一种深海近海底多参数集成探测装置及探测方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及深海近海底参数探测领域,具体说是一种深海近海底多参数集成探测装置及探测方法。
背景技术
当今时代,当水体中的甲烷、硫化氢、溶解氧、H
以往专利:基于ROV的深海理化环境参数精准探测系统(2017210449165.3)已经在相关方面的进行了研究,主要是CTD、浊度、荧光仪、PH、甲烷、CO
综上所述,在近海底多参数集成探测方法方面国内较少研制,深海实验更是缺乏,结合国内外已有的研究经验以及利用ROV的精准定位能力,对近海底多参数集成探测方面的原位探测进行更加深入、系统的研究已成为亟待解决的问题。
发明内容
为解决上述技术问题,本发明目的是提供一种深海近海底多参数集成探测装置及探测方法,将针对目前深海近海底多参数探测的技术瓶颈,突破CTD、溶解氧、甲烷、CO
本发明为实现上述目的所采用的技术方案是:一种深海近海底多参数集成探测装置,与ROV系统连接,包括:二位三通阀、水下控制单元以及与其连接的电控二位三通阀、吸水泵、流体取样装置、传感器组A、传感器组B、微电级数据采集装置、水体获取装置以及蠕动泵;
所述水体获取装置一端用于采样,另一端经二位三通阀分别与传感器组件A和电控二位三通阀连接,所述电控二位三通阀的一个出口依次经微电级数据采集装置、传感器组件B通过排水管路与蠕动泵连接,另一个出口与流体取样装置连接;所述吸水泵与传感器组A连接。
所述传感器组A包括:温度传感器入水装置、电导率传感器入水装置、温度传感器、电导率传感器以及溶解氧传感器;
其中,所述温度传感器入水装置设有入水口和出水口,所述温度传感器入水装置与温度传感器底部连接,使温度传感器的探针内置于温度传感器入水装置内,以测量流体温度;
所述温度传感器入水装置的入水口与二位三通阀连接,出水口经电导率传感器入水装置与电导率传感器连接,以测量流体电导率;所述电导率传感器通过二通阀一入水口与溶解氧传感器连接,二通阀的另一入水口通过三通管一支管路与吸水泵连接,三通管的另一支管路用于排出管路中的残余气体;流体经三通管进入到所述吸水泵,并从吸水泵流出口流出至海水中。
所述微电级数据采集装置包括:微电级控制器、多个微电级放大器、多个采集微电级探针以及多个微电级探测舱;所述微电级控制器与水下控制单元通过线缆连接;
每个微电级探测舱上均设有微电级进水口和微电级出水口,且微电级出水口与下一个微电级探测舱的微电级进水口连接,形成通路;首个微电级探测舱的微电级进水口通过微电级输入管与电控二位三通阀连接,最末端微电级探测舱上的微电级出水口与传感器组B连接;
所述采集微电级探针竖直向下插设于微电级探测舱内,且采集微电级探针与其对应的微电级放大器连接;多个微电级放大器并列设置,且均与微电级控制器连接;
所述微电级控制器,用于实时采集微电级探针经过微电级放大器测得的PH、H
所述传感器组B包括:顺次连接的甲烷传感器和CO
所述甲烷传感器和CO
所述甲烷传感器的传感器水进口一端与所述微电级数据采集装置最末端的微电级探测舱上的微电级出水口连接;
所述当流体进入甲烷传感器的传感器水进口,依次经传感器过滤膜通道传感器过滤膜,传感器水出口后再次流经CO
所述水体获取装置为带有吸水管头的吸水管;所述吸水管为钛合金吸水管。
