一种地月空间卫星导航定位方法
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及地月空间卫星导航技术领域,特别地,涉及一种地月空间卫星导航定位方法。
背景技术
地月空间是指由近地空间、地月转移空间以及月球空间组成的宇宙空间。目前,全球卫星导航系统已经具备了地面以及近地空间的实时、高精度导航能力,为人类生活带来了极大便利。但是,随着航天技术的发展以及人类生存的需要,人类足迹必然从近地空间拓展到地月空间,乃至更深远的宇宙空间。未来,人类将更加频繁地往返于地球和月球,在月球进行资源开发、科学试验、物资运输等活动,不断发展地月经济圈。就像人类进入航海时代迫切需要海洋导航一样,人类开发地月空间也离不开导航定位的支持,并且随着开发活动的深入,对地月空间导航精度、实时性、自主性等要求会越来越高。在宇航员以及月面机器人进行月面活动时,需要导航定位系统的支持,帮助宇航员和月面机器人准确确定自身以及目标点的位置、速度;当空间飞行器穿梭于地月空间时,需要全程、实时进行飞行器导航定位,更好地掌握飞行器状态、实现地月转移。
目前,环绕地球运行的美国GPS系统、俄罗斯格洛纳斯系统、欧洲伽利略系统、中国北斗系统等导航星座经过升级改造后虽然可以支持部分地月空间的导航定位,但是其轨道高度分布在2~4万公里范围内,相比于地月空间尺度40万公里而言较小。绕地球的卫星导航系统进行地月空间和月面导航时,几何结构会比较差,导致定位精度较差,同时信号发射功率也可能不满足地月空间尺度内的导航要求,且无法支持月球背面的导航定位。
根据文献调研可知,文献1(专利CN201710090284.1)提出了一种基于地球高轨卫星和地月平动点附近卫星组成的导航星座系统,可以实现地月空间的导航功能,其基本方法是首先利用脉冲星实现导航星座的定位,然后根据目标卫星与导航星座的星间测距信息确定目标卫星位置。但是,地球高轨卫星和地月平动点附近卫星基本上分布在白道面(即月球绕地球公转的轨道平面)内或白道面附近,距离白道面的法向高度不超过4万公里,而实际上地月转移空间的尺度在40万公里左右,这样单纯依靠地球高轨卫星和地月平动点附近卫星进行导航定位时,观测得到的白道面法向定位精度较差,从而导致地月转移空间内三维位置和速度确定精度较差。同时,单纯依靠地球高轨卫星和地月平动点附近卫星难以有效覆盖全月面,也就无法实现全月面的高精度导航定位。
文献2【陈雷,黄仰博,刘文祥,欧钢.多全球导航卫星系统联合的探月飞行器轨道定位分析.国防科技大学学报,2015,37(3):39-44.】分析了基于美国GPS、中国北斗、欧洲伽利略等系统实现地月空间导航的方案,并进行了模拟仿真,研究了各系统联合定位时波束主瓣和旁瓣的可用性,同时对各系统联合应用时的精度因子进行了评估。但是,由于这些导航系统的轨道高度相对地月空间尺度而言较小,因此与文献[1]一样,文献[2]提出的地月空间导航系统几何观测结构较差,地月转移空间以及月面的导航精度有限。同时,由于月球一面始终指向地球、另一面始终背对地球,因此GPS、北斗、伽利略等系统无法实现月球背面的导航定位。
文献3(专利CN201210504473.6)提出了通过利用地球卫星与月球卫星之间的星间测距数据以及地月动力学模型,联合解算地球卫星和月球卫星的空间位置估算值,实现地月空间导航。该方法在理论上是可行的,但是由于仅有一组星间测距,通过联合解算得到的月球卫星定位精度十分有限;同时,联合解算需要高精度的动力学模型,地球卫星或月球卫星由于任务需要通常具备轨道和姿态机动能力,而推进器输出力的精度通常难以满足联合解算要求,也就是说这种基于星间测距模式的地月空间导航方法不适用于推进输出精度较差的卫星定位。
