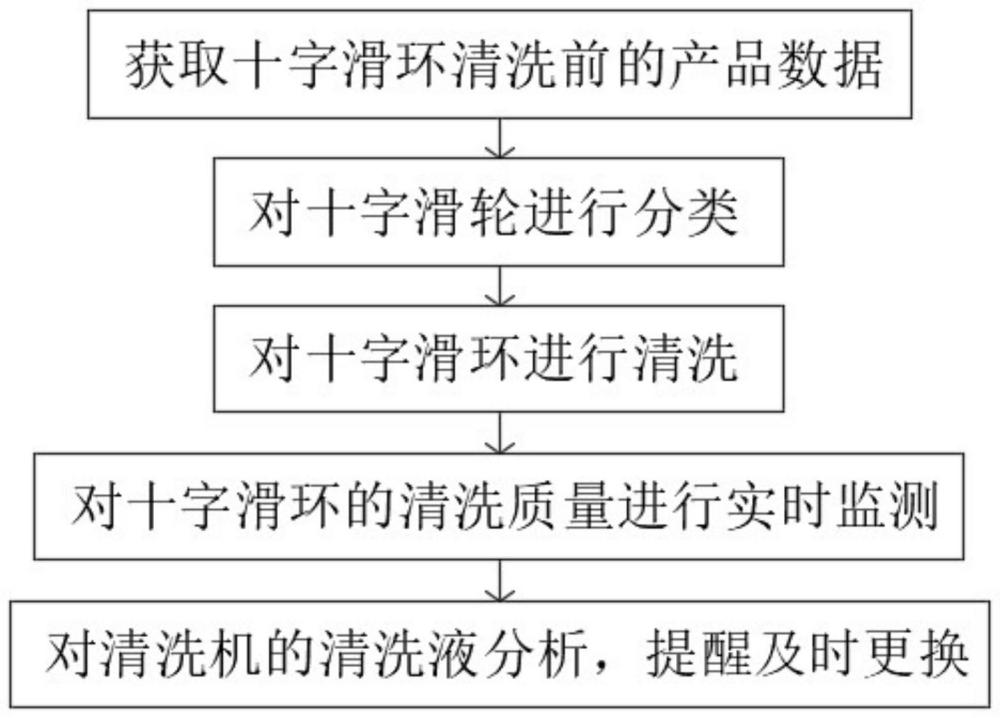
图2是本发明清洗方法的流程框图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例1
请参阅图1所示,本发明为一种十字滑环清洗系统,包括:
采集模块,获取到十字滑环在清洗前的产品数据,该产品数据包括十字滑环的重量,以及污物面积;
该采集模块具体的工作过程如下:
步骤1:对十字滑环进行标号记为i,其中,i=1,2,……,n,n为正整数,然后获取到每个十字滑环在清洗前的重量,并标记为Ghi,以及十字滑环的污物面积,并标记为Shi;
步骤2:获取到该十字滑环标准重量,并标记为Ghb,以及十字滑环的标准面积,并标记为Shb;
其中,十字滑环标准重量Ghb和十字滑环标准面积Shb,为该型号的十字滑环产品工艺预先设计的工艺参数,其可以由技术人员根据工艺要求设置而得到的;
步骤3:利用公式Ghci=|Ghi-Ghb|,计算得到重量差值Ghci,利用公式
分类模块,获取每个十字滑环的重量差值Ghci和污物面积占比系数Xwi,并根据重量差值Ghci和污物面积占比系数Xwi,对十字滑轮进行分类处理;
该分类模块具体的工作过程如下:
步骤1:获取到每个十字滑环的重量差值Ghci和污物面积占比系数Xwi,通过公式
步骤2:设置分类系数,并标记为Kj;j=1,2,…,w;且K1<K2<…<Kw;每个分类系数Kj均对应着十字滑环的污物值范围,分别为(W1,W2],(W2,W3],…,(Ww,Ww+1];且W1<W2<…<Ww<Ww+1;
其中,当Zw∈(Ww,Ww+1]时,则该十字滑环的分类系数为Zw;
步骤3:将相同的分类系数的十字滑环收集在一起,得到十字滑环集合,并标记为HJj;
本发明的分类模块,将所有要清洗的十字滑环进行分类处理,其分类的标准是将相近的污物值Zw汇集一起,使得在清洗过程中,可以各个十字滑环脏污程度相差比较小,可以在相同的清洗系统下进行处理,从而提高对十字滑环清洗的效率,避免当十字滑环在清洗过程中,所有十字滑环混合在一起,而有的十字滑环污物面积大,在相同的清洗标准下,大面积污物的十字滑环,会出现清洗不彻底,十字滑轮上会有残留的问题出现。
清洗模块,获取到该十字滑环集合HJj的分类系数Zw,并获取到相应的清洗系数;
该清洗模块具体的工作过程如下:
步骤1:将分类模块得到的分类系数Zw,代入到以分类系数为X轴,清洗系数为Y轴的直角坐标系中,并通过清洗-分类系数曲线,计算得到相应的清洗系数,并标记为Xq;
步骤2:将得到的清洗系数Xq发送至清洗机控制器,使得清洗机按照其清洗系数Xq进行工作;
监测模块,获取清洗机的清洗参数,并根据清洗参数对十字滑环的清洗质量进行实时监测;
该监测模块具体的工作过程如下:
步骤1:获取到清洗机内的清洗液水位值和清洗液流速,并分别对应标记为Wq和Vq;
步骤2:利用公式
步骤3:将得到的清洗机在线清洗系数Xjz与清洗系数Xq做差值计算,得到清洗差值Cq;
步骤4:将清洗差值Cq与清洗差值阈值进行比较:
若清洗差值Cq大于清洗差值阈值时,表示清洗机清洗参数偏离清洗系数Xq,生成清洗不合格信号;
若清洗差值Cq小于清洗差值阈值时,表示清洗机清洗参数处于清洗系数Xq范围内,生成清洗合格信号;