所述水体获取装置还包括温度探针、扩充吸水管以及探针温度传感器,所述温度探针贴附于扩充吸水管内壁上,探针温度传感器在对应温度探针的外壁扩充吸水管上,且探针温度传感器与水下控制单元连接,用于采集扩充吸水管的温度数据,当取样水体高于设定温度时,则将水体获取装置更换为温度探针、扩充吸水管以及探针温度传感器。
所述流体取样装置包括:深海步进电机、流体取样钢瓶组件、九通阀、钛合金联通管路、固定刚体、取样器固定板、旋转刚体、直角通孔以及快通接头;
其中,九通阀、固定刚体及流体取样钢瓶组件分别安装在取样器固定板上,该深海步进电机的输出端通过联轴器与九通阀转动轴连接,所述旋转刚体转动安装在固定刚体内,并通过所述九通阀转动轴与深海步进电机连动,该旋转刚体上开设有直角通孔;所述固定刚体的侧壁上沿圆周方向均布有多个九通阀出口,每个九通阀出口均连通一流体取样钢瓶组件;所述深海步进电机带动所述旋转刚体转动,所述直角通孔的一端与固定刚体上开设的九通阀垂直大口径开孔相连通,另一端在所述旋转刚体的转动过程中,依次与各个所述九通阀出口相连通;
每个所述九通阀出口内均密封连接有快通接头,每个所述快通接头分别通过钛合金联通管路与一个所述流体取样钢瓶组件上的快通接头相连;
所述九通阀垂直大口径开孔与各九通阀出口之间通过旋转刚体上开设的直角通孔转向相连,该九通阀垂直大口径开孔开设在所述固定刚体的底面;
所述九通阀垂直大口径开孔通过水体获取管路与电控二位三通阀连接。
所述流体取样钢瓶组件包括:流体取样钢瓶以及设置在其两端开口的针阀A和针阀;当开始取样时,在甲板位打开针阀A关闭针阀B;取样完成后,回收到甲板关闭针阀A,取下流体取样钢瓶通过针阀B排出使用。
所述二位三通阀上还焊接有T型把手,以供ROV机械手抓取T型把手带动水体获取装置送至采样处。
一种深海近海底多参数集成探测装置的探测方法,包括以下步骤:
1)预先将多个流体取样钢瓶抽真空,打开针阀A、关闭针阀B,利用ROV携带深海近海底多参数集成探测装置至取样处的海底位置;
2)设定好控制单元所控制的温度传感器、溶解氧传感器,电导率传感器,吸水泵,微电级控制器,甲烷传感器,CO
3)使用ROV机械手抓取T把手,使得水体获取装置上的吸水管头到达取样点,ROV通过控制单元启动吸水泵和蠕动泵,一路外界水体依次通过吸水管头、吸水管、二位三通阀、温度传感器入水装置、电导率传感器入水装置、溶解氧传感器进入至吸水泵,从吸水泵流出口,排出装置外,第二路水体依次通过吸水管头,吸水管、二位三通阀、电控二位三通阀、电控二位三通阀、微电级输入管、微电级进水口、微电级探测舱、微电级出水口、并依次通过多个微电级探测位置,进入甲烷传感器的传感器进水口、传感器过滤通道、传感器水出口后进入CO
4)在水流动的过程中各个传感器进行工作,水下控制单元进行数据采集和传输到ROV系统实时传输到岸基,进行数据存储,同时水下控制单元也存储一份数据;
5)预先判断取样和探测区域是否是温度梯度变化超过设定阈值的区域,如果是,则将吸水管替换为温度探针和扩充吸水管,使用探针温度传感器采集近吸水口的温度情况;
6)经过一段时间后,当进行水体采样时,控制单元控制电控二位三通阀启动,水体依次通过水获取管路,通过深海步进电机带动九通阀垂直大口径开孔与九通阀出口联通,水体依次通过钛合金联通管路、快通接头、针阀A以及流体取样钢瓶完成样品取样。
本发明具有以下有益效果及优点:
本发明集成国内外多参数传感器,结合流体地球化学测量,可以探测海底环境条件的化学合成生物群落的碳氢化合物渗漏。且装置集成度高、参数探测数量多、同时可以进行水体取样、长时间可控、工作灵活稳定,同时可单独使用,也可与ROV配合使用。
附图说明
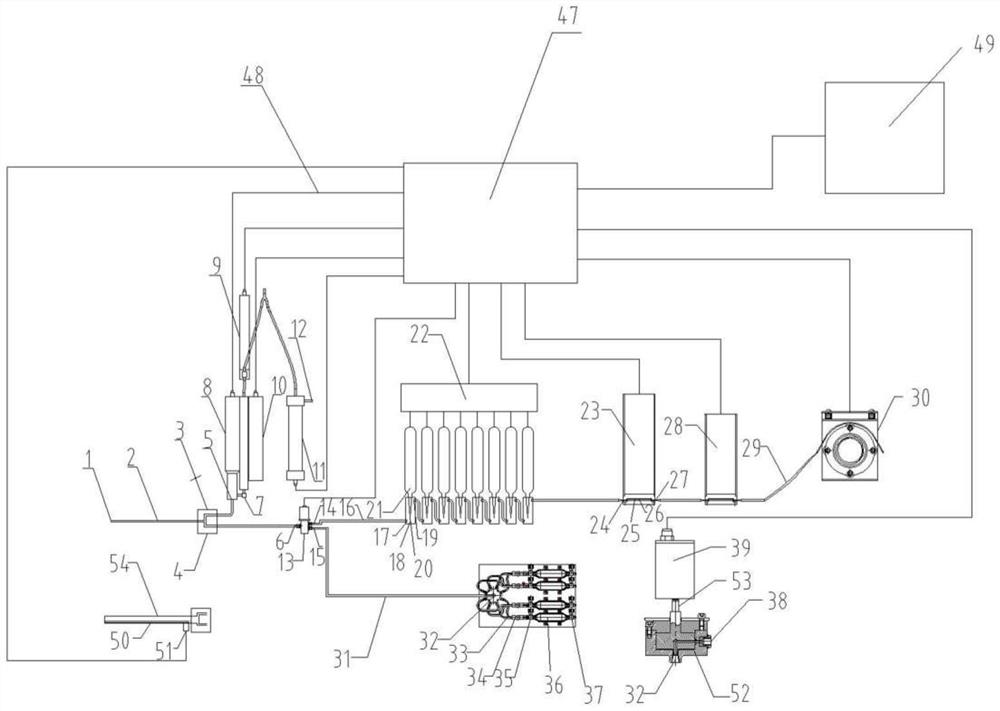
图1为本发明的工作原理图;
图2为本发明深海近海底多参数集成探测装置及方法的整体结构示意图;
图3为本发明传感器组A结构示意图及连接关系图;
图4为图2中微电级数据采集装置结构示意图;
图5为图2中电控二位三通阀的结构示意图;
图6为图2中流体取样装置结构示意图;
图7为图2中九通阀结构原理图;
图8为图2中甲烷/CO
图9为本发明蠕动泵结构示意图;
其中:1为吸水管头,2为吸水管,3为T把手,4为二位三通阀,5为温度传感器入水装置,6为电控二位三通阀进口,7为电导率传感器入水装置,8为温度传感器,9为溶解氧传感器,10为电导率传感器,11为吸水泵,12为吸水泵水流出口,13为电控二位三通阀,14为电控二位三通阀出水口A,15为电控二位三通阀出水口B,16为微电级输入管,17为微电级进水口,18为微电级探测舱,19为微电级出水口,20为微电级探针,21为微电级放大器,22为微电级控制器,23为甲烷传感器,24为传感器水进口,25为传感器过滤通道,26为传感器过滤膜,27为传感器水出口,28为CO
具体实施方式
下面结合附图及实施例对本发明做进一步的详细说明。
本发明的温度传感器入水装置5,电导率传感器入水装置7、微电级输入管16、传感器水进口24,传感器水出口27,排水管路29之间的连接软管均为法国saint-gobain(圣戈班)公司生产。
本发明的吸水管2、电控二位三通阀13,九通阀52,钛合金联通管路33,快通接头34,针阀A 35,流体取样钢瓶36,针阀B 37,使用钛合金加工完成,避免样品的污染。
如图2所示,为本发明的整体结构示意图,包括:二位三通阀4、水下控制单元47以及与其连接的电控二位三通阀13、吸水泵11、流体取样装置、传感器组A、传感器组B、微电级数据采集装置、水体获取装置以及蠕动泵44;
如图3和图5所示,为本发明传感器组A的连接关系图,水体获取装置一端用于采样,另一端经二位三通阀4分别与传感器组件A和电控二位三通阀13连接,电控二位三通阀13的一个出口依次经微电级数据采集装置、传感器组件B通过排水管路29与蠕动泵44连接,另一个出口与流体取样装置连接;吸水泵11与传感器组A连接。
传感器组A包括:温度传感器入水装置5、电导率传感器入水装置7、温度传感器8、电导率传感器10以及溶解氧传感器9;
其中,温度传感器入水装置5设有入水口和出水口,温度传感器入水装置5与温度传感器8底部连接,使温度传感器8的探针内置于温度传感器入水装置5内,以测量流体温度;
温度传感器入水装置5的入水口与二位三通阀4连接,出水口经电导率传感器入水装置7与电导率传感器10连接,以测量流体电导率;电导率传感器10通过二通阀一入水口与溶解氧传感器9连接,二通阀的另一入水口通过三通管一支管路与吸水泵11连接,三通管的另一支管路用于排出管路中的残余气体;流体经三通管进入到吸水泵11,并从吸水泵流出口12流出至海水中。
其中,CTD传感器是由SBE25温度传感器,SBE25电导率传感器、SBE 43溶解氧传感器组成,是由seabird公司购买的传感器产品。微电级传感器由丹麦“Unisense”水沉积物界面研究系统进行改造完成。甲烷和CO