文献4【潘晓,徐明,姚闯,曲庆渝.悬浮太阳帆地月导航星座设计.第七届中国卫星导航学术年会,S04卫星轨道与钟差,2016年5月18日-20日,湖南长沙.】考虑到已有的绕地球卫星导航系统在进行地月空间导航时具有几何观测结构较差的缺陷,提出了基于太阳帆的地月空间导航系统,在太阳-地球-月球系统的人工拉格朗日点上布置太阳帆,利用太阳帆受到的太阳光压抵消地月引力,保证太阳帆长期稳定位于地月空间中,实现地月空间导航目的。但是,由于太阳帆受到的光压、地月引力都极其复杂,两者难以精确抵消,这样太阳帆的轨道难以精确确定,导致基于太阳帆导航星座的定位精度受到影响。
文献5【张磊.地月系平动点导航卫星星座设计与导航性能分析.南京大学博士学位论文,2016.】提出了利用地月平动点卫星组成地月空间导航星座的方案,包括地月系L1-L2双星星座、L2-L4-L5三星星座、L1-L2-L4-L5四星星座等,分析了不同星座的导航能力,为未来地月空间导航系统设计提供了重要的技术参考。但是,由于这些平动点位于白道面内,因此基于该方案的导航系统在白道面内导航精度较高,但是在白道面法向定位精度极差,甚至无法解算,难以满足地月空间高精度导航定位需求。
因此,迫切需要针对地月空间飞行任务的导航定位需求,发展地月空间导航星座,为地月空间发展提供高精度的导航服务。
发明内容
本发明提供了一种地月空间卫星导航定位方法,以解决现有的地月空间导航星座难以满足整个地月空间大尺度范围内的高精度导航定位需求的技术问题。
根据本发明的一个方面,提供一种地月空间卫星导航定位方法,包括以下步骤:
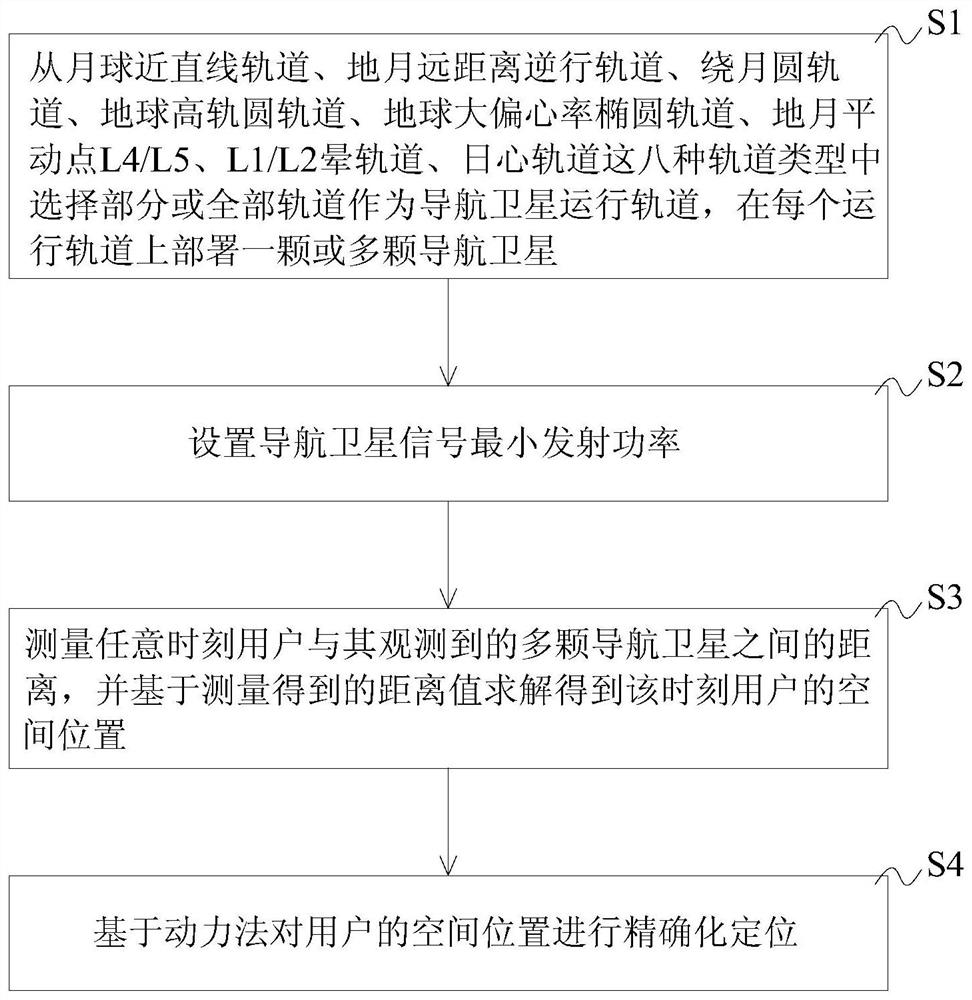
步骤S1:从月球近直线轨道、地月远距离逆行轨道、绕月圆轨道、地球高轨圆轨道、地球大偏心率椭圆轨道、地月平动点L4/L5、L1/L2晕轨道、日心轨道这八种轨道类型中选择部分或全部轨道作为导航卫星运行轨道,在每个运行轨道上部署一颗或多颗导航卫星;
步骤S2:设置导航卫星信号最小发射功率;
步骤S3:测量任意时刻用户与其观测到的多颗导航卫星之间的距离,并基于测量得到的距离值求解得到该时刻用户的空间位置。
进一步地,还包括以下步骤:
步骤S4:基于动力法对用户的空间位置进行精确化定位。
进一步地,所述步骤S4具体包括以下步骤:
步骤S41:基于用户的空间位置得到用户的空间状态观测值;
步骤S42:基于地月空间动力学模型和用户初始状态进行动力学积分得到用户的空间状态计算值;
步骤S43:根据用户空间状态的观测值和计算值之间的差异不断迭代调整地月空间动力学模型参数和用户初始状态,直至用户空间状态的观测值和计算值的差异满足导航精度要求,将迭代结束后的用户空间状态计算值作为高精度导航值。
进一步地,所述步骤S1中通过以下步骤从八种轨道类型中选择部分轨道作为导航卫星运行轨道:
步骤S11:基于轨道分布在白道面或者白道面法向的分类规则对上述八种轨道类型进行分类;
步骤S12:按照白道面内靠近月球、白道面内靠近地球、白道面法向靠近月球、白道面法向靠近地球这四种空间分布均存在的原则选择不同轨道类型进行组合;
步骤S13:计算不同轨道类型组合的空间位置精度因子以确定其观测几何结构的优劣,并结合地月空间覆盖性要求对星座构型参数进行迭代优化。
