用于高刷新率LED阵列的动态像素诊断
文献发布时间:2023-06-19 11:17:41
相关申请的交叉引用
本申请要求2019年6月28日提交的美国专利申请号16/456,868、2019年6月28日提交的美国专利申请号16/456,874、2018年10月31日提交的欧洲专利申请号18203783.8和2018年9月10日提交的美国临时专利申请号62/729,244的优先权,其中每一项都通过引用被整体结合到本文中。
技术领域
本公开一般涉及具有外部数据图像输入的微控制器,该微控制器能够以高速图像刷新速度支持可寻址的LED像素阵列。
背景技术
虽然已经使用了支持CMOS电路的LED像素阵列,但是适合于商业用途的实际实施可能面临严重的制造、电力和数据管理问题。可能需要以30-60 Hz的刷新率来控制数以千计的发光像素的单独的光亮度。许多应用都需要高数据刷新率,以及需要支持各种各样的校准、测试和控制方法的系统。
发明内容
在一个实施例中,LED控制器包含图像缓冲器,以保存图像数据。响应于图像数据、LDO状态以及脉冲宽度调制模块状态,形成大像素阵列的一部分的LED像素是可激活的。包含使用LDO旁路的像素诊断模式的逻辑模块被连接,以便修改LDO状态以及允许用于诊断目的对LED像素的直接寻址,而不需要使用来自图像缓冲器的图像数据。
在一个实施例中,当激活LDO旁路时,图像缓冲器有效地从LED像素断开连接。
在另一个实施例中,脉冲宽度调制器连接在图像帧缓冲器和LED像素之间。脉冲宽度调制器可以在读取图像缓冲器期间加载占空比。在其他的实施例中,脉冲宽度调制器支持可配置的每像素前沿相移。
在使用LDO旁路时,行选择和列选择被用来选择要激活的特定LED像素。可以为LED像素提供数据线、旁路线、PWMOSC线、V
在另一个实施例中,用于LED像素阵列的LED控制器包含响应于行和列选择信号被激活的开关K1;响应于脉冲宽度调制占空比被激活的开关K2;以及提供来自Vbias的电流源的开关K3。像素激活至少部分由开关K1和K2的状态确定。在操作中,在LED像素阵列中的LED像素由开关K1选择,并且LED像素的故障确定基于Vf总线上确定的Vf来实现。
在另一个实施例中,用于LED像素阵列的LED控制器包含提供行和列选择信号的逻辑;具有占空比的脉冲宽度调制器;以及,LED像素阵列中至少部分根据脉冲宽度调制器的占空比以及行和列选择信号的状态被激活的LED像素。LED像素的故障确定基于Vf总线上确定的Vf来实现。
附图说明
图1是图示了使用主动前灯采用离散区段形式的道路照明的简图;
图2图示了定位成与静态照明模块相邻的动态像素可寻址照明模块;
图3A是用于控制主动前灯的车辆前灯系统的一个实施例;
图3B是用于控制与车辆处理输出连接的主动前灯的车辆前灯系统的一个实施例;
图4是主动前灯控制器的一个实施例的示意图;
图5是用于LED像素阵列的微控制器组件的图示;
图6A和图6B分别图示了用于像素控制电路的LDO旁路电路和栅极时序图;
图6C和图6D分别图示了替代的像素控制电路和栅极时序图;以及
图7图示了具有支持LDO旁路的行和列选择的主动矩阵像素阵列。
具体实施方式
