一种机械臂液压控制系统
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及液压系统技术领域,尤其涉及一种机械臂液压控制系统。
背景技术
目前国内机械臂的控制,大多采用电比例的负载敏感多路阀,在共用同一个油泵的基础上,可以实现多个机械臂动作部件同时工作,而互不干扰;并且可以对每个机械臂动作部件进行无级调速。然而相比普通的3位6通多路阀,电比例的负载敏感多路阀成本较高,对油液清洁度要求较高,且维修难度较大。
发明内容
本发明的目的在于提供一种机械臂液压控制系统。
本发明采用的技术方案是:
一种机械臂液压控制系统,其包括液压油箱、液压油泵、主溢流阀、3位6通多路阀、回转马达和至少一个变幅油缸;每个回转马达或变幅油缸均通过3位6通多路阀连接液压油泵的出油管,动作马达或变幅油缸回油均通过管路连接回对应的3位6通多路阀,并从3位6通多路阀的T油口连接回液压油箱;液压油泵的出油口通过主溢流阀连接至液压油箱的回油口;其特征在于:还包括若干优先阀,N个优先阀依次串联在一起,并使液压油泵的出油口与第一个优先阀的P油口相连;串联好的每个优先阀分别与一个3位6通多路阀相连。
进一步地,作为一种优选实施方式,本发明还包括液压油箱附件,液压油箱附件包括吸油滤油器和回油滤油器,液压油箱通过吸油滤油器接入液压油泵,回油滤油器设置在液压油箱的回油口,液压回油通过回油滤油器返回液压油箱。
进一步地,作为一种优选实施方式,每个变幅油缸上设置平衡阀,平衡阀防止变幅油缸停止动作时因自重下降。
进一步地,作为一种优选实施方式,3位6通多路阀包括O型3位6通多路阀和Y型3位6通多路阀,回转马达通过O型3位6通多路阀连接液压油泵,每个变幅油缸分别通过对应的Y型3位6通多路阀连接液压油泵。
进一步地,作为一种优选实施方式,优先阀的数量N不少于回转马达和变幅油缸数量总和;
进一步地,作为另一种可行实施方式,最后一个优先阀额外连接一路3位6通多路阀。
进一步地,作为一种优选实施方式,优先阀的数量N不少于回转马达和变幅油缸数量总和减1。
进一步地,作为一种优选实施方式,机械臂包括一个回转马达和N个臂架油缸,优先阀数量为N个。
本发明采用以上技术方案,针对普通3位6通多路阀本身不具备压力补偿,无法做到使机械臂动作部件能够同时工作,而互不干扰;并且无法对每个机械臂动作部件进行无级调速的问题。本发明在普通3位6通多路阀之前串联优先阀可以完全解决上述问题。相比较现下常规使用的电比例的负载敏感多路阀,该发明成本低廉,对液压系统油液清洁度要求低,并且维修简单方便。
附图说明
以下结合附图和具体实施方式对本发明做进一步详细说明;
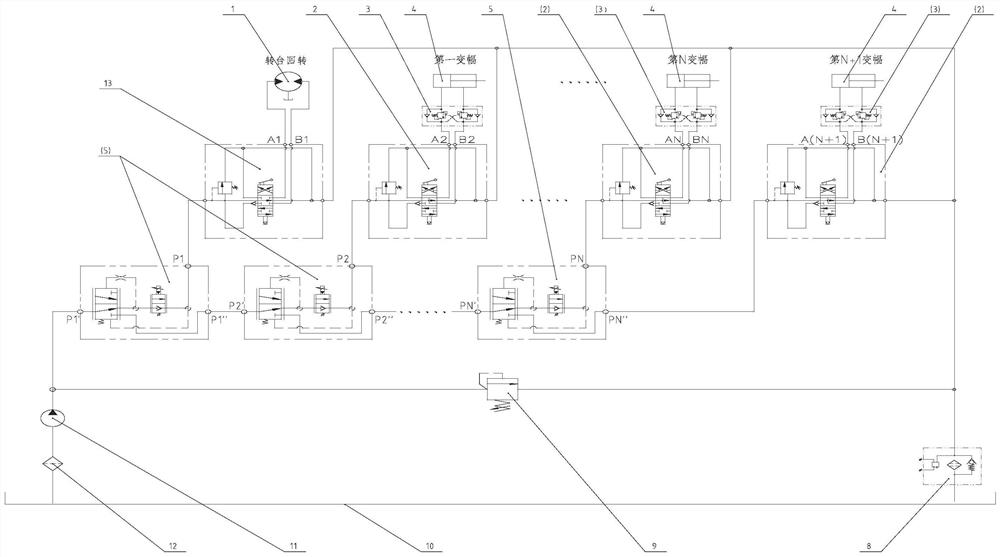
图1为本发明一种机械臂液压控制系统的原理示意图。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图对本申请实施例中的技术方案进行清楚、完整地描述。