进一步地,所述地月空间覆盖性要求指的是在地月空间任意一点在任意时刻能够观测到至少四颗导航卫星;
所述空间位置精度因子通过以下步骤计算得到:
假设不同轨道类型组合形成的地月空间导航星座中有N颗导航卫星,用户相对于这些导航卫星的仰角和方位角分别为θ
定义几何矩阵G和权系矩阵H:
H=(G
则空间位置精度因子为
其中,h
进一步地,所述导航卫星信号最小发射功率通过以下公式计算得到:
其中,P
进一步地,所述步骤S3具体包括以下步骤:
步骤S31:获取任意时刻用户观测到的至少四颗导航卫星的空间位置;
步骤S32:测量用户与这些导航卫星之间的距离;
步骤S33:基于距离测量结果求解得到该用户的空间位置。
进一步地,所述步骤S31中的导航卫星的空间位置通过地基无线电测量得到或者通过星座预报自主获取。
进一步地,导航卫星的空间位置通过星座预报自主获取的过程具体包括以下步骤:
步骤S311:基于地基无线电测量手段获取地月空间导航星座中每颗导航卫星的初始位置和初始速度;
步骤S312:构建任意两颗导航卫星的星间距离、星间距离变化率与地月空间动力学模型参数之间的关系式;
步骤S313:通过星间测距方式测量得到任意两颗导航卫星之间的星间距离和星间距离变化率;
步骤S314:基于上述关系式和测量结果联合求解得到地月空间动力学模型参数和导航卫星的初始状态修正值;
步骤S315:每间隔一段时间重复执行上述步骤S312-S314以得到最新的地月空间动力学模型参数和导航卫星初始状态,利用最新的导航卫星初始状态和地月空间动力学模型参数进行星座星历预报。
进一步地,所述步骤S32中通过用户接收机的伪距、载波相位或者多普勒频移测量得到任意时刻用户与导航卫星的距离。
本发明具有以下效果:
本发明的地月空间卫星导航定位方法,通过从月球近直线轨道、地月远距离逆行轨道、绕月圆轨道、地球高轨圆轨道、地球大偏心率椭圆轨道、地月平动点L4/L5、L1/L2晕轨道、日心轨道这八种轨道类型中选择部分或全部轨道作为导航卫星运行轨道,可以满足整个地月空间大尺度范围内的导航定位覆盖需求,为实现地月空间高精度导航定位提供支持。并且,基于几何求解的方式可以实时得到用户的空间位置,定位速度快且具有较高的导航定位精度,可以为地月空间发展提供高精度的导航服务。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1是本发明优选实施例的地月空间卫星导航定位方法的流程示意图。
图2是本发明优选实施例的步骤S1中的月球近直线轨道和地月远距离逆行轨道的分布示意图。
图3是本发明优选实施例的步骤S1中的地球大偏心率椭圆轨道的分布示意图。
图4是本发明优选实施例的步骤S1中的地月平动点L4/L5的分布示意图。
图5是本发明优选实施例的步骤S1中的L1/L2晕轨道的分布示意图。
图6是本发明优选实施例的步骤S1中从八种轨道类型中选择部分轨道作为导航卫星运行轨道的过程的子流程示意图。
图7是本发明优选实施例的步骤S3的子流程示意图。
图8是图7中的步骤S31中通过星座预报自主获取导航卫星空间位置的过程的子流程示意图。
图9是图1中的步骤S4的子流程示意图。
具体实施方式
以下结合附图对本发明的实施例进行详细说明,但是本发明可以由下述所限定和覆盖的多种不同方式实施。
如图1所示,本发明的优选实施例提供一种地月空间卫星导航定位方法,包括以下步骤:
步骤S1:从月球近直线轨道、地月远距离逆行轨道、绕月圆轨道、地球高轨圆轨道、地球大偏心率椭圆轨道、地月平动点L4/L5、L1/L2晕轨道、日心轨道这八种轨道类型中选择部分或全部轨道作为导航卫星运行轨道,在每个运行轨道上部署一颗或多颗导航卫星;
步骤S2:设置导航卫星信号最小发射功率;
步骤S3:测量任意时刻用户与其观测到的多颗导航卫星之间的距离,并基于测量得到的距离值求解得到该时刻用户的空间位置。
可以理解,在所述步骤S1中,从上述八个轨道类型中选择部分或者全部轨道作为导航卫星运行轨道,并在每个运行轨道上部署一颗或多颗导航卫星,这些导航卫星即构成了地月空间导航星座。这种轨道类型的选择可以满足整个地月空间大尺度范围内的导航定位覆盖需求,为实现地月空间高精度导航定位提供支持。另外,每个导航卫星上均至少搭载了两类关键载荷,分别是导航信号发射器,其用于广播测距码、导航电文、载波信号等导航信息,为地月空间导航提供信息服务;星间测距仪,可采用微波或激光测距装置,用于获取两颗导航卫星之间的距离及其变化率,为后续的月球重力场、太阳光压等地月空间动力学模型参数反演提供观测数据,以获取高精度的动力学模型以及导航卫星初始状态,为星座星历预报提供支持。
其中,如图2所示,月球近直线轨道在地月旋转坐标系下近似为一条月球极轨道,可以长期有效覆盖月球两极。但是与月球极轨道不同的是,受地月引力共同作用影响,月球近直线轨道的轨道面始终与地月连线近似垂直。并且,通常采用两条近直线轨道,远月点分别位于月球北极和南极,在南、北近直线轨道上,分别等时间间隔布置若干颗导航卫星,用于支持月球表面两极的高精度导航、地月转移空间白道面法向导航以及地月L1/L2 Halo轨道飞行器导航。而地月远距离逆行轨道则在月球赤道平面内,包含地月平动点L1、L2,如图2所示,该轨道具有高度的稳定性,可以几十年甚至几百年保持长期稳定。在地月远距离逆行轨道上等间隔部署若干颗导航卫星,用于支持地月转移空间白道面内导航、月球表面导航及地月L1、L2 Halo轨道飞行器导航。绕月圆轨道分布在若干个轨道面内,这些轨道面的升交点沿月球赤道均匀分布。在每个轨道面内均匀分布若干颗导航卫星,形成对月面的全覆盖,支持月球表面和低轨环月卫星的高精度导航。针对地月空间导航任务,选择合理的绕地球高轨卫星轨道高度和轨道面分布,这些轨道面相对升交点均匀分布,并在每个轨道面上均匀部署若干颗导航卫星,使其对地月空间具有较好的几何分布结构。如图3所示,地球大偏心率椭圆轨道则包括北大偏心率椭圆轨道和南大偏心率椭圆轨道,其轨道面与白道面的夹角接近90°,远地点分别位于地球的北极和南极。在南、北地球大偏心率椭圆轨道上,分别等时间间隔布置若干颗导航卫星,确保沿白道面法向的导航定位精度。如图4所示,在地月平动点L4、L5点上分别布置一颗导航卫星,由于L4/L5点位于白道面内,因此位于这两个位置上的导航卫星可以保证白道面内或平行于白道面的导航定位精度。如图5所示,L1/L2Halo轨道分别位于地月连线的月球两侧,在L1/L2 Halo轨道上,分别等时间间隔布置若干颗导航卫星,以确保白道面内以及白道面法向的导航定位精度。而日心轨道则选择地球公转轨道,卫星分别部署于相对地球前后相位的位置,确保白道面内和白道面法向的导航定位精度。
可以理解,本实施例的地月空间卫星导航定位方法,通过从月球近直线轨道、地月远距离逆行轨道、绕月圆轨道、地球高轨圆轨道、地球大偏心率椭圆轨道、地月平动点L4/L5、L1/L2晕轨道、日心轨道这八种轨道类型中选择部分或全部轨道作为导航卫星运行轨道,可以满足整个地月空间大尺度范围内的导航定位覆盖需求,为实现地月空间高精度导航定位提供支持。并且,基于几何求解的方式可以实时得到用户的空间位置,定位速度快且具有较高的导航定位精度,可以为地月空间发展提供高精度的导航服务。