发光像素阵列可以支持得益于光分布的细密纹理亮度、空间和时间控制的应用。这可以包含,但不局限于,从像素块或单独像素发出的光的精确的空间图案结构。取决于应用,发出的光可以是光谱不同的,随着时间适应的,和/或环境响应的。发光像素阵列可以以各种亮度、空间或时间模式提供预编程的光分布。发出的光可以至少部分基于接收到的传感器数据,并且可以被用于光学无线通信。在像素、像素块或装置级别,相关联的光学器件可以是不同的。一个示例的发光像素阵列可以包含具有高亮度像素的通用受控中心块的装置,高亮度像素具有相关联的通用光学器件,而边缘像素可以具有单独的光学器件。由发光像素阵列支持的常见应用包含视频照明、机动车前灯、建筑和区域光照、街道照明以及信息显示。
发光像素阵列可以被用来选择性地和适应性地照亮建筑物或区域,用于改善的视觉显示或减少照明成本。此外,发光像素阵列可以被用来投射媒介立面(facades),用于装饰性运动或视频效果。结合追踪传感器和/或拍摄设备,对行人周围区域的选择性光照是可能的。光谱不同的像素可以被用来调节照明的色温,以及支持特定波长的园艺光照。
街道照明是一种重要的应用,其可以大大地得益于发光像素阵列的使用。单一类型的发光阵列可以被用来模拟各种路灯类型,例如,允许通过对选定像素的合适的激活或去激活,在类型I线状路灯和类型IV半圆状路灯之间切换。此外,根据环境情况或使用时间,通过调节光束亮度或分布,可以降低街道照明成本。例如,当不存在行人时,可以减少光亮度和分布区域。如果发光像素阵列的像素是光谱不同的,则可以分别根据白天、黄昏或夜晚的情况来调节光的色温。
发光阵列也非常适合于支持需要直接或投射显示的应用。例如,警告、紧急情况或信息标志都可以使用发光阵列来显示或投射。这允许,例如,颜色变换或闪光的出口标志被投射。如果发光阵列由大量像素组成,则可以展现文本或数字信息。也可以提供方向箭头或类似的指示符。
车辆前灯是需要大量像素数目和高数据刷新率的发光阵列应用。只主动照亮道路选定部分的机动车前灯可以用来减少与迎面而来的司机的眩光或耀眼相关联的问题。使用红外拍摄设备作为传感器,发光像素阵列只激活照亮道路所需的那些像素,而不激活可能使行人或迎面而来的车辆的司机目眩的像素。此外,可以选择性地照亮道路之外的行人、动物或标志,以改善司机的环境意识。如果发光像素阵列的像素是光谱不同的,则可以分别根据白天,黄昏或夜晚的情况来调节光的色温。一些像素可以被用于光学无线的车辆对车辆的通信。
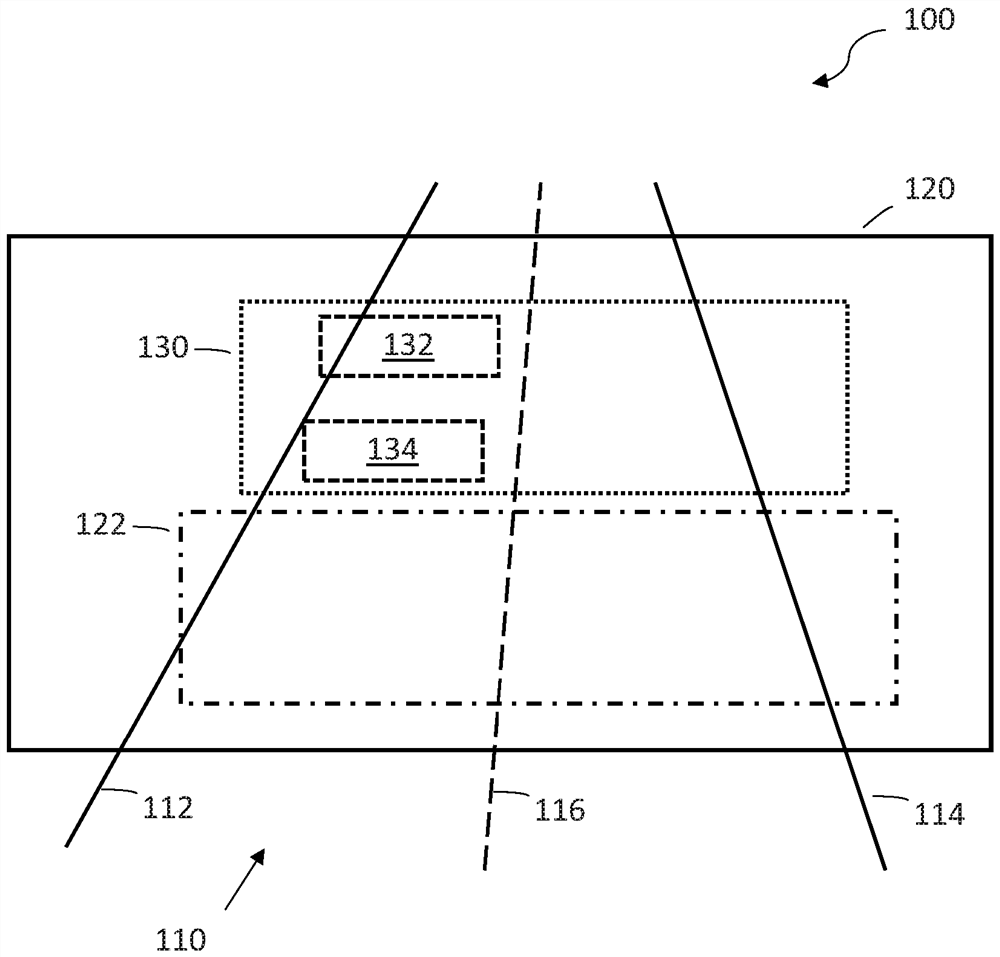
发光阵列的一种高价值应用关于图1被图示,图1显示了照亮车辆前方范围120的车辆前灯系统的可能的道路光照模式100。如图所示,道路110包含左边缘112、右边缘114和中心线116。在这个示例中,两个主要的范围被照亮:向下指向的静态照亮范围122和动态照亮范围130。范围130内的光亮度可以被动态地控制。例如,当迎面而来的行驶在中心线116和左边缘112之间的车辆(未示出)移动到子范围132中时,光亮度可以被减小或完全关掉。随着迎面而来的车辆朝向子范围134移动,一系列子范围(未示出)可以被限定,以便也具有减小的光亮度,从而减少不安全的耀眼或眩光的可能性。将认识到的是,在其他实施例中,光亮度可以被增加,以突出道路标志或行人,或调节空间光照模式以允许,例如,对弯曲道路的动态光追踪。
