一种用于架空电缆拉线滑车的无线同步检测装置
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及滑车检测装置,具体为一种用于架空电缆拉线滑车的无线同步监测装置。
背景技术
电力线缆在架设时作业流程复杂,工序繁多,其中至关重要的一道工序就是:线缆在通过塔杆时必须由专业的多轴滑车支撑,才能顺利的通过沿途各塔杆,完成架设并入电网,达到安全施工的目的。一旦滑车出现故障停转,线缆在通过滑车时就会与滑车接触面发生严重摩擦,导致线缆外保护层损坏,如果不能及时发现便会造成巨大的经济损失,严重时还可能发生重大安全事故。目前还没有专业设备用来实时的监测施工现场各滑车的工作状态。
发明内容
本发明旨在解决目前没有用来实时的监测施工现场各滑车的工作状态的设备的技术问题,提供了一种用于架空电缆拉线滑车的无线同步监测装置。
本发明解决其技术问题采用的技术手段是:一种用于架空电缆拉线滑车的无线同步监测装置,包括分别安装在滑车上的滑车传感器单元和安装在塔杆上的中继器;滑车传感器单元包括数个分别安装在每个滑轮支撑轴上的六轴姿态传感器、第一天线和用于发送六轴姿态传感器检测到的滑轮运行数据的第一ZigBee模块,六轴姿态传感器和第一天线均与第一ZigBee模块相连,第一ZigBee模块还连接有第一电源模块和第一键盘及显示模块;中继器包括用于判断并发送滑轮运行数据的微控制器、第二天线和LORA通信模块,微控制器与LORA通信模块相连接,LORA通信模块与第二天线相连接,微控制器通过第二ZigBee模块与第二天线相连,第二ZigBee模块和第一ZigBee模块进行信号传输,微控制器还连接有第二电池模块和第二键盘及显示模块。
若一台滑车上包括五个滑轮,那么每个滑轮的支撑轴上均安装一个六轴姿态传感器,六轴姿态传感器用于检测滑轮的角速度和加速度,五个六轴姿态传感器分别将五个滑轮的角速度和加速度传输给第一ZigBee模块,第一ZigBee模块控制五个六轴姿态传感器实现时钟同步,然后第一ZigBee模块将滑车的五个滑轮的运行数据通过第一天线发送给中继器,中继器的第二ZigBee模块和滑车传感器单元的第一ZigBee模块通过第二天线以及第一天线相连接,第二ZigBee模块将接收到的滑车的五个滑轮的运行数据发送给中继器的微控制器,第二ZigBee模块和第一ZigBee模块之间实现时钟同步,第二ZigBee模块、微控制器以及LORA通信模块之间均保持时钟同步;微控制器根据预先设置的告警逻辑实时比对各个六轴姿态传感器的角速度值和加速度值,如果发现有不同步的情况,即有滑轮出现故障停转现象,微控制器将告警数据通过LORA通信模块发送给设置有LORA接收模块的控制中心,控制中心就能根据告警信号第一时间找到故障位置,实行抢修,最大程度上减少滑轮停转故障对线缆的磨损。当基建现场有多个塔杆时,每个塔杆上均设置有中继器,运行在相邻塔杆之间的滑车上均设置有滑车传感器单元,每个滑车传感器单元将滑轮的运行数据传输至与其自身连接的中继器上,中继器的微控制器将告警数据打包后发送至另一个中继器,起到中继作用,相邻中继器之间依靠二者的LORA通信模块进行数据传输,最终离控制中心最近的中继器将所有所述的用于架空电缆拉线滑车的无线同步监测装置的告警数据发送至控制中心。控制中心对基建现场的所有滑车进行实时监控。具体的,微控制器的控制程序为现有程序,是本领域技术人员根据需要容易想到的。LORA通信模块既能发送告警数据给控制中心,也能接收其他中继器发来的告警信号。中继器通过微控制器能提供时钟同步服务,根据六轴姿态传感器的请求,实时将中继器的心跳时钟同步给六轴姿态传感器。而且为了减少电力消耗,六轴姿态传感器采用间歇工作模式,在不工作的时间段里进入超低功耗运行,运行周期根据心跳时钟与其他六轴姿态传感器保持同步,心跳时钟定期与中继器同步。