可以理解,若全部选取上述八个轨道类型作为导航卫星运行轨道,虽然可以确保满足整个地月空间的导航定位覆盖要求,但是会存在设计冗余,一些导航卫星的导航定位作用会存在重叠,整个导航星座的有效利用率不高,而且还会带来较大的运营和维护成本。因此,本发明优选采用从上述八种轨道类型中筛选出部分轨道作为导航卫星运行轨道,既可以满足整个地月空间的导航定位覆盖要求,而且整个导航星座的有效利用率较高,降低了整个星座的运营和维护成本。具体地,如图6所示,所述步骤S1中通过以下步骤从八种轨道类型中选择部分轨道作为导航卫星运行轨道:
步骤S11:基于轨道分布在白道面或者白道面法向的分类规则对上述八种轨道类型进行分类;
步骤S12:按照白道面内靠近月球、白道面内靠近地球、白道面法向靠近月球、白道面法向靠近地球这四种空间分布均存在的原则选择不同轨道类型进行组合;
步骤S13:计算不同轨道类型组合的空间位置精度因子以确定其观测几何结构的优劣,并结合地月空间覆盖性要求对星座构型参数进行迭代优化。
可以理解,当地月空间导航星座中的卫星轨道同时分布在白道面内和白道面法向时,导航星座会具有较好的几何结构,从而导航精度较高。故而在所述步骤S11中,按照上述八种轨道类型分布是在白道面或者白道面法向来进行分类,甚至于进一步按照其靠近月球还是靠近地球进行分类,具体如表一所示。
表一、八种轨道类型及其分类
然后在步骤S12中按照白道面内靠近月球、白道面内靠近地球、白道面法向靠近月球、白道面法向靠近地球这四种空间分布均存在的原则选择不同轨道类型进行组合,因为在不同的轨道类型组合中,当这四种空间分布均存在时可以确保整个地月空间内对导航星座具有较好的观测几何机构,从而实现高精度导航。例如,月球近直线轨道、地球大偏心率椭圆轨道、地月平动点L4/L5组成的轨道组合可以组成地月空间导航星座,地月平动点L4/L5、绕月圆轨道、地球高轨圆轨道组成的轨道组合也可以组成地月空间导航星座。
前面的分类筛选方式可以初步筛选出不同导航星座几何结构的优劣,但是其并没有进行具体的量化指标计算,故而筛选准确度还有待提高。因此,在所述步骤S13中,对步骤S12中筛选出来的不同轨道类型组合形成的导航星座进行空间位置精度因子(PDOP)要求计算,通过量化指标计算进一步评估不同导航星座几何结构的优劣,并且,还结合地月空间覆盖性要求对星座构型参数进行迭代优化,进一步提高了导航精度。
其中,所述地月空间覆盖性要求指的是在地月空间任意一点在任意时刻能够观测到至少四颗导航卫星,进一步确保星座可以有效覆盖整个地月空间,并且也为后续的用户空间位置求解提供数据支持。而空间位置精度因子(PDOP)要求指的是地月空间任意一点相对可观测导航卫星的几何结构较好,而PDOP值则越小越好。具体地,所述空间位置精度因子通过以下步骤得到:
假设不同轨道类型组合形成的地月空间导航星座中有N颗导航卫星,用户相对于这些导航卫星的仰角和方位角分别为θ
定义几何矩阵G和权系矩阵H:
H=(G
则空间位置精度因子为
其中,h
通过计算不同地月空间导航星座的PDOP值,当其PDOP值小于阈值时,则评定该导航星座具有较好的几何结构。而迭代优化的过程具体是以降低PDOP值和提高地月空间覆盖性作为优化目标,不断迭代优化星座构型参数,直至满足一定的迭代次数或者PDOP值小于阈值且地月空间任意一点在任意时刻能够观测到至少四颗导航卫星,迭代终止。其中,星座构型参数包括但不限于星座中的导航卫星的运动参数、导航卫星之间的距离参数、导航卫星之间的角度参数等。