如图4所示,为本发明微电级数据采集装置结构示意图,微电级控制器22、多个微电级放大器21、多个采集微电级探针20以及多个微电级探测舱18;微电级控制器22与水下控制单元47通过线缆连接;
每个微电级探测舱18上均设有微电级进水口17和微电级出水口19,且微电级出水口19与下一个微电级探测舱18的微电级进水口17连接,形成通路;首个微电级探测舱18的微电级进水口17通过微电级输入管16与电控二位三通阀13连接,最末端微电级探测舱18上的微电级出水口19与传感器组B连接;
采集微电级探针20竖直向下插设于微电级探测舱18内,且采集微电级探针20与其对应的微电级放大器21连接;多个微电级放大器21并列设置,且均与微电级控制器22连接;微电级控制器22,用于实时采集微电级探针20经过微电级放大器21测得的PH、H
如图8所示,为传感器组B中甲烷传感器或CO
甲烷传感器23和CO
甲烷传感器23的传感器水进口24一端与微电级数据采集装置最末端的微电级探测舱18上的微电级出水口19连接;
当流体进入甲烷传感器23的传感器水进口24,依次经传感器过滤膜通道25传感器过滤膜26,传感器水出口27后再次流经CO
如图9所示,为本发明蠕动泵的结构示意图;其工作原理即:蠕动泵通过辊子与蠕动泵压板41之间的一段泵管形成"枕"形流体。"枕"的体积取决于泵管的内径和转子的几何特征。流量取决于泵头的转速与"枕"的尺寸、转子每转一圈产生的"枕"的个数这三项参数之乘积。
水体获取装置为带有吸水管头1的吸水管2;吸水管2为钛合金吸水管。
水体获取装置还包括温度探针50、扩充吸水管54以及探针温度传感器51,温度探针50贴附于扩充吸水管54内壁上,探针温度传感器51在对应温度探针50的外壁扩充吸水管54上,且探针温度传感器51与水下控制单元连接,用于采集扩充吸水管54的温度数据,当取样水体高于设定温度时,则将水体获取装置更换为温度探针50、扩充吸水管54以及探针温度传感器51。
关于流体采集装置,其原理利用专利基于ROV的深海流体保真取样器的多通阀体机构(专利号CN201721825165.8),进行水体样品获取。
其中,如图6和图7所示,分别为流体取样装置和九通阀的结构示意图,九通阀体具有1入8出功能,九通阀垂直大口径开孔32为主进口,九通阀出口38为8通道出口,深海步进电机39利用联轴器与九通阀转动轴53相连,九通阀52的通断是通过深海步进电机39步进转动完成通断功能。
水下控制单元47对温度传感器8,溶解氧传感器9,电导率传感器10,吸水泵11,微电级控制器22,甲烷传感器23,CO
二位三通阀4上还焊接有T型把手3,以供ROV机械手抓取T型把手3带动水体获取装置送至采样处。ROV使用机械手抓取T把手3,放置吸水管头1到近海底取样区域完成取样。本装置可以安装于ROV本体上,也可单独使用,当安装于ROV本体时,控制单元47与ROV系统49进行相连可以进行数据通信和控制。本装置当独立使用时,控制单元47利用时间设定可进行数据采集和样品获取。