优选的, 微控制器还连接有声光报警器。声光报警器尽量安装在靠近地面的高度上,以便工作人员更准确、及时的接收告警信号,而且设置声光报警器,也能更加及时得实现基建现场本地告警。
优先的,第一ZigBee模块与第一电源模块之间还连接有开关稳压器稳压模块,这是为了保持滑车传感器单元的电压稳定性。
优选的,第一键盘及显示模块包括键盘组件和信号指示灯;第二键盘及显示模块包括键盘组件、信号指示灯和USB接口。通过各自的键盘组件能够对中继器和滑车传感器单元进行初步参数设定;信号指示灯用于指示中继器和滑车传感器单元的运行状态,比如中继器和滑车传感器单元处于待机时,指示灯亮,当中继器和滑车传感器单元无电时,指示灯灭;第二键盘及显示模块的USB接口用于连接PC端,对微控制器进行程序编写、设定。
本发明的有益效果是:基于ZigBee技术实现了传感器、中继器以及控制中心的无线数据传输,通过本装置能实时检测到基建现场不同滑车的各滑轮是否出现故障停转现象,而且控制中心能够及时得到准确的告警信号,进行及时抢修,最大程度上减少了滑轮停转故障对线缆的磨损,进一步保护了线缆,从而避免了巨大的经济损失以及重大安全事故;保障了基建中心拉线作业的正常平稳进行,保障了工程进度。
附图说明
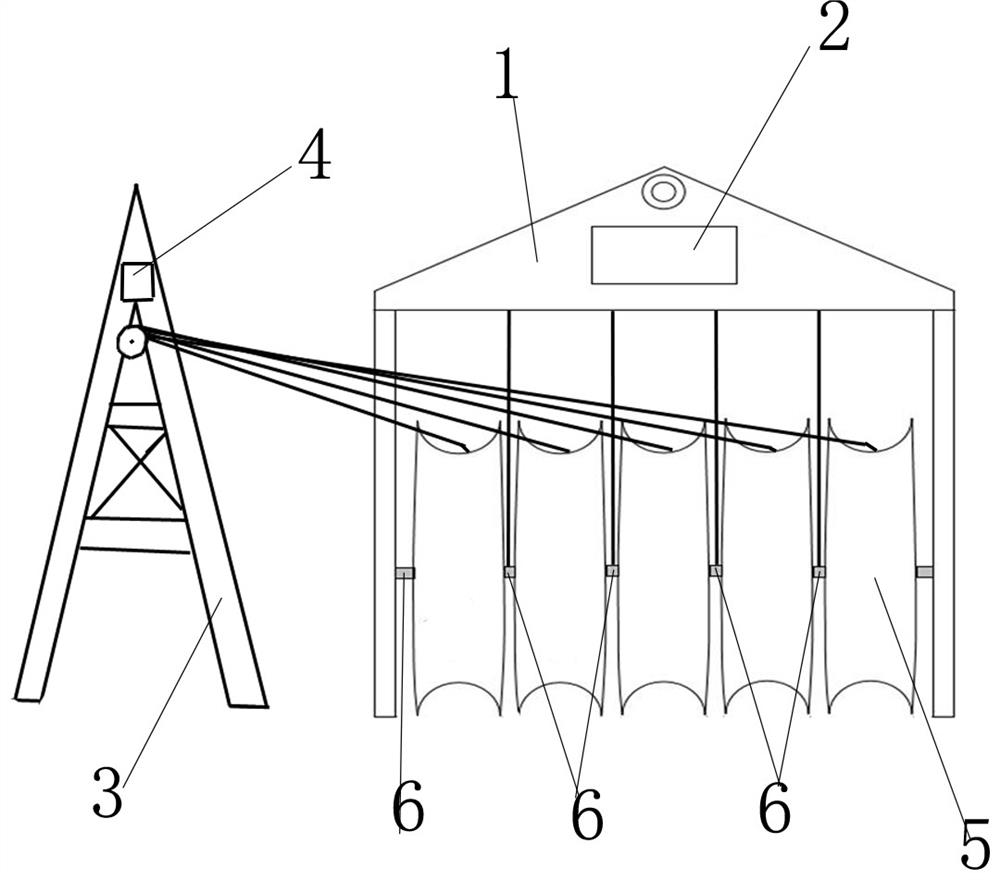
图1为本发明所述滑车传感器单元与中继器的安装结构示意图。
图2为本发明所述滑车传感器单元的结构示意图。
图3为本发明所述中继器的结构示意图。
图中:1-滑车;2-滑车传感器单元;3-塔杆;4-中继器;5-滑轮;6-六轴姿态传感器。
具体实施方式
参照图1、图2和图3,对本发明所述的一种用于架空电缆拉线滑车的无线同步监测装置进行详细说明。
一种用于架空电缆拉线滑车的无线同步监测装置,如图1、图2和图3所示,包括分别安装在滑车1上的滑车传感器单元2和安装在塔杆3上的中继器4;滑车传感器单元2包括数个分别安装在每个滑轮5支撑轴上的六轴姿态传感器6、第一天线和用于发送六轴姿态传感器6检测到的滑轮5运行数据的第一ZigBee模块,六轴姿态传感器6和第一天线均与第一ZigBee模块相连,第一ZigBee模块还连接有第一电源模块和第一键盘及显示模块;中继器4包括用于判断并发送滑轮5运行数据的微控制器、第二天线和LORA通信模块,微控制器与LORA通信模块相连接,LORA通信模块与第二天线相连接,微控制器通过第二ZigBee模块与第二天线相连,第二ZigBee模块和第一ZigBee模块进行信号传输,微控制器还连接有第二电池模块和第二键盘及显示模块。
若一台滑车1上包括五个滑轮5,那么每个滑轮5的支撑轴上均安装一个六轴姿态传感器6,六轴姿态传感器6用于检测滑轮5的角速度和加速度,五个六轴姿态传感器6分别将五个滑轮5的角速度和加速度传输给第一ZigBee模块,第一ZigBee模块控制五个六轴姿态传感器6实现时钟同步,然后第一ZigBee模块将滑车1的五个滑轮5的运行数据通过第一天线发送给中继器4,中继器4的第二ZigBee模块和滑车传感器单元2的第一ZigBee模块通过第二天线以及第一天线相连接,第二ZigBee模块将接收到的滑车1的五个滑轮5的运行数据发送给中继器4的微控制器,第二ZigBee模块和第一ZigBee模块之间实现时钟同步,第二ZigBee模块、微控制器以及LORA通信模块之间均保持时钟同步;微控制器根据预先设置的告警逻辑实时比对各个六轴姿态传感器6的角速度值和加速度值,如果发现有不同步的情况,即有滑轮5出现故障停转现象,微控制器将告警数据通过LORA通信模块发送给设置有LORA接收模块的控制中心,控制中心就能根据告警信号第一时间找到故障位置,实行抢修,最大程度上减少滑轮5停转故障对线缆的磨损。