可以理解,在所述步骤S1中,先基于八种轨道类型的轨道分布进行分类,然后按照白道面内靠近月球、白道面内靠近地球、白道面法向靠近月球、白道面法向靠近地球这四种空间分布均存在的原则选择不同轨道类型进行组合,可以初步筛选出不同导航星座几何结构的优劣,然后再进一步计算不同轨道类型组合形成的地月空间导航星座的空间位置精度因子,通过量化指标计算进一步评估不同导航星座几何结构的优劣,并且,还结合地月空间覆盖性要求对星座构型参数进行迭代优化,进一步提高了导航精度。
可以理解,在所述步骤S2中,所述导航卫星信号最小发射功率通过以下公式计算得到:
其中,P
在设置导航卫星的导航信号发射功率时,以星座中导航卫星与用户的最远距离来计算得到导航卫星的最小导航信号发射功率,从而确保用户可以成功接收到其观测到的导航卫星发射的导航信号。在设置完导航卫星的导航信号发射功率后再向用户发射导航信号,确保用户可以成功地接收到有效导航信号,进而后续可以测量得到用户与其观测到的导航卫星之间的距离。
如图7所示,所述步骤S3具体包括以下步骤:
步骤S31:获取任意时刻用户观测到的至少四颗导航卫星的空间位置;
步骤S32:测量用户与这些导航卫星之间的距离;
步骤S33:基于距离测量结果求解得到该用户的空间位置。
可以理解,在所述步骤S31中,导航卫星的空间位置通过地基无线电测量得到或者通过星座预报自主获取。
其中,如图8所示,导航卫星的空间位置通过星座预报自主获取的过程具体包括以下步骤:
步骤S311:基于地基无线电测量手段获取地月空间导航星座中每颗导航卫星的初始位置和初始速度;
步骤S312:构建任意两颗导航卫星的星间距离、星间距离变化率与地月空间动力学模型参数之间的关系式;
步骤S313:通过星间测距方式测量得到任意两颗导航卫星之间的星间距离和星间距离变化率;
步骤S314:基于上述关系式和测量结果联合求解得到地月空间动力学模型参数和导航卫星的初始状态修正值;
步骤S315:每间隔一段时间重复执行上述步骤S312-S314以得到最新的地月空间动力学模型参数和导航卫星初始状态,利用最新的导航卫星初始状态和地月空间动力学模型参数进行星座星历预报。
具体地,通过地基无线电测量手段获取星座中每颗导航卫星的初始位置x
然后,设需要考虑的月球引力场位系数为C
ρ
由于导航卫星的位置和速度都是三维空间中的矢量,则上式中含有n+m+p+12个未知数,求解出这些未知数至少需要(n+m+p+12)/2个采样点的星间距离和星间距离变化率,求解得到的这n+m+p+12个未知数中除地月空间动力学参数外,还包括导航卫星i、j的初始状态修正值x
对于地月空间导航星座中任意两颗导航卫星均建立上述关系式,然后利用高精度激光星间测距或者微波星间测距测量得到两颗导航卫星之间的星间距离值和星间距离变化率值,然后联合求解得到地月空间动力学模型参数和导航卫星的初始状态修正值(C
每隔一定时间通过星间测距数据处理得到最新的地月空间动力学模型参数后,并结合修正后的导航卫星初始状态进行星历预报,从而实现星座星历的长期高精度、全自主获取,支撑星座长期全自主运行,实现不依赖于地面的地月空间导航全自主运行,从而星座中每颗导航卫星的空间位置即可通过星座预报自主获取。