本发明的监测模块,对十字滑环所对应的清洗机进行实时监测,保证其清洗处于正常工艺范围内,避免清洗机清洗效率太慢,从而在设置的时间内,清洗效果不佳的问题,以及清洗速度过大,从而使得清洗机完成多余的清洗工作,造成资源的浪费;
提醒模块,获取到分类模块的污物值Zw和监测模块的清洗液水位值Wq,对清洗机的清洗液情况进行及时分析,并提醒工作人员对其进行及时更换;
该提醒模块具体的工作过程如下:
步骤1:获取到清洗液水位值Wq,清洗溶解的十字滑环上污物的报警值,并标记为ZRmax;
步骤2:获取到分类模块的污物值Zw,以及十字滑环集合HJj中十字滑环的个数,相加求和得到十字滑环集合HJj清洗的污物总值Zwz;
步骤3:将集合HJj中十字滑环的污物总值Zwz与清洗溶解的十字滑环上污物的报警值ZRmax进行比较:
当某集合HJj中十字滑环的污物总值Zwz大于清洗溶解的十字滑环上污物的报警值ZRmax时,则将扣除部分的十字滑环,等待下一批次进行清洗处理,同时清洗机发出报警信号,安排工作人员对清洗机内的清洗液进行更换;
本发明的提醒模块,对清洗机内的清洗液情况进行分析,保证清洗液对十字滑环的清洗效率,避免清洗液过渡对十字滑环清洗,而达到饱和状态,使得对当下或下批次的十字滑环不能有效的清洗,去除十字滑环表面的污物的现象。
实施例2
请参阅图2所示,基于上述实施例1,一种十字滑环清洗方法,包括以下步骤:
步骤1:获取到十字滑环在清洗前的产品数据,该产品数据包括十字滑环的重量,以及污物面积;
步骤2:获取每个十字滑环的重量差值Ghci和污物面积占比系数Xwi,并根据重量差值Ghci和污物面积占比系数Xwi,对十字滑轮进行分类处理;
步骤3:获取到该十字滑环集合HJj的分类系数Zw,并获取到相应的清洗系数,对十字滑环进行清洗;
步骤4:获取清洗机的清洗参数,并根据清洗参数对十字滑环的清洗质量进行实时监测;
步骤5:获取到分类模块的污物值Zw和监测模块的清洗液水位值Wq,对清洗机的清洗液情况进行及时分析,并提醒工作人员对其进行及时更换。
本发明的工作原理:本发明的分类模块,将所有要清洗的十字滑环进行分类处理,其分类的标准是将相近的污物值Zw汇集一起,使得在清洗过程中,可以各个十字滑环脏污程度相差比较小,可以在相同的清洗系统下进行处理,从而提高对十字滑环清洗的效率,避免当十字滑环在清洗过程中,所有十字滑环混合在一起,而有的十字滑环污物面积大,在相同的清洗标准下,大面积污物的十字滑环,会出现清洗不彻底,十字滑轮上会有残留的问题出现;
本发明的监测模块,对十字滑环所对应的清洗机进行实时监测,保证其清洗处于正常工艺范围内,避免清洗机清洗效率太慢,从而在设置的时间内,清洗效果不佳的问题,以及清洗速度过大,从而使得清洗机完成多余的清洗工作,造成资源的浪费;
本发明的提醒模块,对清洗机内的清洗液情况进行分析,保证清洗液对十字滑环的清洗效率,避免清洗液过渡对十字滑环清洗,而达到饱和状态,使得对当下或下批次的十字滑环不能有效的清洗,去除十字滑环表面的污物的现象。
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 一种器件芯片的清洗夹具、清洗系统及清洗方法
- 一种用于高效清洗脱硝催化剂的再生清洗液及其清洗方法
- 一种清洗机加热方法、清洗机及安装有该清洗机的冰箱
- 一种汽车内饰清洗剂、制备方法及清洗汽车内饰的方法
- 一种粉末冶金十字滑环模具的加工方法
- 一种粉末冶金十字滑环模具的加工方法