图2图示了照明模块200的定位,该照明模块能够提供诸如关于图1所讨论的照明模式。LED灯模块222可以仅仅包含多个LED,或者与包含透镜或反射器的初级或次级光学器件结合地包含多个LED。为了减少总的数据管理需求,灯模块222可以被限制成开/关功能,或者限制成在相对较少的光亮度级别之间切换。像素级别的光亮度控制不一定被支持。
定位成与LED灯模块22相邻的是主动LED阵列230。该LED阵列包含CMOS裸芯202,具有像素区域204和替代性可选择LED区域206和208。像素区域204可以具有104行和304列,总共31616个像素分布在12.2毫米乘以4.16毫米的区域上。可选择LED区域206和208允许选择适合不同车辆前灯或应用的不同的长宽比。例如,在一个实施例中,可选择LED区域206可以具有1:3的长宽比,具有82行和246列,总共20172个像素分布在10.6毫米乘以4毫米的区域上。替代地,可选择LED区域208可以具有1:4的长宽比,具有71行和284列,总共20164个像素分布在12.1毫米乘以3.2毫米的区域上。在一个实施例中,像素可以被主动地管理,以具有10位的亮度范围以及在30 Hz和100 Hz之间的刷新率,其中典型的操作刷新率是60 Hz或更大。
图3A图示了车辆前灯系统300的一个实施例,该车辆前灯系统包括包含数据总线(304)的车辆支持的电力(302)和控制系统。传感器模块306可以被连接到数据总线304,以提供与环境情况(例如当日时间、雨、雾、环境光水平等等)、车辆情况(停放的、运动中的、速度、方向)或其他车辆或行人的存在/位置相关的数据。分开的前灯控制器330可以被连接到车辆支持的电力和控制系统。
车辆前灯系统300可以包含电力输入滤波器和控制模块310。该模块310可以支持各种滤波器,以减少传导发射以及提供电力抗扰性。模块310还可以提供静电放电(ESD)保护、负载突降保护、交流发电机磁场衰减保护和反极性保护。
滤波电力可以被提供给LED DC/DC模块312。模块312可以被用于只给LED供电,以及典型地具有在7伏特和18伏特之间的输入电压,标称13.2伏特。输出电压可以被设为略高(例如0.3伏特)于LED阵列的最大电压,该最大电压由工厂或本地校准以及因负载、温度或其他因素而进行的操作情况调节来确定。
滤波电力还被提供给逻辑LDO模块314,该模块可以被用来给微控制器322或主动前灯330中的CMOS逻辑供电。
车辆前灯系统300可以还包含连接到微控制器322的总线收发器320(例如具有UART或SPI接口)。该微控制器322可以对基于或包含来自传感器模块306的数据的车辆输入进行转换。转换后的车辆输入可以包含视频信号,该视频信号可传递到主动前灯模块324中的图像缓冲器。此外,微控制器322可以在启动期间加载默认图像帧和用于开路/短路的像素的测试。在一个实施例中,SPI接口在CMOS中加载图像缓冲器。图像帧可以是全帧、差分的或部分的。其他的微控制器322特征可以包含对CMOS状态以及逻辑LDO输出的控制接口监视,所述CMOS状态包含裸芯温度。在一些实施例中,LED DC/DC输出可以被动态控制以最小化净空。除提供图像帧数据之外,其他前灯功能,诸如连同边灯(side marker)或转向信号灯的互补使用和/或日间行车灯的激活,也可以被控制。