本发明公开了一种机械臂液压控制系统,其包括液压油箱10、液压油泵11、主溢流阀9、3位6通多路阀、回转马达1和至少一个变幅油缸4;每个回转马达1或变幅油缸4均通过3位6通多路阀连接液压油泵11的出油管,动作马达或变幅油缸4回油均通过管路连接回对应的3位6通多路阀,并从3位6通多路阀的T油口连接回液压油箱10;液压油泵11的出油口通过主溢流阀9连接至液压油箱10的回油口;其特征在于:还包括若干优先阀,N个优先阀依次串联在一起,并使液压油泵11的出油口与第一个优先阀P1的P油口P1’相连;串联好的每个优先阀分别与一个3位6通多路阀相连。
进一步地,作为一种优选实施方式,本发明还包括液压油箱附件,液压油箱附件包括吸油滤油器12和回油滤油器8,液压油箱10通过吸油滤油器12接入液压油泵11,回油滤油器8设置在液压油箱10的回油口,液压回油通过回油滤油器8返回液压油箱10。
进一步地,作为一种优选实施方式,每个变幅油缸4上设置平衡阀3,平衡阀3防止变幅油缸4停止动作时因自重下降。
进一步地,作为一种优选实施方式,3位6通多路阀包括O型3位6通多路阀和Y型3位6通多路阀,回转马达1通过O型3位6通多路阀连接液压油泵11,每个变幅油缸4分别通过对应的Y型3位6通多路阀连接液压油泵11。
进一步地,作为一种优选实施方式,优先阀的数量N不少于回转马达1和变幅油缸4数量总和;
进一步地,作为另一种可行实施方式,最后一个优先阀额外连接一路3位6通多路阀。
进一步地,作为一种优选实施方式,优先阀的数量N不少于回转马达1和变幅油缸4数量总和减1。
进一步地,作为一种优选实施方式,机械臂包括一个回转马达1和N个臂架油缸,优先阀数量为N个。
具体地,如图1所示,本发明将N个优先阀5串联在一起,并使液压油泵11的出油口与优先阀5的P1油口相连;N个串联好的优先阀5分别与O型3位6通多路阀13或Y型3位6通多路阀2相连;再由O型3位6通多路阀13或Y型3位6通多路阀2连接至回转马达1或变幅油缸4。所有动作马达或油缸回油均通过管路连接回O型3位6通多路阀13或Y型3位6通多路阀2,并从O型3位6通多路阀13或Y型3位6通多路阀2的T油口连接回液压油箱10。
本发明采用以上技术方案,针对普通3位6通多路阀本身不具备压力补偿,无法做到使机械臂动作部件能够同时工作,而互不干扰;并且无法对每个机械臂动作部件进行无级调速的问题。本发明在普通3位6通多路阀之前串联优先阀可以完全解决上述问题。相比较现下常规使用的电比例的负载敏感多路阀,该发明成本低廉,对液压系统油液清洁度要求低,并且维修简单方便。
显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。通常在此处附图中描述和示出的本申请实施例的组件可以以各种不同的配置来布置和设计。因此,本申请的实施例的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
- 一种多自由度液压机械臂的电液控制系统及其控制方法
- 一种机械臂液压控制系统