如图1~2所示,结合本发明的装置的探测方法,本发明的装置由水下控制单元47、传感器组A、传感器组B、水体获取装置、流体取样装置、微电级数据采集装置、吸水泵11组成。吸水管2前端为吸水管头1,钛合金吸水管2的后端连接二位三通阀4,一端通向温度传感器入水装置5,一端通向电控二位三通阀13的电控二位三通阀进口6,二位三通阀4的上端焊接T把手3,温度传感器入水装置5上端连接于温度传感器8,温度传感器8右侧为电导率传感器10,温度传感器8和电导率传感器10上端通过管路与溶解氧传感器9连接,溶解氧传感器9又通过三通管与吸水泵11连接。电控二位三通阀13的另外两端为电控二位三通阀出水口A14和电控二位三通阀出水口B15,电控二位三通阀出水口A14连接微电级输入管16,微电级进水口17位于微电级探测舱18的下端,内部存放微电级探针20,微电级出水口19位于微电级探测舱18的上端,微电级探针20上端直连微电级放大器21,微电级放大器21通过线缆连接微电级控制器22,依次通过8个微电级探测舱18后,通过管路与甲烷传感器水进口24连接,进入甲烷传感器的传感器过滤通道25,上端安放甲烷传感器的传感器过滤膜26,后端甲烷传感器的传感器水出口27,在与CO
九通阀垂直大口径开孔32为主进口,九通阀出口38为8通道出口,深海步进电机39利用联轴器与九通阀转动轴53相连,九通阀的通断是通过深海步进电机39步进转动完成通断功能。
当在温度梯度变化比较大的区域,需要使用温度探针50和扩充吸水管54替换吸水管2,使用探针温度传感器51采集近吸水口的温度情况。
实施例1:
步骤一,岸基端整体拆解清洗工作;深海近海底多参数集成探测装置整体进行分解拆卸,然后进行清洗;
步骤二,清洗后进行组装,预先8个流体取样钢瓶36抽真空,打开针阀A35,关闭针阀B37,利用ROV或者深海样品穿梭转运系统(ELEVATOR)携带装置到深海海底。
步骤三,使用ROV携带深海近海底多参数集成探测装置到达站点进行,使用ROV机械手抓取T把手3,使得吸水管头1到达取样点,ROV通过控制单元47启动吸水泵11和蠕动泵44,一路外界水体依次通过吸水管头1,吸水管2,二位三通阀4,温度传感器入水装置5,电导率传感器入水装置7,溶解氧传感器9,吸水泵11,吸水泵水流出口12,排出装置外,第二路水体依次通过吸水管头1,吸水管2,二位三通阀4,电控二位三通阀进口6,电控二位三通阀出水口A14,微电级输入管16,微电级进水口17,微电级探测舱18,微电级出水口19,依次通过8个微电级探测位置,进入甲烷传感器水进口24,甲烷传感器过滤通道25,甲烷传感器水出口27,进入CO
预先判断取样和探测区域是否是温度梯度变化比较大的区域,如果是需要使用温度探针50和扩充吸水管54替换吸水管2,使用探针温度传感器51采集近吸水口的温度情况。
如果使用深海样品穿梭转运系统(ELEVATOR)携带装置到深海海底,需在步骤二提前设定好水下控制单元47所控制的温度传感器8,溶解氧传感器9,电导率传感器10,吸水泵11,微电级控制器22,甲烷传感器23,CO
步骤四,经过一段时间后,当进行水体采样时,水下控制单元47控制电控二位三通阀13启动,水体依次通过水获取管路31,深海步进电机接头40转动带动九通阀垂直大口径开孔32与九通阀出口38联通,水体依次通过钛合金联通管路33,快通接头34,针阀A35,流体取样钢瓶36完成样品取样。
步骤五,利用ROV或者深海样品穿梭转运系统(ELEVATOR)携带装置到船上甲板,拆卸水体获取装置,首先关闭针阀A35完成样品封闭,依次拆卸8个针阀A35完成,针阀A35、流体取样钢瓶36、针阀B37整体拆卸。
本发明集成国内外多参数传感器,突破CTD、溶解氧、甲烷、二氧化碳、PH、H
- 一种深海近海底多参数集成探测装置及探测方法
- 一种深海底浊流多参数综合监测装置