图3B图示了能够接受车辆传感器输入和命令、以及基于前灯或本地安装的传感器的命令的车辆前灯系统330的各种部件和模块的一个实施例。如图3B所示,车辆安装的系统可以包含远程传感器340和能够传感器处理342的电子处理模块。处理后的传感器数据可以被输入到决策算法模块344中的各种决策算法,所述各种决策算法至少部分地基于各种传感器输入情况而得到命令指令或模式创建,所述各种传感器输入情况例如诸如环境光水平、当日时间、车辆位置、其他车辆的位置、路况或天气情况。将理解的是,决策算法模块344所用的有用信息也可以从其他来源提供,包括到用户智能手机的连接,车辆到车辆的无线连接,或者到远程数据或信息资源的连接。
基于决策算法模块344的结果,图像创建模块346提供一种图像模式,该图像模式将最终给车辆前灯提供一种主动光照模式,该主动光照模式是动态可调节的以及适合于情况的。这种被创建的图像模式可以通过图像编码模块348被编码成用于串行或其他传输方案,并且通过高速总线350发送到图像解码模块354。一旦解码,图像模式被提供给uLED模块380以驱动发光像素的激活和亮度。
在一些操作模式中,利用经由决策算法模块344的通过CAN总线352的连接提供给前灯控制模块370的指令,系统330能够利用默认或简化的图像模式来驱动。例如,针对车辆启动的初始模式可以是统一的低光亮度模式。在一些实施例中,前灯控制模块可以用来驱动其他功能,包括传感器的激活或控制。
在其他可能的操作模式中,系统330可以利用这样的图像模式驱动,即,该图像模式来源于本地传感器或者来源于不需要经由CAN总线352或高速总线350的输入的命令。例如,可以使用本地传感器360和能够传感器处理362的电子处理模块。处理后的传感器数据可以被输入到决策算法模块364中的各种决策算法,所述各种决策算法至少部分地基于各种传感器输入情况来得到命令指令或模式创建,所述各种传感器输入情况例如诸如环境光水平、当日时间、车辆位置、其他车辆的位置、路况或天气情况。将理解的是,像车辆支持的远程传感器340那样,决策算法模块364所用的有用信息也可以从其他来源提供,包括到用户智能手机的连接,车辆到车辆的无线连接,或者到远程数据或信息资源的连接。
基于决策算法模块364的结果,图像创建模块366提供一种图像模式,该图像模式将最终给车辆前灯提供一种主动光照模式,该主动光照模式是动态可调节的和适合于情况的。在一些实施例中,这种被创建的图像模式不需要附加的图像编码/解码步骤,而是可以被直接发送到uLED模块380以驱动选定像素的发光。
图4图示了主动前灯系统400的各种部件和模块的一个实施例,主动前灯系统400诸如参照图3的主动前灯330描述的那样。如图所示,内部的模块包含LED配电和监控模块410以及逻辑和控制模块420。
来自车辆的图像或其他数据可以通过SPI接口412到达。连续的图像或视频数据可以被存储在图像帧缓冲器414中。如果没有图像数据是可用的,那么一个或多个保存在备用图像缓冲器中的备用图像可以被引导至图像帧缓冲器414。这样的备用图像可以包含,例如,与车辆的法律允许的近光前灯辐射模式一致的亮度和空间模式。