当基建现场有多个塔杆3时,每个塔杆3上均设置有中继器4,运行在相邻塔杆3之间的滑车1上均设置有滑车传感器单元2,每个滑车传感器单元2将滑轮5的运行数据传输至与其自身连接的中继器4上,中继器4的微控制器将告警数据打包后发送至与该中继器4相邻的下一个中继器4,起到中继作用,相邻中继器4之间依靠二者的LORA通信模块进行数据传输,最终离控制中心最近的中继器4将所有所述的用于架空电缆拉线滑车的无线同步监测装置的告警数据发送至控制中心。控制中心对基建现场的所有滑车1进行实时监控。LORA通信模块既能发送告警数据给控制中心,也能接收其他中继器4发来的告警信号。中继器4通过微控制器能提供时钟同步服务,根据六轴姿态传感器6的请求,实时将中继器4的心跳时钟同步给六轴姿态传感器6。而且为了减少电力消耗,六轴姿态传感器6采用间歇工作模式,在不工作的时间段里进入超低功耗运行,运行周期根据心跳时钟与其他六轴姿态传感器6保持同步,心跳时钟定期与中继器4同步。具体的,中继器中的微控制器的控制程序根据功能设置,而且所需要的控制程序为现有程序,是本领域技术人员根据需要容易想到的。
进一步的,作为本发明所述的一种用于架空电缆拉线滑车的无线同步监测装置的一种具体实施方式,微控制器还连接有声光报警器。声光报警器尽量安装在靠近地面的高度上,以便工作人员更准确、及时的接收告警信号,而且设置声光报警器,也能更加及时得实现基建现场本地告警;声光报警器与中继器实现时钟同步。
进一步的,作为本发明所述的一种用于架空电缆拉线滑车的无线同步监测装置的一种具体实施方式,第一ZigBee模块与第一电源模块之间还连接有开关稳压器稳压模块,这是为了保持滑车传感器单元2的电压稳定性。
进一步的,作为本发明所述的一种用于架空电缆拉线滑车的无线同步监测装置的一种具体实施方式,第一天线和第二天线均匀为PCB天线,第一天线和第二天线也可以设置为其他满足要求的天线。
进一步的,作为本发明所述的一种用于架空电缆拉线滑车的无线同步监测装置的一种具体实施方式,第一键盘及显示模块包括键盘组件和信号指示灯;第二键盘及显示模块包括键盘组件、信号指示灯和USB接口。通过各自的键盘组件能够对中继器4和滑车传感器单元2进行初步参数设定;信号指示灯用于指示中继器4和滑车传感器单元2的运行状态,比如中继器4和滑车传感器单元2处于待机时,指示灯亮,当中继器4和滑车传感器单元2无电时,指示灯灭;第二键盘及显示模块的USB接口用于连接PC端,对微控制器进行程序编写、设定。
进一步的,作为本发明所述的一种用于架空电缆拉线滑车的无线同步监测装置的一种具体实施方式,开关稳压器稳压模块的型号为LM11083.3;微控制器的型号为STM32F103CB;LORA通信模块的型号为SX1268;第一ZigBee模块和第二ZigBee模块的主控芯片型号为CC2540F256;第一电源模块的型号为TP4057;第二电源模块的型号为TP510。具体根据实际需要可以对上述模块做出不同的选择。
以上具体结构和数据是对本发明的较佳实施例进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变形或者替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
- 一种用于架空电缆拉线滑车的无线同步检测装置
- 一种用于架空电缆拉线滑车的无线同步检测装置