可以理解,所述步骤S31中提出了星座导航任务全自主运行方法,在星座上利用导航卫星与导航卫星之间的星间测距信息反演地月动力学模型,然后利用更新后的动力学模型、星座初始状态参数进行星座星历的高精度预报,实现不依赖于地面的地月空间导航全自主运行。
在所述步骤S32中,在导航卫星发射出导航信号后,具体通过用户接收机的伪距、载波相位或者多普勒频移测量得到任意时刻用户与导航卫星的距离。
另外,基于步骤S13和S31可知,地月空间任意一点(x,y,z)在任意时刻可以观测到N颗导航卫星,N≥4,并且这些导航卫星的空间位置可以通过星历预报自主获取或者通过地基无线电测量得到,设为(x
在所述步骤S33中,建立用户与导航卫星之间的距离计算表达式:
其中,c为光速,δt为导航卫星和用户之间的时间差,(x
这里仅有四个未知数,即用户空间位置(x,y,z)和时间差δt。由于地月空间任意一点(x,y,z)在任意时刻可以观测到至少4颗导航卫星,对观测到的N颗导航卫星均建立上述方程,即可联立求解得到用户的空间位置(x,y,z),在得到用户的准确位置后,即可进行高精度导航定位。
可以理解,上述步骤S3中通过几何法进行用户空间位置的求解,其可以实现用户空间位置的实时获取,定位速度快且具有较高的导航定位精度。
但是考虑到几何法进行空间位置求解的误差度较大,在实际过程中,其位置精度误差在几米至几十米的范围内。故,为了进一步提高定位精度,作为优选的,所述地月空间卫星导航定位方法还包括以下步骤:
步骤S4:基于动力法对用户的空间位置进行精确化定位。
具体地,如图9所示,所述步骤S4具体包括以下步骤:
步骤S41:基于用户的空间位置得到用户的空间状态观测值;
步骤S42:基于地月空间动力学模型和用户初始状态进行动力学积分得到用户的空间状态计算值;
步骤S43:根据用户空间状态的观测值和计算值之间的差异不断迭代调整地月空间动力学模型参数和用户初始状态,直至用户空间状态的观测值和计算值的差异满足导航精度要求,将迭代结束后的用户空间状态计算值作为高精度导航值。
基于步骤S3中获得的用户的空间位置进行差分处理后得到用户的空间速度,从而得到用户的空间状态(即空间位置和空间速度)观测值X
具体过程如下:
设地月空间用户位置矢量r和速度矢量
X=X(X
X(t
定义状态转移矩阵Φ和参数敏感度矩阵S如下:
而状态转移矩阵Φ和参数敏感度矩阵S的计算方法如下:
(1)Φ和S组成矩阵Ψ(t),即:
Ψ(t)=(Φ(t)S(t))
(2)矩阵Ψ(t)满足如下微分方程:
初始条件为Ψ(t
(3)通过求解上述微分方程,得到矩阵Ψ(t),进而得到状态转移矩阵Φ和参数敏感度矩阵S。
设地月空间用户空间状态的计算值为X(t),观测值为X
ΔX=X
对于地月空间用户而言,在观测时间序列中任意时刻均可以建立上述方程,联立这些方程,求解得到用户初始状态调整量ΔX
可以理解,在所述步骤S4中,基于几何法求解得到的用户空间状态观测值与基于动力学积分计算得到的空间状态计算值进行比对,并基于观测值和计算值之间的差异不断迭代调整地月空间动力学模型参数和用户初始状态,对地月空间动力学模型参数和用户初始状态进行不断修正,不断迭代优化地月空间动力学模型的精度,并将迭代优化结束后通过轨道积分计算得到的计算值作为最终的导航值,其精度可以达到厘米级别,相比于前面的几何法求解空间位置,大大提升了导航定位精度。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种地月空间卫星导航定位方法
- 一种地月空间航天器单向自主导航方法