在操作中,图像中的像素被用来限定像素模块430中对应的LED像素的响应,其中LED像素的亮度和空间调制基于(一个或多个)图像。为了减少数据率问题,在一些实施例中,像素的组(例如5×5的块)可以被控制为单一块。支持高速和高数据率的操作,其中来自连续图像的像素值能够以30 Hz和100 Hz之间的速率被加载为图像序列中的连续帧,典型的是60 Hz。与脉冲宽度调制模块418协作,像素模块中的每个像素可以被操作成以一种模式发光,并且亮度至少部分地取决于保存在图像帧缓冲器414中的图像。
在一个实施例中,通过使用逻辑和控制模块420以及脉冲宽度调制模块418为每个LED像素设置适当的斜坡时间和脉冲宽度,可以单独控制和调节亮度。这允许LED像素激活的分段进行,以减少电力波动,以及提供各种像素诊断功能。
图5图示了用于LED像素阵列的微控制器组件500。该组件500可以通过Vdd和Vss引脚接收逻辑电力。主动矩阵通过多个V
在一个实施例中,SPI帧包含两个停止位(都为“0”)、十个数据位、MSB在前、三个CRC位(x3+x+1)、起始111b和目标000b。时序可以按SafeSPI“帧内”标准来设置。
MOSI字段数据可以如下:
帧0:头部
帧1/2:起始列地址[SCOL]
帧3/4:起始行地址[SROW]
帧5/6:列数[NCOL]
帧7/8:行数[NROW]
帧9:亮度像素[SCOL, SROW]
帧10:亮度像素[SCOL+1, SROW]
帧9 + NCOL:亮度像素[SCOL + NCOL, SROW]
帧9 + NCOL + 1:亮度像素[SCOL, SROW + 1]
帧9 + NCOL + NROW:亮度像素[SCOL + NCOL, SROW + NROW]
MISO字段数据可以包含帧存储器环回(loopback)。
支持60 Hz的字段刷新率(每秒60全帧),如同至少10 Mbps比特率,以及典型地,在15 Mbps至20 Mbps之间。
SPI接口连接到地址生成器、帧缓冲器和备用帧缓冲器。像素可以通过命令和控制模块来设置参数以及修改信号或电力(例如,在输入到帧缓冲器之前通过电力门控,或者在从帧缓冲器输出之后经由脉冲宽度调制或电力门控)。SPI接口可以被连接到地址生成模块,该模块进而给主动矩阵提供行和地址信息。地址生成模块进而可以给帧缓冲器提供帧缓冲器地址。
命令和控制模块可以通过内部集成电路(I
命令和控制模块包含数字模拟转换器(DAC)和两个模拟数字转换器(ADC)。这些分别被用来为被连接的主动矩阵设置V
在一个实施例中,命令和控制模块可以提供下列输入和输出:
到CMOS芯片的输入:
VBIAS:设置用于LDO的偏压。
GET_WORD[…]:请求来自CMOS的输出。
TEST_M1:运行像素测试:LDO处于旁路模式,按顺序寻址列,然后行,输出VF,使用内部的1μA电源。
通过SPI输出Vf值。
TEST_M2:运行像素测试:LDO处于旁路模式,按顺序寻址列,然后行,输出VF,使用外部I电源。
通过SPI输出Vf值。
TEST_M3:LDO处于旁路模式,通过I2C寻址,使用内部1μA电源,通过I2C输出Vf。
TEST_M4:LDO处于旁路模式,通过I2C寻址,使用外部I电源,通过I2C输出Vf。
BUFFER_SWAP:交换到备用缓冲器/从备用缓冲器交换。
COLUMN_NUM:寻址一个特定的行。
ROW_NUM:寻址一个特定的列。
来自CMOS芯片的输出:
CW_PHIV_MIN, CW_PHIV_AVG, CW_PHIV_MAX:工厂测量的EOL全局光通量数据。
CW_VLED_MIN, CW_VLED_AVG, CW_VLED_MAX:工厂测量的EOL全局正向电压数据。
CW_SERIALNO:用于追溯目的的裸芯/CMOS组合序列号。
TEMP_DIE:裸芯温度值。
VF:当用COLUMN_NUM和ROW_NUM寻址时Vf总线的值。
BUFFER_STATUS:指示哪个缓冲器被选择。
支持用于微控制器组件500的各种校准和测试方法。在工厂校准期间,可以测量所有像素的V
图6A和图6B分别图示了像素控制电路600的一个实施例和相关联的时序图610。像素控制电路600包含具有行和列选择的逻辑,以及旁路信号。PWN OSC输入和数据,与来自该逻辑的输出一起,被首先馈送到生成器中,然后馈送到PWM中。PWM进而具有控制特定像素的激活的占空比。参照对图6C的像素控制电路630的以下描述,该内容被更详细地描述。使用外部电流源和LDO旁路功能,可以以1.0μA和1.0 mA来测量所有像素的工厂校准V
如电路600所示,当LED像素由低压差(LDO)线性稳压器支持时,该操作可以被旁路绕过。在旁路绕过期间,可以用内部1μA电流源或V
如图6B所示,图像数据和脉冲宽度调制振荡时钟数据可以由脉冲宽度调制器接收。基于来自逻辑模块的输入,包含脉冲起始、斜坡时间和脉冲持续时间/脉冲宽度(占空比)的栅极时序可以在每个像素的基础上来设置。例如,占空比(δ)可以从帧缓冲器“读取”加载。可以支持8位的δ分辨率。在一个实施例中,可以为每个像素设置不同的脉冲前缘相移(φ)。
图6C图示了不支持旁路电路的像素控制电路630。像素控制电路630包含具有行和列选择的逻辑。来自该逻辑的输出首先被馈送到生成器中,然后馈送到PWM中。PWM进而具有占空比,该占空比以下列方式使用附加的电路来控制特定像素的激活。三个开关,K1到K3,通过从像素外的中心控制块接收到的信号来控制。开关K3是电流源或LDO,并且其电流由Vbias控制。K2是PWM开关,该PWM开关基于由图像数据确定的PWM占空比来打开和关闭。在这个例子中,K2和K3是P-沟道MOSFet,但是它们也可以是任何其他合适形式的开关。在图6C中,PWM信号连接到K2的栅极,并且K2的漏极节点连接到K3的栅极。因此,当PWM信号为高时,K2关闭并且K3开启,所以LED开启并且电流由Vbias电压决定。当PWM为低时,K2开启,拉高K3的栅极并将其关闭,所以LED关闭。
开关K1基于行选择和列选择信号来打开和关闭。只有当特定像素的行和列被选择时,K1将被打开,否则,K1将保持关闭。当K1被打开时,它的阻抗变低,并且阳极处或该像素的Va节点处的LED正向电压,将出现在Vf总线上。因为Vf总线的阻抗远高于K1在打开状态中的阻抗,所以Vf电压将等于Va节点的电压。当故障情形发生在电路或LED中时,LED正向电压可能偏离正常值。因此,Vf电压可以被用来确定像素是否正确地工作或者是否发生任何故障情形,而不需要诸如参照图6A公开的特定像素的旁路电路。用这种方式,可以实现实时或“运行中(on-the-fly)”的检测,使得可以在操作期间监控和报告像素状态。
由于Vf总线是所有像素的共享节点,所以K1开关一次只能为一个像素打开。检测故障情形的最佳时间是当一个像素通过PWM被打开时。优选地,由应用图像限定的PWM值可以被用于测试,但是特定的测试图像也可以是一个选项。当一个像素被关闭时,检测仍然可以完成,但是相比于打开时,以更受限的水平。
对于PWM,K1开关控制可以是灵活的。取决于检测要求,K1的频率可以高于或低于PWM频率。显然,K1的频率越高,检测就越快,也就是说,在一个时间范围内可以测试更多的像素。例如,如果PWM频率是500 Hz,那么在K1频率为500 Hz的情况下,在一个PWM周期(或2ms)期间只能测试一个像素,然而在K1的频率为5000 Hz的情况下,在2 ms期间可以测试十个像素。此外,两个频率可以是同步的或异步的。
图6D图示了用于像素控制电路的示例性控制方案。在这个实施例中,K1的频率被设置为接近PWM频率且同步打开。注意,虽然这个示例只显示了三个像素,但它可以以类似的方式延伸到像素的整个矩阵阵列。对于每个像素,该图显示了PWM信号电压、Va节点电压和K1控制电压。对于正常的像素,当PMM信号为高时,Va节点电压为高,而当PWM为低时,Va节点电压为低。同样地,当K1控制电压为高时K1打开,而当该控制电压为低时K1关闭。取决于电路设计,PWM和K1的控制相位可以是相反的,也就是说,当为低时,打开相应的开关,而当为高时,关闭该相应的开关。
像素1的操作过程如下:
t1~t4:PWM电压为高。像素被打开,并且Va节点为高。同时,K1的控制电压在t1时也为高,与PWM的打开同步。对于像素2和3,K1的控制电压保持为低。像素1的K1被打开,并且Va节点电压出现在Vf总线上,所以此时Vf总线的电压等于像素1的Va电压。K1的关闭时刻t3比PWM的关闭时刻t4早,使得像素测试可以在像素关闭前完成。
像素2的操作过程如下:
在t2时:PWM为高,并且像素被打开。t1和t2之间轻微的滞后是相移。此刻,像素1的K1仍然打开,所以像素2的K1控制电压为低,并且在这个PWM循环没有测试像素2。
t5~t7:PWM为高,并且像素又第二次被打开。在打开时刻t5,K1控制电压与像素2同步,并且保持打开直到t6。对于其他两个像素,K1控制电压保持为低。因此,Vf总线电压反映了像素2的Va节点电压。在这个示例中,像素2的PWM占空比(占空比是以周期或循环时间的百分比表示的导通时间或打开时间)大于像素1的PWM占空比。当打开时,像素2的Va电压低于像素1的Va电压。
像素3的操作过程如下:
PWM始终为低。像素保持关闭,并且Va节点电压为低。
t8~t9:K1控制电压对于像素3为高,并且对于其他两个像素为低。因此,此时Vf总线的电压表示像素3的低Va电压。Va节点电压关系为:
图7更详细地图示了支持LDO旁路的主动矩阵阵列的框图600。行和列选择被用来寻址单独的像素,其被提供以数据线、旁路线、PWMOSC线、V
受益于前面的描述和相关附图中呈现的教导,本领域技术人员将想到本发明的许多修改和其他实施例。因此,应当理解,本发明不局限于所公开的具体实施例,而是修改和实施例都旨在被包含于所附权利要求的范围内。还应理解,可以在缺少本文未具体公开的元件/步骤的情况下实践本发明的其他实施例。
- 用于高刷新率LED阵列的动态像素诊断
- 用于高刷新率LED阵列的动态像素诊断